You might also like
- Computer Organization and Architecture Lecture NotesDocument125 pagesComputer Organization and Architecture Lecture NotesokNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- COA1Document56 pagesCOA1mayur jagdaleNo ratings yet
- Presentaion 6 Microcontroller and MicroprocessorDocument27 pagesPresentaion 6 Microcontroller and MicroprocessorwabdushukurNo ratings yet
- I/O Subsystem Organization and Interfacing Cs 147Document41 pagesI/O Subsystem Organization and Interfacing Cs 147Sai SaiNo ratings yet
- Computer System: Prepared By: Suresh KhatiwadaDocument18 pagesComputer System: Prepared By: Suresh KhatiwadakamalshrishNo ratings yet
- Microprocessor - Introduction To Basic MicroprocessorDocument21 pagesMicroprocessor - Introduction To Basic MicroprocessorTanveer Ahmed HakroNo ratings yet
- Introduction To Computer Organization Basic Computer OrganizationDocument3 pagesIntroduction To Computer Organization Basic Computer OrganizationSachin creationsNo ratings yet
- Introduction To Computer Architecture 1-1Document4 pagesIntroduction To Computer Architecture 1-1Jedekia kicaNo ratings yet
- Unit 1&2 CoaDocument38 pagesUnit 1&2 Coasahil914012No ratings yet
- Computer StructureDocument16 pagesComputer Structuresamuel ceasarNo ratings yet
- Intro to Computers: CPU, Memory & I/ODocument13 pagesIntro to Computers: CPU, Memory & I/OFintonPaulNo ratings yet
- General Organisation of A Micro ProcessorDocument8 pagesGeneral Organisation of A Micro ProcessornelsrodrigNo ratings yet
- Chapter OneDocument27 pagesChapter OneSisay ADNo ratings yet
- Distinguish computer architecture and organizationDocument36 pagesDistinguish computer architecture and organizationsunnybaggaNo ratings yet
- Internal Structure of PLCDocument12 pagesInternal Structure of PLCBHANU PRAKASHNo ratings yet
- Basic Design of MicrocomputerDocument3 pagesBasic Design of MicrocomputerBianca Axel GarciaNo ratings yet
- UNIT - 5 - 1st PartDocument22 pagesUNIT - 5 - 1st PartR BHARATH VARDHAN REDDYNo ratings yet
- Computer Architecture & System BusesDocument7 pagesComputer Architecture & System BusesPradnya Yadav Dabhade100% (1)
- Computer System OrganizationDocument126 pagesComputer System Organizationbiswadeepbasak0212No ratings yet
- Coa Unit-1Document21 pagesCoa Unit-1singhshiva8082No ratings yet
- Module VDocument41 pagesModule VAryan JainNo ratings yet
- Coa Unit 1Document28 pagesCoa Unit 1vivek kumarNo ratings yet
- Computer Organization and ArchitectureDocument48 pagesComputer Organization and Architecturefreedom mutepfeNo ratings yet
- CPU Architecture ExplainedDocument10 pagesCPU Architecture ExplainedRohith PeddiNo ratings yet
- COMPUTER-ARCHITECTURE Lec 3Document9 pagesCOMPUTER-ARCHITECTURE Lec 3Ahmed Yahia MogaliNo ratings yet
- Unit 1Document6 pagesUnit 1Sonu zehen001No ratings yet
- Module 5 MicroprocessorDocument7 pagesModule 5 MicroprocessornatsuNo ratings yet
- CO Unit1Document10 pagesCO Unit1Sripathi RaviNo ratings yet
- Unit 4Document85 pagesUnit 4Chadaram JagadishNo ratings yet
- 13.01 Lesson Notes Input DevicesDocument20 pages13.01 Lesson Notes Input DevicesjeannenhangaNo ratings yet
- Basic Design of MicrocomputerDocument4 pagesBasic Design of MicrocomputerBianca Axel GarciaNo ratings yet
- COA Unit 1Document25 pagesCOA Unit 1Shivam KumarNo ratings yet
- Computer Organization and Architecture Module 1 (Kerala University) NotesDocument30 pagesComputer Organization and Architecture Module 1 (Kerala University) NotesAssini Hussain100% (11)
- Computer Organization and Architecture Module 1Document46 pagesComputer Organization and Architecture Module 1Assini Hussain100% (1)
- Introduction To Pic Microcontroller'SDocument4 pagesIntroduction To Pic Microcontroller'SSurbhi JainNo ratings yet
- Presentation ON: Introduction To MicroprocessorDocument20 pagesPresentation ON: Introduction To MicroprocessorManish JangidNo ratings yet
- Introduction to Peripherals and Interfacing LectureDocument23 pagesIntroduction to Peripherals and Interfacing Lectureabu sayedNo ratings yet
- CO UNIT IVDocument5 pagesCO UNIT IVMohd Ismail GourNo ratings yet
- 05 System UnitnDocument9 pages05 System UnitnInomusa MhlopeNo ratings yet
- Lecture 1.1.1 (Digital Computer)Document6 pagesLecture 1.1.1 (Digital Computer)adityaNo ratings yet
