You might also like
- Safety Systems For The Oil and Gas Industrial Facilities - Design, Maintenance Policy Choice, and Crew SchedulingDocument15 pagesSafety Systems For The Oil and Gas Industrial Facilities - Design, Maintenance Policy Choice, and Crew SchedulingEsron Hadinata Lumban GaolNo ratings yet
- Case Study-Automation in ManufacturingDocument14 pagesCase Study-Automation in ManufacturingRohitNo ratings yet
- Cloud MFG PaperDocument10 pagesCloud MFG Papervikas choubeyNo ratings yet
- Machine LerningDocument15 pagesMachine LerningFadly SaputraNo ratings yet
- Automation in Construction: ReviewDocument20 pagesAutomation in Construction: ReviewDieguizNo ratings yet
- Artificial Lift System Optimization Using Machine Learning ApplicationsDocument8 pagesArtificial Lift System Optimization Using Machine Learning ApplicationsALBERTO MADRIGAL MAGAÑANo ratings yet
- AM Using RobotsDocument13 pagesAM Using RobotsNhung Nguyễn HồngNo ratings yet
- A Functional Description of AutomationDocument7 pagesA Functional Description of AutomationShyam KrishnanNo ratings yet
- International Journal of Industrial Ergonomics: A A B ADocument10 pagesInternational Journal of Industrial Ergonomics: A A B AViola IndiraNo ratings yet
- Applsci 13 07418Document25 pagesApplsci 13 074188608703No ratings yet
- 1 s2.0 S2212827118312344 MainDocument6 pages1 s2.0 S2212827118312344 MainRajeevNo ratings yet
- Updated Brochure FPMM 2022Document2 pagesUpdated Brochure FPMM 2022sieausNo ratings yet
- IEEE-Neuroscience-Inspired Algorithms For The Predictive Maintenance of Manufacturing SystemsDocument11 pagesIEEE-Neuroscience-Inspired Algorithms For The Predictive Maintenance of Manufacturing SystemsWeiwei ChenNo ratings yet
- Engineering: Research Additive Manufacturing-ReviewDocument9 pagesEngineering: Research Additive Manufacturing-Reviewuday vermaNo ratings yet
- Addressing Diverse Petroleum Industry Problems Using Machine Learning Techniques - Literary Methodology-Spotlight On Predicting Well Integrity Failures - PMCDocument29 pagesAddressing Diverse Petroleum Industry Problems Using Machine Learning Techniques - Literary Methodology-Spotlight On Predicting Well Integrity Failures - PMCcontactsameer541No ratings yet
- Cirp Annals - Manufacturing TechnologyDocument6 pagesCirp Annals - Manufacturing TechnologyAvinash KumarNo ratings yet
- Atefeh B 2013 - Robust Supply ChainDocument17 pagesAtefeh B 2013 - Robust Supply ChainendorphonicNo ratings yet
- Dependability Assessment of Large RailwaDocument6 pagesDependability Assessment of Large RailwaRubenNo ratings yet
- Supply Chain Implications of Concurrent EngineeringDocument33 pagesSupply Chain Implications of Concurrent EngineeringRovi HanafiNo ratings yet
- Robotics and Computer Integrated ManufacturingDocument11 pagesRobotics and Computer Integrated ManufacturingIrfan IsdhiantoNo ratings yet
- 1 s2.0 S0079642521001420 MainDocument43 pages1 s2.0 S0079642521001420 MainOğuzhan DündarNo ratings yet
- Cognitive Work Analysis To Comprehend Operations ADocument5 pagesCognitive Work Analysis To Comprehend Operations ADesianafitri anggraini14No ratings yet
- Computers & Industrial Engineering: A A B C C D e eDocument14 pagesComputers & Industrial Engineering: A A B C C D e eSonal KaliaNo ratings yet
- ModularPlants 2016Document36 pagesModularPlants 2016harshad100% (1)
- A Living Lab Platform For Testing Additive Manufacturing Agent-Based Manufacturing StrategiesDocument6 pagesA Living Lab Platform For Testing Additive Manufacturing Agent-Based Manufacturing StrategiesTommy AnggiawanNo ratings yet
- Digital Twin in Electrical Machine ContrDocument26 pagesDigital Twin in Electrical Machine ContrSyed Abdul Qadir GilaniNo ratings yet
- Supply Chain Improvement in Construction IndustryDocument8 pagesSupply Chain Improvement in Construction IndustryMade Adi WidyatmikaNo ratings yet
- Machines 10 01137 v3Document43 pagesMachines 10 01137 v3qw BastiaNo ratings yet
