You might also like
- Design of High-Speed Railway Turnouts: Theory and ApplicationsFrom EverandDesign of High-Speed Railway Turnouts: Theory and ApplicationsRating: 4.5 out of 5 stars4.5/5 (4)
- Terramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road Vehicle Performance and DesignFrom EverandTerramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road Vehicle Performance and DesignRating: 5 out of 5 stars5/5 (1)
- A Methodology For The Assessment of The Train Running Safety On BridgesDocument296 pagesA Methodology For The Assessment of The Train Running Safety On BridgesMarcos marinhoNo ratings yet
- NVH A Review of Experimental Techniques For NVHDocument8 pagesNVH A Review of Experimental Techniques For NVHMithun KrishnaNo ratings yet
- Gear Noise Evaluation Through Multibody TE-based S PDFDocument15 pagesGear Noise Evaluation Through Multibody TE-based S PDFFiras BejarNo ratings yet
- Alavudeen & VenkateshwaranDocument4 pagesAlavudeen & Venkateshwaransantoshk_itbhuvNo ratings yet
- 1-S2.0-S0888327009002672-Main - Luis EduardoDocument23 pages1-S2.0-S0888327009002672-Main - Luis EduardoLuís EduardoNo ratings yet
- Muffler Modeling by Transfer Matrix Method and Experimental VerificationDocument9 pagesMuffler Modeling by Transfer Matrix Method and Experimental VerificationSupatmono NAINo ratings yet
- Kucukkoc 2016Document37 pagesKucukkoc 2016nrrzqh 99No ratings yet
- The Importance of Sleepers Spacing in RailwaysDocument15 pagesThe Importance of Sleepers Spacing in RailwaysPatrick Macedo100% (1)
- Liu Et Al 2020 Mechanism of Interior Noise Generation in High Speed Vehicle Based On Anti Noise Operational TransferDocument15 pagesLiu Et Al 2020 Mechanism of Interior Noise Generation in High Speed Vehicle Based On Anti Noise Operational TransferHồ Thanh TùngNo ratings yet
- Ijhvs 2021 114413Document14 pagesIjhvs 2021 114413Rodrigo BaldovinoNo ratings yet
- New Predictive ModelDocument17 pagesNew Predictive ModelsiritapeNo ratings yet
- Advances in Engine and Powertrain Research and TechnologyDocument417 pagesAdvances in Engine and Powertrain Research and Technologyelectrones CBNo ratings yet
- Vehicle Dynamics ManuscriptDocument9 pagesVehicle Dynamics Manuscriptaditya bhandakkarNo ratings yet
- Reference Values For Railway Sidings Track Geometry: SciencedirectDocument10 pagesReference Values For Railway Sidings Track Geometry: Sciencedirectjavier sotoNo ratings yet
- Finite Element Model For Modal Analysis of Engine-Transmission Unit: Numerical and Experimental..Document13 pagesFinite Element Model For Modal Analysis of Engine-Transmission Unit: Numerical and Experimental..Jai SharmaNo ratings yet
- Course Schedule For Computational Acoustics IIT BhubaneshwarDocument5 pagesCourse Schedule For Computational Acoustics IIT Bhubaneshwarjamin2020No ratings yet
- Monorail ThesisDocument7 pagesMonorail Thesisjillcrawfordbaltimore100% (2)
- Francesco RIPAMONTI - CURRICULUM VITAE (September 2020) : Contact InformationDocument6 pagesFrancesco RIPAMONTI - CURRICULUM VITAE (September 2020) : Contact InformationVictor CaceresNo ratings yet
- On The Use of Experimental Modal Analysis For System Identification of A Railway PantographDocument13 pagesOn The Use of Experimental Modal Analysis For System Identification of A Railway PantographResearch1 amtdcNo ratings yet
- IgnestiMariniMeliRindi PaperDocument20 pagesIgnestiMariniMeliRindi Paperbalaji817150No ratings yet
