You might also like
- Autoregression AR (P)Document10 pagesAutoregression AR (P)deetanaNo ratings yet
- TS Chapter6 2Document13 pagesTS Chapter6 2myriam el amriNo ratings yet
- Some Properties of Entropy For The Exponentiated Pareto Distribution (EPD) Based On Order StatisticsDocument11 pagesSome Properties of Entropy For The Exponentiated Pareto Distribution (EPD) Based On Order StatisticsSarthak JainNo ratings yet
- Lec8 PDFDocument5 pagesLec8 PDFjuanagallardo01No ratings yet
- Last Time TodayDocument34 pagesLast Time TodayHarshvardhan SinghNo ratings yet
- CS 229, Public Course Problem Set #4 Solutions: Unsupervised Learn-Ing and Reinforcement LearningDocument12 pagesCS 229, Public Course Problem Set #4 Solutions: Unsupervised Learn-Ing and Reinforcement Learninglalm9931No ratings yet
- Covariances of ARMA ProcessesDocument9 pagesCovariances of ARMA ProcessesRyan TeehanNo ratings yet
- MIT18 S096F13 Pset4Document7 pagesMIT18 S096F13 Pset4TheoNo ratings yet
- Solutions # 8: Department of Physics IIT Kanpur, Semester II, 2022-23Document9 pagesSolutions # 8: Department of Physics IIT Kanpur, Semester II, 2022-23darshan sethiaNo ratings yet
- Gamma DistributionDocument3 pagesGamma Distributionqwertypushkar123No ratings yet
- Random Processes: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inDocument10 pagesRandom Processes: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inSonu kumarNo ratings yet
- Ee308 Endsem Solutions 2018Document14 pagesEe308 Endsem Solutions 2018Aakanksha JainNo ratings yet
- Bayes Estimator of One Parameter Gamma Distribution Under Quadratic and LINEX Loss Function Wael Abdul Lateef JasimDocument16 pagesBayes Estimator of One Parameter Gamma Distribution Under Quadratic and LINEX Loss Function Wael Abdul Lateef JasimAyush choudharyNo ratings yet
- .1 Fourier Analysis For CT Signals and SystemsDocument2 pages.1 Fourier Analysis For CT Signals and SystemsYassine DjillaliNo ratings yet
- 4.5 Autoregressive Processes AR (P) : Definition 4.7. AnDocument2 pages4.5 Autoregressive Processes AR (P) : Definition 4.7. AnharryNo ratings yet
- Monotonicity Properties of The Gamma FunctionDocument4 pagesMonotonicity Properties of The Gamma Functionom younesNo ratings yet
- Time Series Analysis Lecture 8-3Document12 pagesTime Series Analysis Lecture 8-3wcxqqkmpwhNo ratings yet
- Template Chaos CircuitDocument14 pagesTemplate Chaos CircuitEnrique PriceNo ratings yet
- 3.2: Causality and Invertibility: Example: Mean and ACVF of An AR (1) Process 3.2.1Document5 pages3.2: Causality and Invertibility: Example: Mean and ACVF of An AR (1) Process 3.2.1Ana ScaletNo ratings yet
- CF NotesDocument7 pagesCF NotesHồ Nghĩa PhươngNo ratings yet
- Local Existence and Blow-Up Criterion of 3D Ideal Magnetohydrodynamics EquationsDocument8 pagesLocal Existence and Blow-Up Criterion of 3D Ideal Magnetohydrodynamics EquationsNo FaceNo ratings yet
- ARMADocument8 pagesARMAElaineNo ratings yet
- Lecture Note SGDDocument4 pagesLecture Note SGDNishant PandaNo ratings yet
- FishingDocument10 pagesFishingvickyNo ratings yet
- Section 7Document3 pagesSection 7Victor RudenkoNo ratings yet
- DSP FormulaDocument2 pagesDSP Formuladangtran_namNo ratings yet
- Definition 2.3.6.: TX X TX X TX X TX X 0X XDocument16 pagesDefinition 2.3.6.: TX X TX X TX X TX X 0X Xdharani VNo ratings yet
- Ejercicios Con Una Formula RaraDocument23 pagesEjercicios Con Una Formula RaraDavid NiceDethNo ratings yet
- V&N 354 LectureLesing6Document7 pagesV&N 354 LectureLesing6YemukelaniNo ratings yet
