You might also like
- Kalmar Dcg90 180Document12 pagesKalmar Dcg90 180slawny77No ratings yet
- Pile Driver Pressing PileDocument92 pagesPile Driver Pressing Pilegustavo caicedo100% (2)
- RC 1616 Beam Tabulated ReportDocument6 pagesRC 1616 Beam Tabulated Reportperunding thdNo ratings yet
- Amada VIPROS Programming ManualDocument94 pagesAmada VIPROS Programming Manualเกมส์ จารุกิตติ์No ratings yet
- Shaft CalculationDocument4 pagesShaft Calculationksangeeth2000No ratings yet
- Base / Stop: Static Input Data (Beltanalyst™)Document8 pagesBase / Stop: Static Input Data (Beltanalyst™)Rafael MeloNo ratings yet
- Connection 4Document13 pagesConnection 4Der3'am Al m7armehNo ratings yet
- RISA-3D Detail ReportDocument2 pagesRISA-3D Detail ReportMauricio RiquelmeNo ratings yet
- DL Texturing OBA DTY 2023 02 Datasheet Manual enDocument2 pagesDL Texturing OBA DTY 2023 02 Datasheet Manual enOrang BodoNo ratings yet
- Manual Lever and Hoist BlockDocument11 pagesManual Lever and Hoist BlockLuffy11No ratings yet
- (123doc) BTL Ket Cau ThepDocument50 pages(123doc) BTL Ket Cau ThepTrương Ngọc TraiNo ratings yet
- Woo Chang Coupling - 112438 - Paqndr oYtYHS8Document14 pagesWoo Chang Coupling - 112438 - Paqndr oYtYHS8Eng-anwer kadhimNo ratings yet
- Liebherr L 550 G5.1-D LBR Komatsu WA380-6 Caterpillar 950 GC Iiia Bell L1806E Volvo L110FDocument2 pagesLiebherr L 550 G5.1-D LBR Komatsu WA380-6 Caterpillar 950 GC Iiia Bell L1806E Volvo L110FCotizaciones AkbarNo ratings yet
- Thomson Precision Linear Actuators Sep06Document8 pagesThomson Precision Linear Actuators Sep06mattiaNo ratings yet
- Cardan Shaft Catalog From STDocument6 pagesCardan Shaft Catalog From STAHMAD SAIFULLAH100% (1)
- General Section With Shape v2.0Document4 pagesGeneral Section With Shape v2.0pedjaNo ratings yet
- BASEPLATEDocument8 pagesBASEPLATEfrancis sebastian lagamayoNo ratings yet
- Transverse Frame 41 Buckling at Plate Side.: Beams ReportedDocument2 pagesTransverse Frame 41 Buckling at Plate Side.: Beams ReportedEmdadNo ratings yet
- Monninghoff 546 - DatasheetDocument11 pagesMonninghoff 546 - DatasheetirfannadineNo ratings yet
- 546 DatasheetDocument11 pages546 Datasheetwilfredo mercedesNo ratings yet
- Montazni - Stub Rigla T PortalDocument24 pagesMontazni - Stub Rigla T PortalBobanNo ratings yet
- Mot-St - enDocument9 pagesMot-St - encristian.rodriguezNo ratings yet
- 17PS M001VvvDocument1 page17PS M001VvvBen sayari Mohamed AmineNo ratings yet
- CTD8M-1600-12 Synchrochain CarbonDocument1 pageCTD8M-1600-12 Synchrochain CarbonViniciusCamargosNo ratings yet
- Simulation of Start-Stop Shear CycleDocument19 pagesSimulation of Start-Stop Shear CyclesundyaNo ratings yet
- Channel - G-ProfileDocument2 pagesChannel - G-Profilejailani.anwarNo ratings yet
- Akita Chain Block Vit-IiDocument2 pagesAkita Chain Block Vit-Iizahier zakwanNo ratings yet
- DZ1040 - 9 Ring - 20231010123804Document4 pagesDZ1040 - 9 Ring - 20231010123804subhashkumarmandalamcivilNo ratings yet
- Memoria de Cálculo CorreasDocument7 pagesMemoria de Cálculo CorreasAbner Ramos ApazaNo ratings yet
- DRE CAT Stepper Motors CatalogueDocument4 pagesDRE CAT Stepper Motors CatalogueSendi Dika PrasendaNo ratings yet
- Some Aspects On Technological Design of PDFDocument7 pagesSome Aspects On Technological Design of PDFLuis Angel GonzálezNo ratings yet