- Vehicular Ad-Hoc Using MatlabDocument110 pagesVehicular Ad-Hoc Using MatlabAyshwar Venkatesh0% (1)
- A Proof of InnocenceDocument15 pagesA Proof of InnocencesandipgNo ratings yet
- Structural Analysis For Handle Bar of A Motor-Cycle For Buckling Strength and Design EnhancementDocument2 pagesStructural Analysis For Handle Bar of A Motor-Cycle For Buckling Strength and Design EnhancementRasbin SharmaNo ratings yet
- Blastless Applsci-11-11190Document16 pagesBlastless Applsci-11-11190Shoaib ShaikhNo ratings yet
- Ijerph 17 02807 PDFDocument14 pagesIjerph 17 02807 PDFAsyraf MustafaNo ratings yet
- Modal Analysis of Cantilever Beam Structure Using Finite Element Analysis and Experimental AnalysisDocument8 pagesModal Analysis of Cantilever Beam Structure Using Finite Element Analysis and Experimental AnalysisAJER JOURNALNo ratings yet
- Design of Wind TunnelDocument94 pagesDesign of Wind TunnelVijayraj Singh Rathore0% (1)
- Model Updating On BIWDocument12 pagesModel Updating On BIWIamzura AbdullahNo ratings yet
- Identification of Noise Modes For Automobile Operational Modal AnalysisDocument13 pagesIdentification of Noise Modes For Automobile Operational Modal AnalysisMeasurement SystemsNo ratings yet
- Universitat Polit' Ecnica de Val' Encia: Departamento de Ingenier Ia Mec Anica y de MaterialesDocument238 pagesUniversitat Polit' Ecnica de Val' Encia: Departamento de Ingenier Ia Mec Anica y de MaterialesIvica BudrovacNo ratings yet
- Parametric Study of Airfoil Analysis Using CFD PDFDocument9 pagesParametric Study of Airfoil Analysis Using CFD PDFMr. S. Thiyagu Asst Prof MECHNo ratings yet
- IP0363 Pouget EDocument11 pagesIP0363 Pouget EoscarariagnaNo ratings yet
- Pagination JNDT 102145Document7 pagesPagination JNDT 102145latifa boussaliaNo ratings yet
- Dobaj 2016 IOP Conf. Ser.: Mater. Sci. Eng. 148 012034Document11 pagesDobaj 2016 IOP Conf. Ser.: Mater. Sci. Eng. 148 012034pinabarrosNo ratings yet
- Tom Lab ManuelDocument61 pagesTom Lab ManuelSarath ChandraNo ratings yet
- 2022 Dynamic Vibration Absorberswith Negative Stiffnessand Inerter Dampersforthe Ballasted Track SystemDocument18 pages2022 Dynamic Vibration Absorberswith Negative Stiffnessand Inerter Dampersforthe Ballasted Track SystemDivya MahalsekarNo ratings yet
- Department of Mechanical Engineering, UMT SialkotDocument9 pagesDepartment of Mechanical Engineering, UMT SialkotZAIN ALIINo ratings yet
- ANew Passive MethodologyDocument10 pagesANew Passive MethodologyLiju DanielNo ratings yet
- Comparative Study of Frequency Domain Filtered-X LMS Algorithms Applied To Vehicle Powertrain Noise ControlDocument17 pagesComparative Study of Frequency Domain Filtered-X LMS Algorithms Applied To Vehicle Powertrain Noise ControlJie DuanNo ratings yet
- Vehicular Technologies Increasing ConnectivityDocument458 pagesVehicular Technologies Increasing ConnectivityJosé RamírezNo ratings yet
- 2008 - A Finite Element Approach For The Simulation of Tire Rolling NoiseDocument20 pages2008 - A Finite Element Approach For The Simulation of Tire Rolling NoiseGuilherme Henrique GodoiNo ratings yet
- NDT2012 2C3Document10 pagesNDT2012 2C3hadiNo ratings yet
- Entropy: A New Feature Extraction Method Based On EEMD and Multi-Scale Fuzzy Entropy For Motor BearingDocument21 pagesEntropy: A New Feature Extraction Method Based On EEMD and Multi-Scale Fuzzy Entropy For Motor BearingAtoui IssamNo ratings yet
- Schlechte ThomasDocument244 pagesSchlechte Thomasmhenley8059No ratings yet
