You might also like
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- Report CssDocument16 pagesReport CssPranav ShirsatNo ratings yet
- Simulation of Pick and Place Robotics System Using Solidworks SoftmotionDocument7 pagesSimulation of Pick and Place Robotics System Using Solidworks SoftmotionSaumya SaxenaNo ratings yet
- A Robotic Automatic Assembly System Based On VisioDocument19 pagesA Robotic Automatic Assembly System Based On VisioXavier Eduardo100% (1)
- Integrated Image Processing and Path Planning For Robotic SketchingDocument6 pagesIntegrated Image Processing and Path Planning For Robotic SketchingĐào Văn HưngNo ratings yet
- COE101-MODULE 1 IntroductionDocument6 pagesCOE101-MODULE 1 IntroductionOliver MedinaNo ratings yet
- Robotics Course Objectives and ApplicationsDocument5 pagesRobotics Course Objectives and ApplicationsN Dhanunjaya Rao BorraNo ratings yet
- Lab Part 03 Homework 01Document12 pagesLab Part 03 Homework 01ឆាម វ៉ាន់នូវNo ratings yet
- Teach Pendant Android MobileDocument3 pagesTeach Pendant Android MobileBhavanarayana ChakkaNo ratings yet
- Design and Development of Robotic Arm For Cutting Tree PDFDocument10 pagesDesign and Development of Robotic Arm For Cutting Tree PDFHamza HebNo ratings yet
- Government Polytechnic Nandurbar: Maharashtra State Board of Technical EducationDocument15 pagesGovernment Polytechnic Nandurbar: Maharashtra State Board of Technical EducationDev MaratheNo ratings yet
- JETIRFA06001Document5 pagesJETIRFA06001Trần ĐạtNo ratings yet
- COPPELIASIMDocument7 pagesCOPPELIASIMRooban SNo ratings yet
- Shadow RobotDocument29 pagesShadow Robotteentalksopedia100% (1)
- Mohammed 2013Document17 pagesMohammed 2013FiandjafarNo ratings yet
- 3 Degree of Freedom Robotic Arm for PickupDocument14 pages3 Degree of Freedom Robotic Arm for Pickuprishikesh badveNo ratings yet
- ROBOTIC ARM GIVEN A THREE DEGREE OF FREEDOMDocument28 pagesROBOTIC ARM GIVEN A THREE DEGREE OF FREEDOMEmmanuel OmaleNo ratings yet
- Worker'S Assistant Robot Using Myrio and Labview: April 2019Document6 pagesWorker'S Assistant Robot Using Myrio and Labview: April 2019chuyen truongNo ratings yet
- Wirelessroboticarm Vehicle: P. V. Rama Raju, G. Naga Raju, K. Venkat Vinay, M. Anil Kumar, K. Naga Manju, K. ManojDocument4 pagesWirelessroboticarm Vehicle: P. V. Rama Raju, G. Naga Raju, K. Venkat Vinay, M. Anil Kumar, K. Naga Manju, K. ManojNaga Raju GNo ratings yet
- ScaraDocument9 pagesScaraSalvatore VillaniNo ratings yet
- Literature Reviewon Designand Simulationof Industrial Robotic Armusing CADCAMSoftwareDocument4 pagesLiterature Reviewon Designand Simulationof Industrial Robotic Armusing CADCAMSoftwareSamuel AbraghamNo ratings yet
- AMP Microproject CoDocument23 pagesAMP Microproject CovvppolycoNo ratings yet
- Line Following Robot ResearchDocument4 pagesLine Following Robot ResearchtherealslimNo ratings yet
- Multipurpose Robotic ArmDocument7 pagesMultipurpose Robotic ArmIJRASETPublicationsNo ratings yet
- A Review On AI Vision Robotic Arm Using Raspberry PiDocument7 pagesA Review On AI Vision Robotic Arm Using Raspberry PiIJRASETPublicationsNo ratings yet
- Implementation of Line Follower Robot Based Microcontroller Atmega32ADocument5 pagesImplementation of Line Follower Robot Based Microcontroller Atmega32AAhuja ShivamNo ratings yet
- Computer Vision Based Robotic Arm Controlled Using Interactive GUIDocument18 pagesComputer Vision Based Robotic Arm Controlled Using Interactive GUIArief HazwanNo ratings yet