- Steel Haunch Connection AISC 360-16 A5Document15 pagesSteel Haunch Connection AISC 360-16 A5kheang mengNo ratings yet
- Data Proj 17Document4 pagesData Proj 17Jose FranciscoNo ratings yet
- Connection 2Document19 pagesConnection 2Der3'am Al m7armehNo ratings yet
- XBeam2d 2 ENDocument10 pagesXBeam2d 2 ENAlem LoajnerNo ratings yet
- Lecture 2 - ME460 Renewable Energy ResourcesDocument125 pagesLecture 2 - ME460 Renewable Energy ResourcessaadNo ratings yet
- New - LWH enDocument7 pagesNew - LWH enRodica PuscauNo ratings yet
- CSA S 16-01 Welded ConnectionsDocument308 pagesCSA S 16-01 Welded ConnectionsAnonymous YggO6T6GzNo ratings yet
- KARTY KATALOGOWE CZ-BDocument1 pageKARTY KATALOGOWE CZ-BIreneusz PłusaNo ratings yet
- Planetry GearsDocument10 pagesPlanetry Gearsvinu1175No ratings yet
- AC18-0005 Vend TumbleDryer 25-55lb BrochureDocument4 pagesAC18-0005 Vend TumbleDryer 25-55lb BrochureAdrian PrinadiNo ratings yet
- Mechanisms and Mechanical Vibrations LabDocument13 pagesMechanisms and Mechanical Vibrations Labjawad khalidNo ratings yet
- MiniRail V2Document6 pagesMiniRail V2hepcomotionNo ratings yet
- Conexion NudoDocument18 pagesConexion NudoGUSTAVO GALVAN BADAJOSNo ratings yet
- 175 Own InputDocument8 pages175 Own Inputsantosh kumarNo ratings yet
- 1 BP1Document24 pages1 BP1kheang amgNo ratings yet
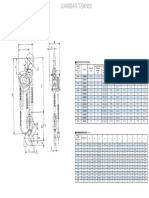
- Geared Trolley 5-10 Ton Gambar TeknisDocument1 pageGeared Trolley 5-10 Ton Gambar TeknisSurya BaihaqiNo ratings yet
- UPE160 To HEA160Document11 pagesUPE160 To HEA160Der3'am Al m7armehNo ratings yet
- Hydraulic WinchDocument4 pagesHydraulic WinchFrancisco MochoNo ratings yet
- Shaft Design - AssignmentDocument1 pageShaft Design - AssignmentSayphone HoungbounyuangNo ratings yet
- Starters Alternators Technical DataDocument10 pagesStarters Alternators Technical DataJoshua SanchezNo ratings yet
- DRAWINGS 1 OPS-WW - Colour Up DeluxeDocument12 pagesDRAWINGS 1 OPS-WW - Colour Up DeluxeantonyasithaNo ratings yet
- Displacement Encoders: Analogue and Digital For Measuring and Positioning For Use With Pneumatic ComponentsDocument9 pagesDisplacement Encoders: Analogue and Digital For Measuring and Positioning For Use With Pneumatic Componentswramadhani65No ratings yet
- Huber Gear BoxDocument2 pagesHuber Gear BoxJOHN0% (1)
- Bearinx® Calculation of Shaft SystemsDocument16 pagesBearinx® Calculation of Shaft Systemsroy 123No ratings yet
- NHA Beam DesignDocument4 pagesNHA Beam DesignEva MarquezNo ratings yet
- Pargola Connection ReportDocument11 pagesPargola Connection ReportRajesh KumarNo ratings yet
- 8fc63d2f f6Document18 pages8fc63d2f f6Chandra MohanNo ratings yet
- SEW - MOVIGEAR DBC-B - ReviseDocument12 pagesSEW - MOVIGEAR DBC-B - Revisemohdazlan hassanNo ratings yet
- 3hac035959 Ps Irb 2600 On Irc5-EnDocument96 pages3hac035959 Ps Irb 2600 On Irc5-EnNguyễn HậuNo ratings yet
- MELSEC iQ-F Series Simple Motion Module FX5-40SSC-S Factory AutomationDocument16 pagesMELSEC iQ-F Series Simple Motion Module FX5-40SSC-S Factory AutomationNguyen QuocNo ratings yet
- NEO M8 FW3 - DataSheet - (UBX 15031086)Document29 pagesNEO M8 FW3 - DataSheet - (UBX 15031086)branko999No ratings yet
- SD1540 00 - en GBDocument5 pagesSD1540 00 - en GBNguyễn HậuNo ratings yet
- TestDocument1 pageTestNguyễn HậuNo ratings yet