- Lec1 08 PDFDocument15 pagesLec1 08 PDFArseniyNo ratings yet
- Monte Carlo Integration LectureDocument8 pagesMonte Carlo Integration LectureNishant PandaNo ratings yet
- Calculus2014 Lecturenote 9 30Document5 pagesCalculus2014 Lecturenote 9 30盧思宇No ratings yet
- Методичка Stat. InferenceDocument45 pagesМетодичка Stat. InferenceYehorNo ratings yet
- No Zero-Crossings For Random Polynomials and The Heat Equation Amir Dembo and Sumit Mukherjee - Kabluchko - Poonen-Zeitouni-Thomas BloomDocument34 pagesNo Zero-Crossings For Random Polynomials and The Heat Equation Amir Dembo and Sumit Mukherjee - Kabluchko - Poonen-Zeitouni-Thomas BloomSam TaylorNo ratings yet
- SolutionDocument4 pagesSolutionAssanga RonaldNo ratings yet
- Math557 13 HypTesting ExamplesDocument8 pagesMath557 13 HypTesting ExamplesI2I4IOO5OMUTIA PUTRI APSARINo ratings yet
- CH-4, Math-5 - Lecture - NoteDocument9 pagesCH-4, Math-5 - Lecture - Notealexkhan656No ratings yet
- Exact and Approximate Expressions For The Period of Anharmonic OscillatorsDocument11 pagesExact and Approximate Expressions For The Period of Anharmonic OscillatorsjeremyNo ratings yet
- Calculus2014 Lecturenote 10 9Document8 pagesCalculus2014 Lecturenote 10 9盧思宇No ratings yet
- Chapter 6Document6 pagesChapter 6TrevorNo ratings yet
- Optimal Control (Course Code: 191561620)Document4 pagesOptimal Control (Course Code: 191561620)Abdesselem BoulkrouneNo ratings yet
- MSexam Stat 2016S SolutionDocument11 pagesMSexam Stat 2016S SolutionRobinson Ortega MezaNo ratings yet
- 2017optimalcontrol Solution AprilDocument4 pages2017optimalcontrol Solution Aprilenrico.michelatoNo ratings yet
- Signal Processing Review: 3.1 LTI SystemsDocument22 pagesSignal Processing Review: 3.1 LTI SystemsnctgayarangaNo ratings yet
- Brownian MotionDocument6 pagesBrownian MotionXin CuiNo ratings yet
- STAT732: Solutions For Homework 2: Due: Wednesday, Feb 14Document7 pagesSTAT732: Solutions For Homework 2: Due: Wednesday, Feb 14Robinson Ortega MezaNo ratings yet
- T T 1 T 2 T 3 T TDocument2 pagesT T 1 T 2 T 3 T TGeorgios GougouliasNo ratings yet
- Eyup,+4 XXX IbisDocument13 pagesEyup,+4 XXX IbisamonateeyNo ratings yet
- Unbounded ReviewDocument7 pagesUnbounded ReviewGerman ChiappeNo ratings yet
- Averaging: Theory, Definition and IssuesDocument8 pagesAveraging: Theory, Definition and IssuesMadushanka SugathNo ratings yet
- Midterm 2010 SolutionsDocument8 pagesMidterm 2010 SolutionsErico ArchetiNo ratings yet
- 2022 - Week - 2 - Ch.2 RV and Stochastic ProbDocument15 pages2022 - Week - 2 - Ch.2 RV and Stochastic Probseungnam kimNo ratings yet
- 3 HandoutDocument6 pages3 Handoutaladar520No ratings yet
- Chapter 2 Stationarity, Spectral Theorem, Ergodic Theorem (Lecture On 01-07-2021) - STAT 243 - Stochastic ProcessDocument4 pagesChapter 2 Stationarity, Spectral Theorem, Ergodic Theorem (Lecture On 01-07-2021) - STAT 243 - Stochastic ProcessProf. Madya Dr. Umar Yusuf MadakiNo ratings yet
- Unit 3 Fourier Transforms Properties Questions and Answers - Sanfoundry PDFDocument4 pagesUnit 3 Fourier Transforms Properties Questions and Answers - Sanfoundry PDFzohaib100% (1)
- Homework 3 Solutions: Joe Neeman September 22, 2010Document5 pagesHomework 3 Solutions: Joe Neeman September 22, 2010ShuX13No ratings yet
- Solutions To Selected Exercises From Chapter 9 Bain & Engelhardt - Second EditionDocument13 pagesSolutions To Selected Exercises From Chapter 9 Bain & Engelhardt - Second EditionMezika WahyuniNo ratings yet