- Design and Development of Robotic With 4-Degree of Freedom: Imayam College of EngineeringDocument14 pagesDesign and Development of Robotic With 4-Degree of Freedom: Imayam College of EngineeringvinothkumarNo ratings yet
- Best Ref PaperDocument25 pagesBest Ref PaperKanna MonishNo ratings yet
- RoboticsDocument32 pagesRoboticsNimmagaddadeepakNo ratings yet
- ESME Tadele B. Tuli and Tesfaye O. TerefeDocument9 pagesESME Tadele B. Tuli and Tesfaye O. TerefeTesfayeNo ratings yet
- Senior Design Final ReportDocument39 pagesSenior Design Final ReportAndrew SackNo ratings yet
- Pick & Place Robot Arm ControlDocument14 pagesPick & Place Robot Arm ControlAkshay byp100% (1)
- Industrial Robotic Arm Report SummaryDocument19 pagesIndustrial Robotic Arm Report SummaryKshitij BandarNo ratings yet
- Pick and place robot automation trainer industrial motion control and visionDocument1 pagePick and place robot automation trainer industrial motion control and visionMovie WorldNo ratings yet
- Ijsetr Vol 6 Issue 12 1568 1573Document7 pagesIjsetr Vol 6 Issue 12 1568 1573Siddhartha PvpNo ratings yet
- Introduction To Industrial RoboticsDocument5 pagesIntroduction To Industrial RoboticsJava TechNo ratings yet
- Industrial RobotDocument14 pagesIndustrial RobotAbdo HeshamNo ratings yet
- XXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64Document12 pagesXXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64HRITHIK POOJARYNo ratings yet
- MD Husamuddin (20 6609)Document23 pagesMD Husamuddin (20 6609)nphotographer99No ratings yet
- Robot Soccer A Platform For Systems EngineeringDocument10 pagesRobot Soccer A Platform For Systems EngineeringglumarkNo ratings yet
- Design and Development of a 6-DOF Pick and Place Robotic ArmDocument7 pagesDesign and Development of a 6-DOF Pick and Place Robotic ArmAravindNo ratings yet
- Fabricating A Completely Assemblable Robotic ArmDocument19 pagesFabricating A Completely Assemblable Robotic ArmshanthiniNo ratings yet
- Robot Manipulators Trends and DevelopmentDocument676 pagesRobot Manipulators Trends and DevelopmentJosé Ramírez100% (1)
- Yantra: Shaping the Future with Industrial, Service and Autonomous RobotsDocument21 pagesYantra: Shaping the Future with Industrial, Service and Autonomous RobotsAliasKevin KunjuNo ratings yet
- Robotic ArmDocument9 pagesRobotic ArmRohit KumarNo ratings yet
- Research PaperDocument11 pagesResearch PaperIshan BhargaveNo ratings yet
- A Review On Robotic Arm Vehicle With Object and Facial RecognitionDocument7 pagesA Review On Robotic Arm Vehicle With Object and Facial RecognitionijrasetNo ratings yet
- R202042D Project Proposal 4.1 B CHIMUSODocument9 pagesR202042D Project Proposal 4.1 B CHIMUSOnyashaNo ratings yet
- Automatic Work Piece Inspection Cum Counter ConveyorDocument10 pagesAutomatic Work Piece Inspection Cum Counter ConveyorIJRASETPublicationsNo ratings yet
- Q2. What Is Robot? What Are The Laws of Robot?Document5 pagesQ2. What Is Robot? What Are The Laws of Robot?Ashikur RahmanNo ratings yet
- Human-Robot Collaboration in Manufacturing Applications - A ReviewDocument25 pagesHuman-Robot Collaboration in Manufacturing Applications - A ReviewPiyumal SamarathungaNo ratings yet
- Kinematic Analysis of 6 DOF Articulated Robotic ArmDocument5 pagesKinematic Analysis of 6 DOF Articulated Robotic ArmRoman MorozovNo ratings yet
- Futech2024 03 01 03 +princewillDocument7 pagesFutech2024 03 01 03 +princewillNIKHIL ASNo ratings yet
- AN044 Robotic ArmDocument9 pagesAN044 Robotic Armhussien amare100% (1)
- Design and Implementation of Real-Time Robot Operating System Based On FreertosDocument7 pagesDesign and Implementation of Real-Time Robot Operating System Based On FreertosThiago Alberto Ramos GabrielNo ratings yet