- Intro To Microcomputers: Block Diagram of A Typical MicrocomputerDocument6 pagesIntro To Microcomputers: Block Diagram of A Typical MicrocomputerShaheer TariqNo ratings yet
- Chapter 4 - SGDocument4 pagesChapter 4 - SGGabriel TomagosNo ratings yet
- 2 Von Neumann Architecture: Registers. The Control Unit Determines The Order in Which Instructions Should Be Executed andDocument66 pages2 Von Neumann Architecture: Registers. The Control Unit Determines The Order in Which Instructions Should Be Executed andLoser IdiotNo ratings yet
- Computer Concept: Dr. Bushra Naz Soomro Bushra - Naz@faculty - Muet.edu - PKDocument67 pagesComputer Concept: Dr. Bushra Naz Soomro Bushra - Naz@faculty - Muet.edu - PKabdNo ratings yet
- ITC CPU StructureFunctionDocument2 pagesITC CPU StructureFunctionsehrish duuraniNo ratings yet
- Computer Architecture and Organisation NotesDocument18 pagesComputer Architecture and Organisation NotesVED MISHRANo ratings yet
- Von Neumann Architecture ExplainedDocument8 pagesVon Neumann Architecture ExplainedDinesh KumarNo ratings yet
- COMPUTER ORGANIZATION AND PROCESSING DATADocument11 pagesCOMPUTER ORGANIZATION AND PROCESSING DATAalysonmicheaalaNo ratings yet
- Coa UNIT-1 NotesDocument11 pagesCoa UNIT-1 NotesHarshitha KANKANALANo ratings yet
- Introduction To Computing:: Computer SystemsDocument27 pagesIntroduction To Computing:: Computer SystemsPhan Giang ChâuNo ratings yet
- New Middle East International Schools, Riyadh Grade: 9 Subject: Computer Science Academic Year: 2022-2023Document5 pagesNew Middle East International Schools, Riyadh Grade: 9 Subject: Computer Science Academic Year: 2022-2023agyteNo ratings yet
- What Is A Computer?Document20 pagesWhat Is A Computer?Arpita SrivastavaNo ratings yet
- Chapter1 PDFDocument21 pagesChapter1 PDFSubhabrata DasNo ratings yet
- Sample ChapterDocument16 pagesSample ChapterPreetham SaigalNo ratings yet
- Block Diagram of Digital Computer:: MicroprocessorDocument25 pagesBlock Diagram of Digital Computer:: MicroprocessorRobotrixNo ratings yet
- Computer Architecture (Structural Composition)Document12 pagesComputer Architecture (Structural Composition)Adnan RRRNo ratings yet
- Operating Systems and Computer ArchitectureDocument3 pagesOperating Systems and Computer ArchitectureAhmed HassanNo ratings yet
- Cfo Full NotesDocument48 pagesCfo Full Notessreeja sethuNo ratings yet
- Basics of solar PV system explainedDocument33 pagesBasics of solar PV system explainedjunaidNo ratings yet
- Chapter4 Lecture NotesDocument39 pagesChapter4 Lecture Notesfarahk77737No ratings yet
- Nvidia N11M-GE Intel CPU Auburndale (Dual Core) : PCB LayerDocument58 pagesNvidia N11M-GE Intel CPU Auburndale (Dual Core) : PCB Layerحسن علي نوفلNo ratings yet
- 2018 09 04 02 16 34 DESKTOP-F2L2LRK LogDocument439 pages2018 09 04 02 16 34 DESKTOP-F2L2LRK Logateeq rehmanNo ratings yet
- LPS Series: Operation ManualDocument17 pagesLPS Series: Operation ManualpetrocelliNo ratings yet
- APW8868C: Features General DescriptionDocument26 pagesAPW8868C: Features General DescriptionFelix BlancoNo ratings yet
- Angge - Information Technology Revolution Vid PresentationDocument4 pagesAngge - Information Technology Revolution Vid PresentationAngelika AroganteNo ratings yet
- Eoc4 - PCBDocument1 pageEoc4 - PCBidaNo ratings yet
- User Manual: Smart AcDocument22 pagesUser Manual: Smart AcRemusNo ratings yet
- NXP 8mpluslpd4-Evk QSDocument12 pagesNXP 8mpluslpd4-Evk QSBenyamin Farzaneh AghajarieNo ratings yet
- Weekly Timer With 8x16 Audio Matrix and Mp3: FeaturesDocument2 pagesWeekly Timer With 8x16 Audio Matrix and Mp3: FeaturesBoško VasićNo ratings yet
- BGA T-870A User ManualDocument13 pagesBGA T-870A User ManualLeonard LiuNo ratings yet
- Why Are Command Line Interpreters Used?: Slide 2Document3 pagesWhy Are Command Line Interpreters Used?: Slide 2Sharanya MahapatraNo ratings yet
- Intro To Threads PDFDocument4 pagesIntro To Threads PDFNANDINI BNo ratings yet
- CMOS Inverter VTC Noise Margin AnalysisDocument8 pagesCMOS Inverter VTC Noise Margin AnalysisAyush VatsalNo ratings yet
- Datasheet PiMKRHAT Rev ADocument8 pagesDatasheet PiMKRHAT Rev AZamfirMarianNo ratings yet
- Service Manual: Compact Disc Deck ReceiverDocument20 pagesService Manual: Compact Disc Deck ReceiverManuel lopezNo ratings yet