- Parameter TrackingDocument35 pagesParameter TrackingErik RayNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Table of Differentiation and Integration, Laplace TransformDocument9 pagesTable of Differentiation and Integration, Laplace Transformt tNo ratings yet
- 002 2012 Intro To Optimal ControlDocument53 pages002 2012 Intro To Optimal Controlt tNo ratings yet
- ECON7430Document2 pagesECON7430t tNo ratings yet
- ECON7025Document2 pagesECON7025t tNo ratings yet
- ECON7100Document2 pagesECON7100t tNo ratings yet
- MTH101 TutorialDocument2 pagesMTH101 TutorialOnochie EnunwaonyeNo ratings yet
- Glossary of MathsDocument52 pagesGlossary of MathsManduri Nagamalleswara Prasad100% (1)
- POW Solutions Math-7 22-5-2018supportmaterialmaths Solution 7 PDFDocument224 pagesPOW Solutions Math-7 22-5-2018supportmaterialmaths Solution 7 PDFTeena sharmaNo ratings yet
- 3 Mat070 Module3Document65 pages3 Mat070 Module3MAECHAILAH MANOS100% (1)
- Calculus 2 - Tutorial 2Document4 pagesCalculus 2 - Tutorial 2Albert CofieNo ratings yet
- 01 - Review of Exponent Laws HandoutDocument3 pages01 - Review of Exponent Laws Handoutrachita.devara1No ratings yet
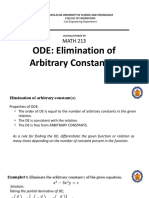
- ODE: Elimination of Arbitrary Constant(s) : MATH 213Document10 pagesODE: Elimination of Arbitrary Constant(s) : MATH 213Anjanette ManubayNo ratings yet
- SimplifyDocument4 pagesSimplifyMulangira MulangiraNo ratings yet
- 11.limit of Economic HaulDocument9 pages11.limit of Economic HaulShaneNo ratings yet
- L-2 - Relations and LatticesDocument14 pagesL-2 - Relations and LatticesCustom 11No ratings yet
- 4MA1HR November 2020 QP 2Document24 pages4MA1HR November 2020 QP 2jackNo ratings yet
- (Akira Takayama) Analytical Methods in EconomicsDocument693 pages(Akira Takayama) Analytical Methods in EconomicsCarla Valverde España100% (4)
- Very Valuable For Calculus For SurfaceDocument14 pagesVery Valuable For Calculus For Surface吳庭昕No ratings yet
- Structural Dynamics & Earthquake EngineeringDocument8 pagesStructural Dynamics & Earthquake EngineeringHema Chandra Reddy KarimireddyNo ratings yet
- H2 X RDocument38 pagesH2 X RRuben Ainsten GaussNo ratings yet
- SpinDocument6 pagesSpinCélio LimaNo ratings yet
- Precalculus:: A Self-Learning Module For STEM 11Document27 pagesPrecalculus:: A Self-Learning Module For STEM 11Raffy Jay JaminNo ratings yet
- Quantitative Aptitude - Vol 1Document189 pagesQuantitative Aptitude - Vol 1Ruby Sheela100% (2)
- Ee263 Course ReaderDocument425 pagesEe263 Course ReadershuishenNo ratings yet
- Vector Calculus - Final - Exam-IDocument6 pagesVector Calculus - Final - Exam-Itinkertinker1435No ratings yet
- Ma1014 Unit I QBDocument22 pagesMa1014 Unit I QBritesh1996No ratings yet
- Several Real Variables by Shmuel KantorovitzDocument315 pagesSeveral Real Variables by Shmuel KantorovitzIrina PaniaguaNo ratings yet
- Homework Diff 2 PDFDocument11 pagesHomework Diff 2 PDFKking ChungNo ratings yet
- Fractal PDFDocument9 pagesFractal PDFMukundNo ratings yet
- Algebra by CodeDocument130 pagesAlgebra by Codeapi-295444746No ratings yet
- Assignment #4 Differential EquationDocument3 pagesAssignment #4 Differential EquationLorman MaylasNo ratings yet
- Computation FractionsDocument6 pagesComputation Fractionsreeta ramNo ratings yet
- Algebraic FractionsDocument35 pagesAlgebraic FractionsZinnat OobayeNo ratings yet
- Solution Manual For Precalculus 5th EditionDocument24 pagesSolution Manual For Precalculus 5th EditionToddNovakiqzmg100% (35)
- RepeatedeigsDocument7 pagesRepeatedeigsSaurabh YadavNo ratings yet