- A Review On Current Techniques For Acoustic Performance of An Automobile Exhaust Muffler IJERTCONV4IS31016Document7 pagesA Review On Current Techniques For Acoustic Performance of An Automobile Exhaust Muffler IJERTCONV4IS31016Cosmin DxiNo ratings yet
- Fatigue Life Prediction For Automobile Coil Spring Using Modal AnalysisDocument6 pagesFatigue Life Prediction For Automobile Coil Spring Using Modal Analysisvivashwanth paiNo ratings yet
- The Tower Shadow Effect in Downwind Wind Turbines: Marit ReisoDocument154 pagesThe Tower Shadow Effect in Downwind Wind Turbines: Marit ReisoCarlos Vitor Silva SarmentoNo ratings yet
- EMC and RailwayDocument171 pagesEMC and RailwayCláudia InafukoNo ratings yet
- Analiza Vibro-Acustica Pentru Habitaclul Autovehiculelor GreleDocument8 pagesAnaliza Vibro-Acustica Pentru Habitaclul Autovehiculelor GreleCășeriu BiancaNo ratings yet
- Design and Modification of Commercial Vehicle Braking System For Reducing Noise and GrabbingDocument7 pagesDesign and Modification of Commercial Vehicle Braking System For Reducing Noise and GrabbingdeepakNo ratings yet
- Journal of Wind Engineering and Industrial Aerodynamics: Chris BakerDocument22 pagesJournal of Wind Engineering and Industrial Aerodynamics: Chris BakerterreNo ratings yet
- A Mathematical Model of Vibration Signal For Multistage Wind Turbine Gearboxes With Transmission Path Effect AnalysisDocument17 pagesA Mathematical Model of Vibration Signal For Multistage Wind Turbine Gearboxes With Transmission Path Effect Analysisrahul reddy100% (1)
- A Railway Wheel Wear Prediction Tool Based On A Multibody SoftwareDocument21 pagesA Railway Wheel Wear Prediction Tool Based On A Multibody SoftwareEnyew MelesseNo ratings yet
- Workshop Speakers Bio Datav2Document6 pagesWorkshop Speakers Bio Datav2dkaushiksondurNo ratings yet
- Wsf-4 2461 ManuscriptDocument6 pagesWsf-4 2461 ManuscriptRonald GeorgeNo ratings yet
- Comparative Analysis For Link Cross-Section of Manipulator ArmsDocument24 pagesComparative Analysis For Link Cross-Section of Manipulator ArmsMoftah EddeifNo ratings yet
- A Comprehensive Model of The Railway Wheelset-Track Interaction in CurvesDocument32 pagesA Comprehensive Model of The Railway Wheelset-Track Interaction in CurvesHà Tiến ĐôngNo ratings yet
- Robotics Modeling Planning and Control Siciliano BDocument2 pagesRobotics Modeling Planning and Control Siciliano BBhavesh ShiyaniNo ratings yet
- The Effect of Ring Dampers On Noise Radiation From Railway WheelsDocument8 pagesThe Effect of Ring Dampers On Noise Radiation From Railway WheelsainaraNo ratings yet
- Yaw Damper Modelling and Its Influence On Railway Dynamic StabilityDocument24 pagesYaw Damper Modelling and Its Influence On Railway Dynamic StabilityainaraNo ratings yet
- Propagation of Noise Along A Finite Impedance BoundaryDocument10 pagesPropagation of Noise Along A Finite Impedance BoundaryainaraNo ratings yet
- Indirect Methods of Obtaining Activity and Mobility of Structure-Borne Sound SourcesDocument311 pagesIndirect Methods of Obtaining Activity and Mobility of Structure-Borne Sound SourcesainaraNo ratings yet
- DS Quantum Q 6800 NordsonASYMTEKDocument3 pagesDS Quantum Q 6800 NordsonASYMTEKDanijela KoNo ratings yet
- CMMSDocument86 pagesCMMSVicky Achmad100% (2)
- Princess Elyn NSTP-CWTS 1Document4 pagesPrincess Elyn NSTP-CWTS 1PRINCESS ELYN SALANGUSTENo ratings yet