- Paper On Evolution of Maintenance For FEAST On EITAC 2018 Conference - Eyoh Jerry1Document10 pagesPaper On Evolution of Maintenance For FEAST On EITAC 2018 Conference - Eyoh Jerry1Mohammad NajibullahNo ratings yet
- Jurnal 2023 - A Review On Automation and Robotic Technology in Construction IndustryDocument5 pagesJurnal 2023 - A Review On Automation and Robotic Technology in Construction IndustryyulfaNo ratings yet
- V3.sia1 - .25.analysis and Design Updation of Aerial Monocable Ropeway Conveyors For Eliminating Recurring Failures and DowntimesDocument12 pagesV3.sia1 - .25.analysis and Design Updation of Aerial Monocable Ropeway Conveyors For Eliminating Recurring Failures and DowntimesTarunNo ratings yet
- A Framework For Assessing Maturity and Readiness Towards Industrialized Construction 2020Document9 pagesA Framework For Assessing Maturity and Readiness Towards Industrialized Construction 2020goodtechpro448199No ratings yet
- 1 s2.0 S2214785320358922 MainDocument11 pages1 s2.0 S2214785320358922 MainGuilherme SampaioNo ratings yet
- International Journal of Mining Science and Technology: H. Abbaspour, C. Drebenstedt, M. Badroddin, A. MaghaminikDocument10 pagesInternational Journal of Mining Science and Technology: H. Abbaspour, C. Drebenstedt, M. Badroddin, A. MaghaminikZaché le JusteNo ratings yet
- 1 s2.0 S2212827123000057 MainDocument6 pages1 s2.0 S2212827123000057 MainMarlon Wesley Machado CunicoNo ratings yet
- Identifying The Challenges To Adopting Robotics in The US Construction IndustryDocument10 pagesIdentifying The Challenges To Adopting Robotics in The US Construction IndustryJin Ho KoNo ratings yet
- Selection OptDocument6 pagesSelection OptBharanidharan VeeraNo ratings yet
- Conferenceformat Finalversion12Document8 pagesConferenceformat Finalversion12Projetos MecanicosNo ratings yet
- Block Chain Scada Quality Control For in Industrial AutomationDocument6 pagesBlock Chain Scada Quality Control For in Industrial AutomationIJRASETPublicationsNo ratings yet
- Applying SensorBased Information Systems To Identify Unplanned Downtime in Mining Machinery OperationSensorsDocument18 pagesApplying SensorBased Information Systems To Identify Unplanned Downtime in Mining Machinery OperationSensorsLucia QuispeNo ratings yet
- Machines 12 00180Document36 pagesMachines 12 00180jamel-shamsNo ratings yet
- Mine Production Index (MPI) - Extension of OEE For Bottleneck Detection in MiningDocument8 pagesMine Production Index (MPI) - Extension of OEE For Bottleneck Detection in Miningmohammad alimohammadi saniNo ratings yet
- Accenture Report 2010Document12 pagesAccenture Report 2010PepeLeTvorNo ratings yet
- Evolution of Maintenance StrategiesDocument10 pagesEvolution of Maintenance StrategiesmusaveerNo ratings yet
- A Novel Machine Learning Model For Autonomous AnalysisDocument21 pagesA Novel Machine Learning Model For Autonomous AnalysisuamirandaNo ratings yet
- A Review of Machine Learning Applications in Additive ManufacturingDocument11 pagesA Review of Machine Learning Applications in Additive ManufacturingEsaú RojasNo ratings yet
- A Deep Learning-Based Approach For Forecasting Off-Gas Production and Consumption in The Blast FurnaceDocument13 pagesA Deep Learning-Based Approach For Forecasting Off-Gas Production and Consumption in The Blast FurnaceKamran MujahidNo ratings yet
- Bab Ice Anu 2006Document21 pagesBab Ice Anu 2006IslamSharafNo ratings yet
- Coatings 12 00565Document25 pagesCoatings 12 00565guerguerNo ratings yet
- Supply Chain Network Design Using An Integrated NeDocument9 pagesSupply Chain Network Design Using An Integrated Nevinhnhan1847No ratings yet
- Automation in Construction: Vahid Asghari, Shu-Chien HsuDocument17 pagesAutomation in Construction: Vahid Asghari, Shu-Chien HsuPablo CartesNo ratings yet
- Automation in Construction: SciencedirectDocument23 pagesAutomation in Construction: SciencedirectPutri DewintariNo ratings yet