- CNT FetDocument22 pagesCNT FetRashmi parekhNo ratings yet
- Installing OS & DriversDocument36 pagesInstalling OS & DriversPurificacion, AnabeaNo ratings yet
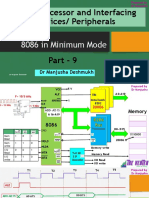
- 8086 in Minimum Mode Part 9Document6 pages8086 in Minimum Mode Part 9vikas chawlaNo ratings yet
- Disassembly & Reassembly PDFDocument10 pagesDisassembly & Reassembly PDFsafi alsafiNo ratings yet
- Untangle Get Started With SD Wan e BookDocument15 pagesUntangle Get Started With SD Wan e BookEko Andri PrasetyoNo ratings yet
- TCD & Terminal Box ConnectionDocument1 pageTCD & Terminal Box ConnectionDANIEL BURILLO HOMBRIANo ratings yet
- Government Polytechnic, Karad: Electronics & Telecommunication EngineeringDocument21 pagesGovernment Polytechnic, Karad: Electronics & Telecommunication EngineeringAmol MahindkarNo ratings yet
- Format For Subjects Experts - ECE 1Document1 pageFormat For Subjects Experts - ECE 1lucky jNo ratings yet
- MC14014B, MC14021B 8 Bit Static Shift Register: Marking DiagramsDocument8 pagesMC14014B, MC14021B 8 Bit Static Shift Register: Marking Diagramsdaniel ortegaNo ratings yet
- Arihant CCC Courses - RemovedDocument138 pagesArihant CCC Courses - RemovedSPEAK UP UniversalNo ratings yet
- Design and Construction of High Voltage Diode 100 KVDocument7 pagesDesign and Construction of High Voltage Diode 100 KVBashir MtwaklNo ratings yet
- ASM QuestionsDocument9 pagesASM QuestionsTKNo ratings yet
- Advanced Power Electronics Corp.: DescriptionDocument5 pagesAdvanced Power Electronics Corp.: DescriptionkalanghoNo ratings yet
- CompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)From EverandCompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Rating: 5 out of 5 stars5/5 (1)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- Computer Science: A Concise IntroductionFrom EverandComputer Science: A Concise IntroductionRating: 4.5 out of 5 stars4.5/5 (14)
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)From EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Rating: 5 out of 5 stars5/5 (2)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Rating: 5 out of 5 stars5/5 (2)
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- Design Recipes for FPGAs: Using Verilog and VHDLFrom EverandDesign Recipes for FPGAs: Using Verilog and VHDLRating: 2 out of 5 stars2/5 (1)
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxFrom EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNo ratings yet
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- Samsung Galaxy S20 Learners Guide: A Comprehensive Manual to Help You Master Your Samsung Galaxy S20 and S20 Series like a ProFrom EverandSamsung Galaxy S20 Learners Guide: A Comprehensive Manual to Help You Master Your Samsung Galaxy S20 and S20 Series like a ProNo ratings yet
- Patterns in the Machine: A Software Engineering Guide to Embedded DevelopmentFrom EverandPatterns in the Machine: A Software Engineering Guide to Embedded DevelopmentRating: 5 out of 5 stars5/5 (1)
- Model-based System and Architecture Engineering with the Arcadia MethodFrom EverandModel-based System and Architecture Engineering with the Arcadia MethodNo ratings yet
- Raspberry Pi | 101: The Beginner’s Guide with Basics on Hardware, Software, Programming & ProjecFrom EverandRaspberry Pi | 101: The Beginner’s Guide with Basics on Hardware, Software, Programming & ProjecNo ratings yet
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionFrom EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionRating: 5 out of 5 stars5/5 (2)
- Dancing with Qubits: How quantum computing works and how it can change the worldFrom EverandDancing with Qubits: How quantum computing works and how it can change the worldRating: 5 out of 5 stars5/5 (1)
- Kindle Fire Owner's Manual: The ultimate Kindle Fire guide to getting started, advanced user tips, and finding unlimited free books, videos and apps on Amazon and beyondFrom EverandKindle Fire Owner's Manual: The ultimate Kindle Fire guide to getting started, advanced user tips, and finding unlimited free books, videos and apps on Amazon and beyondRating: 4.5 out of 5 stars4.5/5 (4)
- iPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneFrom EverandiPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)