- 2 Lesson Plans Eng 480 4 9 19Document4 pages2 Lesson Plans Eng 480 4 9 19api-378068078No ratings yet
- Research Methods - A Framework For Evidence-Based Clinical Practice-Wendy L. Hurley, Craig R.Document450 pagesResearch Methods - A Framework For Evidence-Based Clinical Practice-Wendy L. Hurley, Craig R.DannyCespedes100% (1)
- Measurement of Development of Cognitive and Attention Functions in ChildrenDocument7 pagesMeasurement of Development of Cognitive and Attention Functions in ChildrenAnton HrivnákNo ratings yet
- Rres Module 1 - Lesson 1Document3 pagesRres Module 1 - Lesson 1Ella BrionesNo ratings yet
- Prospects": Psychology Research in The Philippines: Observations andDocument20 pagesProspects": Psychology Research in The Philippines: Observations andCho AndreaNo ratings yet
- GE 101 - Course SyllabusDocument2 pagesGE 101 - Course SyllabusMj Alisen Ocampo100% (1)
- 4-Month GRE Prep Study PlanDocument12 pages4-Month GRE Prep Study PlanMikeyNo ratings yet
- Best Teaching Practices in Anatomy Education A Critical Review LEIDODocument7 pagesBest Teaching Practices in Anatomy Education A Critical Review LEIDOCamilo Benavides BurbanoNo ratings yet
- Ass4 Record of Module Use IM RevisedDocument1 pageAss4 Record of Module Use IM RevisedEdrine PetalcorinNo ratings yet
- Ada2oy - Physical Theatre - AssignmentDocument3 pagesAda2oy - Physical Theatre - Assignmentapi-202765737No ratings yet
- My ChildhoodDocument19 pagesMy ChildhoodGauri Mittal100% (1)
- Cmap Mapeh-7Document17 pagesCmap Mapeh-7Gam Mae RamNo ratings yet
- Weekly Home Learning Plan For Grade 7: Department of EducationDocument4 pagesWeekly Home Learning Plan For Grade 7: Department of EducationJan IcejimenezNo ratings yet
- TBI Longman Introductory The Paper Test 84 87Document4 pagesTBI Longman Introductory The Paper Test 84 87happinesNo ratings yet
- Chodas Day2 BriefingDocument21 pagesChodas Day2 BriefingScribduseraccountNo ratings yet
- Level 1 English, 2018Document12 pagesLevel 1 English, 2018Avneet KaurNo ratings yet
- Learning Theories and Their Applications in The ClassroomDocument2 pagesLearning Theories and Their Applications in The ClassroomkianaNo ratings yet
- Vaggione Archaeus 2002Document4 pagesVaggione Archaeus 2002CAStmNo ratings yet
- Positionality StatementDocument2 pagesPositionality StatementFolkburgsNo ratings yet
- Week 2 - Introduction To Ukqf2332Document11 pagesWeek 2 - Introduction To Ukqf2332Marco BonoNo ratings yet
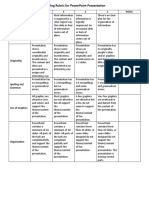
- Grading Rubric For PowerPoint Presentation & Oral ReportingDocument2 pagesGrading Rubric For PowerPoint Presentation & Oral Reportingshiela mae ucangNo ratings yet
- 1-In A Cashless Society, People Use More Credit Cards. What Are The Advantages and Disadvantages of This Phenomenon?Document33 pages1-In A Cashless Society, People Use More Credit Cards. What Are The Advantages and Disadvantages of This Phenomenon?Jose ChavezNo ratings yet
- Episode 1 (Spoken)Document25 pagesEpisode 1 (Spoken)Dawit B MelkaNo ratings yet
- LPT SoonDocument6 pagesLPT SoonMohideen Kumayog MohamadNo ratings yet
- Humss 1 ResearchDocument42 pagesHumss 1 ResearchSakura HayataNo ratings yet
- Lecture 4. Film Project Management-1Document46 pagesLecture 4. Film Project Management-1Asish DashNo ratings yet
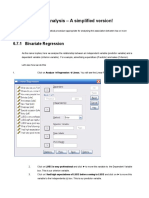
- A Simplified Version of Regression Analysis 25.11.11Document7 pagesA Simplified Version of Regression Analysis 25.11.11Shahin SamadliNo ratings yet