- NPP Site Selection: A Systems Engineering Approach: June 2013Document10 pagesNPP Site Selection: A Systems Engineering Approach: June 2013tanvir hasanNo ratings yet
- SMSLandscape CASE2015Document9 pagesSMSLandscape CASE2015Leonardo DanielliNo ratings yet
- Nagar 2021Document7 pagesNagar 2021ANKUSH SINHANo ratings yet
- Use of Artificial Intelligence Systems in The Metallurgical Industry (Survey)Document8 pagesUse of Artificial Intelligence Systems in The Metallurgical Industry (Survey)Manojlovic VasoNo ratings yet
- Application of Failure Mode Effect and Criticality Analysis (FMECA) To A Computer Integrated Manufacturing (CIM) Conveyor BeltDocument6 pagesApplication of Failure Mode Effect and Criticality Analysis (FMECA) To A Computer Integrated Manufacturing (CIM) Conveyor BeltApd RazzoukNo ratings yet
- WCECS2009 pp393-398Document9 pagesWCECS2009 pp393-398Md Saidur RahmanNo ratings yet
- Electronics 11 01555 v2Document14 pagesElectronics 11 01555 v2Idha AprianNo ratings yet
- Model-Based Technical Planning An Evaluation of deDocument19 pagesModel-Based Technical Planning An Evaluation of deNtokozo NdalaNo ratings yet
- What Is Engineering Asset ManagementDocument16 pagesWhat Is Engineering Asset ManagementNtokozo NdalaNo ratings yet
- Recent Developments of The Modelica "Buildings" Library For Building Energy and Control SystemsDocument11 pagesRecent Developments of The Modelica "Buildings" Library For Building Energy and Control SystemsNtokozo NdalaNo ratings yet
- Research On The Development of Three-Dimensional VDocument4 pagesResearch On The Development of Three-Dimensional VNtokozo NdalaNo ratings yet
- Ib 1800R App PDFDocument152 pagesIb 1800R App PDFMiloud ZAAFOURNo ratings yet
- Final Year Project ThesisDocument25 pagesFinal Year Project ThesisIam MuntakaNo ratings yet
- Actimize FMC SP 4 - 2 - 0 Solution Guide PDFDocument285 pagesActimize FMC SP 4 - 2 - 0 Solution Guide PDFgoyalshreyaNo ratings yet
- Delivery Release TIA Portal V15Document6 pagesDelivery Release TIA Portal V15Giovanni JacintoNo ratings yet
- Teacher Resources Power Up 5Document88 pagesTeacher Resources Power Up 5Benjamin100% (12)
- Crusin For A Bluesin (Blair) - PDFDocument7 pagesCrusin For A Bluesin (Blair) - PDFpaul wightNo ratings yet
- GD1B Block Diagram: Crestline Ati M64Document35 pagesGD1B Block Diagram: Crestline Ati M64Paulo chagas paulo ratoNo ratings yet
- Wisp Clus18 Cisco SD WanDocument40 pagesWisp Clus18 Cisco SD Wandeltakio@gmail.comNo ratings yet
- What Is PCS 7 - Siemens DCS Control SystemDocument11 pagesWhat Is PCS 7 - Siemens DCS Control SystemRaja MugilanNo ratings yet
- BNCV MTX Design Pack RevaDocument5 pagesBNCV MTX Design Pack RevaAnjali TiwariNo ratings yet
- International Journal of Business and Management Invention (IJBMI)Document3 pagesInternational Journal of Business and Management Invention (IJBMI)inventionjournalsNo ratings yet
- React Developer: Nanodegree Program SyllabusDocument12 pagesReact Developer: Nanodegree Program Syllabusɪꜱᴍɪʟᴇʏ.No ratings yet
- Dashboard: 9 Box Grid Talent ManagementDocument18 pagesDashboard: 9 Box Grid Talent ManagementANA GABRIELA CEPEDA SANCHEZNo ratings yet
- SKN3022 Process Instrumentation: DR Saharudin Haron Hanizam SulaimanDocument22 pagesSKN3022 Process Instrumentation: DR Saharudin Haron Hanizam SulaimanAya AmirNo ratings yet
- Da Annex 2021-10-02Document18 pagesDa Annex 2021-10-02PaulNo ratings yet
- Asif Bin Karim: Career ObjectiveDocument4 pagesAsif Bin Karim: Career ObjectiveMH 108812No ratings yet
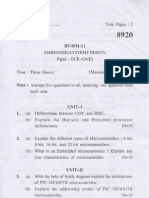
- Embedded System DesignDocument2 pagesEmbedded System DesignBharat KhanejaNo ratings yet
- Shivam Joshi ResumeDocument1 pageShivam Joshi ResumeShivam joshiNo ratings yet
- IOS App Issues DetailsDocument2 pagesIOS App Issues DetailsLore blogNo ratings yet
- The Complete List of Windows 7 ShortcutsDocument30 pagesThe Complete List of Windows 7 ShortcutsmsbeverlyNo ratings yet