- Pick and Place Robotic Arm Using Arduino: December 2017Document7 pagesPick and Place Robotic Arm Using Arduino: December 2017visionNo ratings yet
- Industrial RobotsDocument32 pagesIndustrial Robotsclaudiu feier50% (2)
- Foreign 2Document8 pagesForeign 2Rhodora A. BorjaNo ratings yet
- 2013IGIGlobal RoboticGrippersGraspingandGraspPlanningDocument33 pages2013IGIGlobal RoboticGrippersGraspingandGraspPlanningNavy FanasticNo ratings yet
- Final_Project - Wokwi ESP32, STM32, Arduino Simulator-2Document1 pageFinal_Project - Wokwi ESP32, STM32, Arduino Simulator-2NIKHIL ASNo ratings yet
- 03_COLLOBRATIVE ROBOT FOR INDUSTRIAL APPLICATION_ProcessingFeeDocument1 page03_COLLOBRATIVE ROBOT FOR INDUSTRIAL APPLICATION_ProcessingFeeNIKHIL ASNo ratings yet
- KSCT PROJECT PROPOSALDocument7 pagesKSCT PROJECT PROPOSALNIKHIL ASNo ratings yet
- IV-II PLC Lab ManualDocument46 pagesIV-II PLC Lab ManualNIKHIL ASNo ratings yet
- Automative Electronics and Hybrid VehicleDocument34 pagesAutomative Electronics and Hybrid VehicleNIKHIL ASNo ratings yet
- Lecture 19Document3 pagesLecture 19NIKHIL ASNo ratings yet
- How To Submit Interest in Skill HubDocument2 pagesHow To Submit Interest in Skill HubNIKHIL AS100% (1)
- PreviewpdfDocument49 pagesPreviewpdfNIKHIL ASNo ratings yet
- Brief Note On Student PassDocument2 pagesBrief Note On Student PassSneha Sneha dollyNo ratings yet
- 18MT72 Jan Feb 2023Document3 pages18MT72 Jan Feb 2023NIKHIL ASNo ratings yet
- Power Electronics VivaDocument7 pagesPower Electronics VivaAbhay Shankar Bharadwaj100% (1)
- Karnataka Robotics Course OutlineDocument10 pagesKarnataka Robotics Course OutlineNIKHIL ASNo ratings yet
- GSM Hardware Architecture Seminar ReportDocument13 pagesGSM Hardware Architecture Seminar ReportNIKHIL ASNo ratings yet
- FRA2020b DesigninginterconnectedhapticinterfacesDocument22 pagesFRA2020b DesigninginterconnectedhapticinterfacesNIKHIL ASNo ratings yet
- 2.industrial ElectronicsDocument12 pages2.industrial ElectronicsNIKHIL ASNo ratings yet
- 6.CAD LabDocument5 pages6.CAD LabNIKHIL ASNo ratings yet
- Ni Lab PrintsDocument23 pagesNi Lab PrintsNIKHIL ASNo ratings yet
- 5.python-Programming LabDocument7 pages5.python-Programming LabNIKHIL ASNo ratings yet
- 6.in Plant TrainingDocument5 pages6.in Plant TrainingNIKHIL ASNo ratings yet
- Microcontroller Lab Course GuideDocument7 pagesMicrocontroller Lab Course GuideNIKHIL ASNo ratings yet
- DEPARTMENT OF MECHATRONICS ENGINEERING EditedDocument11 pagesDEPARTMENT OF MECHATRONICS ENGINEERING EditedNIKHIL ASNo ratings yet
- 3 (B) .Automotive Electronics (Elective)Document10 pages3 (B) .Automotive Electronics (Elective)NIKHIL ASNo ratings yet
- 7.project work-II On Design of Mechatronics System and Industrial VisitsDocument7 pages7.project work-II On Design of Mechatronics System and Industrial VisitsNIKHIL ASNo ratings yet
- 5.industrial Electronics and DAS LabDocument5 pages5.industrial Electronics and DAS LabNIKHIL ASNo ratings yet
- 4.CNC and Robotics LabDocument5 pages4.CNC and Robotics LabNIKHIL ASNo ratings yet
- How To PayDocument3 pagesHow To PayNIKHIL ASNo ratings yet
- MST PPT1Document18 pagesMST PPT1NIKHIL ASNo ratings yet
- Module-4 - Balancing of Rotating MassesDocument46 pagesModule-4 - Balancing of Rotating MassesNIKHIL ASNo ratings yet
- 3 (A) - Medical Electronics (Elective)Document11 pages3 (A) - Medical Electronics (Elective)NIKHIL ASNo ratings yet
- Python Lab PrintsDocument9 pagesPython Lab PrintsNIKHIL ASNo ratings yet