- Personas - A Simple IntroductionDocument17 pagesPersonas - A Simple IntroductionSandersNo ratings yet
- Gen. Math TestDocument5 pagesGen. Math TestAlfred LabadorNo ratings yet
- Trusted Systems, Firewalls, Intrusion Detection SystemsDocument18 pagesTrusted Systems, Firewalls, Intrusion Detection SystemsMukesh100% (34)
- Ricoh Pro C751 BrochureDocument8 pagesRicoh Pro C751 BrochureManager SupportNo ratings yet
- CN QuantumDocument188 pagesCN QuantumPriyansh Gupta67% (3)
- Group 5 CIA 3BDocument27 pagesGroup 5 CIA 3BHT SøurâvNo ratings yet
- CS312 HandoutsDocument101 pagesCS312 Handoutsfarhanahmadani008No ratings yet
- Reflection For Learning Mathematics Using Math SongDocument19 pagesReflection For Learning Mathematics Using Math SongMedina RendaniNo ratings yet
- Images - BingDocument2 pagesImages - BingAwais NadeemNo ratings yet
- Cleaning Dirty Data With Pandas & PythonDocument11 pagesCleaning Dirty Data With Pandas & Pythonkoko100% (1)
- Microsoft Teams Guide for Success: Mastering Communication, Collaboration, and Virtual Meetings with Colleagues & ClientsFrom EverandMicrosoft Teams Guide for Success: Mastering Communication, Collaboration, and Virtual Meetings with Colleagues & ClientsRating: 5 out of 5 stars5/5 (5)
- Microsoft Outlook Guide to Success: Learn Smart Email Practices and Calendar Management for a Smooth Workflow [II EDITION]From EverandMicrosoft Outlook Guide to Success: Learn Smart Email Practices and Calendar Management for a Smooth Workflow [II EDITION]Rating: 5 out of 5 stars5/5 (5)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Microsoft Word Guide for Success: From Basics to Brilliance in Achieving Faster and Smarter Results [II EDITION]From EverandMicrosoft Word Guide for Success: From Basics to Brilliance in Achieving Faster and Smarter Results [II EDITION]Rating: 5 out of 5 stars5/5 (5)
- Master Your Data with Power Query in Excel and Power BI: Leveraging Power Query to Get & Transform Your Task FlowFrom EverandMaster Your Data with Power Query in Excel and Power BI: Leveraging Power Query to Get & Transform Your Task FlowRating: 5 out of 5 stars5/5 (5)
- Product Operations: How successful companies build better products at scaleFrom EverandProduct Operations: How successful companies build better products at scaleNo ratings yet
- Scrum: Understanding Scrum at a Deeper Level and Mastering Agile Project ManagementFrom EverandScrum: Understanding Scrum at a Deeper Level and Mastering Agile Project ManagementRating: 3.5 out of 5 stars3.5/5 (2)
- Microsoft OneNote Guide to Success: Learn In A Guided Way How To Take Digital Notes To Optimize Your Understanding, Tasks, And Projects, Surprising Your Colleagues And ClientsFrom EverandMicrosoft OneNote Guide to Success: Learn In A Guided Way How To Take Digital Notes To Optimize Your Understanding, Tasks, And Projects, Surprising Your Colleagues And ClientsRating: 5 out of 5 stars5/5 (3)
- Agile Metrics in Action: How to measure and improve team performanceFrom EverandAgile Metrics in Action: How to measure and improve team performanceNo ratings yet
- Microsoft Excel Guide for Success: Transform Your Work with Microsoft Excel, Unleash Formulas, Functions, and Charts to Optimize Tasks and Surpass Expectations [II EDITION]From EverandMicrosoft Excel Guide for Success: Transform Your Work with Microsoft Excel, Unleash Formulas, Functions, and Charts to Optimize Tasks and Surpass Expectations [II EDITION]Rating: 5 out of 5 stars5/5 (3)
- Microsoft PowerPoint Guide for Success: Learn in a Guided Way to Create, Edit & Format Your Presentations Documents to Visual Explain Your Projects & Surprise Your Bosses And Colleagues | Big Four Consulting Firms MethodFrom EverandMicrosoft PowerPoint Guide for Success: Learn in a Guided Way to Create, Edit & Format Your Presentations Documents to Visual Explain Your Projects & Surprise Your Bosses And Colleagues | Big Four Consulting Firms MethodRating: 5 out of 5 stars5/5 (5)
- Optimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesFrom EverandOptimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesNo ratings yet
- Fundamentals of Data Engineering: Plan and Build Robust Data SystemsFrom EverandFundamentals of Data Engineering: Plan and Build Robust Data SystemsRating: 5 out of 5 stars5/5 (1)
- Sweet Spot UX: Communicating User Experience to Stakeholders, Decision Makers and Other HumansFrom EverandSweet Spot UX: Communicating User Experience to Stakeholders, Decision Makers and Other HumansRating: 4.5 out of 5 stars4.5/5 (5)
- Notion for Beginners: Notion for Work, Play, and ProductivityFrom EverandNotion for Beginners: Notion for Work, Play, and ProductivityRating: 4 out of 5 stars4/5 (8)
- Excel Formulas That Automate Tasks You No Longer Have Time ForFrom EverandExcel Formulas That Automate Tasks You No Longer Have Time ForRating: 5 out of 5 stars5/5 (1)
- Microsoft Power Platform A Deep Dive: Dig into Power Apps, Power Automate, Power BI, and Power Virtual Agents (English Edition)From EverandMicrosoft Power Platform A Deep Dive: Dig into Power Apps, Power Automate, Power BI, and Power Virtual Agents (English Edition)No ratings yet
- Microsoft Excel Formulas: Master Microsoft Excel 2016 Formulas in 30 daysFrom EverandMicrosoft Excel Formulas: Master Microsoft Excel 2016 Formulas in 30 daysRating: 4 out of 5 stars4/5 (7)
- Designing Data-Intensive Applications: The Big Ideas Behind Reliable, Scalable, and Maintainable SystemsFrom EverandDesigning Data-Intensive Applications: The Big Ideas Behind Reliable, Scalable, and Maintainable SystemsRating: 5 out of 5 stars5/5 (6)
- A Modern Enterprise Architecture Approach: Enterprise ArchitectureFrom EverandA Modern Enterprise Architecture Approach: Enterprise ArchitectureRating: 4 out of 5 stars4/5 (3)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- Microservices Patterns: With examples in JavaFrom EverandMicroservices Patterns: With examples in JavaRating: 5 out of 5 stars5/5 (2)
- Design and Build Modern Datacentres, A to Z practical guideFrom EverandDesign and Build Modern Datacentres, A to Z practical guideRating: 3 out of 5 stars3/5 (2)
- Agile Project Management: Scrum for BeginnersFrom EverandAgile Project Management: Scrum for BeginnersRating: 4 out of 5 stars4/5 (7)
- Google Workspace Guide: Unlock Every Google App – Elevate Efficiency with Exclusive Tips, Time-Savers & Step-by-Step Screenshots for Quick MasteryFrom EverandGoogle Workspace Guide: Unlock Every Google App – Elevate Efficiency with Exclusive Tips, Time-Savers & Step-by-Step Screenshots for Quick MasteryRating: 5 out of 5 stars5/5 (5)
- The Ultimate Excel VBA Master: A Complete, Step-by-Step Guide to Becoming Excel VBA Master from ScratchFrom EverandThe Ultimate Excel VBA Master: A Complete, Step-by-Step Guide to Becoming Excel VBA Master from ScratchNo ratings yet
- Microsoft Power Platform Up and Running: Learn to Analyze Data, Create Solutions, Automate Processes, and Develop Virtual Agents with Low Code Programming (English Edition)From EverandMicrosoft Power Platform Up and Running: Learn to Analyze Data, Create Solutions, Automate Processes, and Develop Virtual Agents with Low Code Programming (English Edition)Rating: 5 out of 5 stars5/5 (1)
- The Data and Analytics Playbook: Proven Methods for Governed Data and Analytic QualityFrom EverandThe Data and Analytics Playbook: Proven Methods for Governed Data and Analytic QualityRating: 5 out of 5 stars5/5 (2)
- Ultimate Snowflake Architecture for Cloud Data Warehousing: Architect, Manage, Secure, and Optimize Your Data Infrastructure Using Snowflake for Actionable Insights and Informed Decisions (English Edition)From EverandUltimate Snowflake Architecture for Cloud Data Warehousing: Architect, Manage, Secure, and Optimize Your Data Infrastructure Using Snowflake for Actionable Insights and Informed Decisions (English Edition)No ratings yet