- P200(2页)Document2 pagesP200(2页)guwniarzykNo ratings yet
- CobotsDocument12 pagesCobotsWaleedNo ratings yet
- Collaborative Robot Function Operator Manual B-83744EN 04 Robo ChallengeDocument90 pagesCollaborative Robot Function Operator Manual B-83744EN 04 Robo ChallengeMorariu TimiNo ratings yet
- Digital Technology Enablers and Their Implications For Supply Chain ManagementDocument16 pagesDigital Technology Enablers and Their Implications For Supply Chain Management7dk6495zjgNo ratings yet
- Hanwha Precision Machinery | Robotics Company ProfileDocument33 pagesHanwha Precision Machinery | Robotics Company ProfileAmilcar CoutoNo ratings yet
- Viper 650/850 Robot With eMB-60R: User's GuideDocument148 pagesViper 650/850 Robot With eMB-60R: User's GuideEDUARDO PERFECTONo ratings yet
- Cobots or Collaborative RobotsDocument2 pagesCobots or Collaborative RobotsGiovan George MendezNo ratings yet
- An Engineer's Guide To Industrial Robot Designs: E-BookDocument20 pagesAn Engineer's Guide To Industrial Robot Designs: E-BookAHMED ghribiNo ratings yet
- Cobot Programming For Collaborative Industrial Tasks: An OverviewDocument37 pagesCobot Programming For Collaborative Industrial Tasks: An OverviewSayantan RahaNo ratings yet
- PRACTICE TEST 4 - SsDocument4 pagesPRACTICE TEST 4 - SsVương Nguyễn QuốcNo ratings yet
- Case Study Transport ManagementDocument6 pagesCase Study Transport ManagementZakwan HaziqNo ratings yet
- Gigabit Magazine TruePDF-January 2020 PDFDocument202 pagesGigabit Magazine TruePDF-January 2020 PDFm NNo ratings yet
- Kine Record1Document39 pagesKine Record1Abdul AneesNo ratings yet
- Ijsred V5i3p21Document11 pagesIjsred V5i3p21Samuel AbraghamNo ratings yet
- Whitepaper Human-Robot-Collaboration Pilz enDocument15 pagesWhitepaper Human-Robot-Collaboration Pilz enAlejandro Salas VásquezNo ratings yet
- Collaborative Robots Comparison Chart - Collaborative Robotics TrendsDocument3 pagesCollaborative Robots Comparison Chart - Collaborative Robotics TrendsKanna MonishNo ratings yet
- Impact of Human-Robot Collaboration in The Automotive IndustryDocument8 pagesImpact of Human-Robot Collaboration in The Automotive IndustryInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Lineup E 220418Document10 pagesLineup E 220418Ihcene BoudaliNo ratings yet
- Assignment 01Document6 pagesAssignment 01Unknowen NumberNo ratings yet
- 05 ISO TS15066 StatusDocument23 pages05 ISO TS15066 StatusThiago SaldanhaNo ratings yet
- Robots, Cobots To Revolutionize Automotive ManufacturingDocument10 pagesRobots, Cobots To Revolutionize Automotive ManufacturingjchikeshNo ratings yet
- Mechatronics and Robotics in Mechanical Engineering: Integration of SystemsDocument20 pagesMechatronics and Robotics in Mechanical Engineering: Integration of SystemsismailayarNo ratings yet
- 1 s2.0 S0360835223002863 MainDocument22 pages1 s2.0 S0360835223002863 MainFranzola FranNo ratings yet
- Paper Cobot 4Document8 pagesPaper Cobot 4Jessica NovitaNo ratings yet
- COBOTS - Universal RobotsDocument13 pagesCOBOTS - Universal RobotsJorge_Andril_5370No ratings yet
- IFR Robots and The Workplace of The Future Positioning PaperDocument36 pagesIFR Robots and The Workplace of The Future Positioning Papermanzur136No ratings yet
- Digital Twins For Collaborative RobotsDocument16 pagesDigital Twins For Collaborative RobotsVăn Toàn TăngNo ratings yet
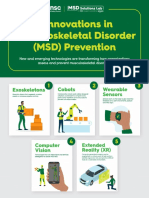
- MSD PreventionDocument6 pagesMSD PreventionParanikumar JayakumarNo ratings yet
- RCR 35ia (E) 02aDocument2 pagesRCR 35ia (E) 02apc100xohmNo ratings yet