- PIC16F887Document288 pagesPIC16F887montri_lpk1728No ratings yet
- 1Document5 pages1Nguyễn HậuNo ratings yet
- Using Using Using Using Using Using Using Using Using Namespace Public Partial Class PublicDocument1 pageUsing Using Using Using Using Using Using Using Using Namespace Public Partial Class PublicNguyễn HậuNo ratings yet
- E7000L Product BrochureDocument8 pagesE7000L Product Brochuredarwin darioNo ratings yet
- Aim and ObjectiveDocument6 pagesAim and ObjectiveSaanvi MalhotraNo ratings yet
- COMPROSSOR, DANFOSS, NLE15KTK2, NLE15KTK2 105H6966, 105H6966, 105H, 6966, 253W, 1 - 3Hp, LBP, R600, 220V - 50, Indesit, Ariston - MBSM DOT PRODocument6 pagesCOMPROSSOR, DANFOSS, NLE15KTK2, NLE15KTK2 105H6966, 105H6966, 105H, 6966, 253W, 1 - 3Hp, LBP, R600, 220V - 50, Indesit, Ariston - MBSM DOT PROCristian Eduardo Cuba GuzmanNo ratings yet
- Me em QB Bat22Document45 pagesMe em QB Bat22Ashrith SaiNo ratings yet
- CHM2 11 - 12 Q3 0702 FDDocument49 pagesCHM2 11 - 12 Q3 0702 FDKim balugayNo ratings yet
- The Activities of The BstiDocument3 pagesThe Activities of The BstisaharudNo ratings yet
- Microwave MeasurementDocument56 pagesMicrowave MeasurementIndraysh Vijay [EC - 76]No ratings yet
- Units of Energy and MassDocument32 pagesUnits of Energy and MassRomisa (Romi) JalaliaslNo ratings yet
- Very Short Answer Questions RAY OPTICS (2 Marks)Document6 pagesVery Short Answer Questions RAY OPTICS (2 Marks)SandilyaNo ratings yet
- Modified Coulomb LawDocument12 pagesModified Coulomb LawMATTiCRUZNo ratings yet
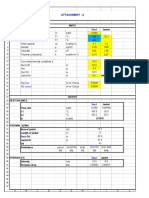
- Att 2Document3 pagesAtt 2pavanNo ratings yet
- Thermodynamics Part 3 NotesDocument52 pagesThermodynamics Part 3 NotesFrancis CometaNo ratings yet
- 2021 DSE Phy Mock Marking SchemeDocument45 pages2021 DSE Phy Mock Marking SchemeDavid LouNo ratings yet
- Question For PracticeDocument18 pagesQuestion For PracticeSwapnajeet JenaNo ratings yet
- Topic 4 Notes (New)Document12 pagesTopic 4 Notes (New)amenaNo ratings yet
- (Unit) Master Ekatalog CMC 2022Document75 pages(Unit) Master Ekatalog CMC 2022Promkes PuskSusut2No ratings yet
- Objective Questions NTDCDocument44 pagesObjective Questions NTDCAdnan AsgharNo ratings yet
- Liquid SolutionDocument16 pagesLiquid SolutionRaju SinghNo ratings yet
- PELTON TurbineDocument8 pagesPELTON TurbineackimNo ratings yet
- Jee-Neet - D30-Nov-2022 AnswerDocument13 pagesJee-Neet - D30-Nov-2022 AnswerDhruvNo ratings yet
- Ecs Txo 2520Document2 pagesEcs Txo 2520miri10861No ratings yet
- PHYS 1100 DC Circuits SolutionsDocument14 pagesPHYS 1100 DC Circuits SolutionsYihun TsegayeNo ratings yet
- Impact of Inductor Current Ringing in DCM On Output Voltage of DC-DC Buck Power ConvertersDocument11 pagesImpact of Inductor Current Ringing in DCM On Output Voltage of DC-DC Buck Power ConvertersMel Vin PinNo ratings yet
- EE3706 - Chapter 6 - Capacitors and InductorsDocument27 pagesEE3706 - Chapter 6 - Capacitors and InductorsLong QuangNo ratings yet
- Module 1 (Mathematics, Science, and Technology) Bsba 2 (Final Copy)Document7 pagesModule 1 (Mathematics, Science, and Technology) Bsba 2 (Final Copy)frederick liponNo ratings yet
- Magnetically Coupled Circuits: Sjtu 1Document30 pagesMagnetically Coupled Circuits: Sjtu 1Sahil JainNo ratings yet
- Ponova CT VT AnalyzerDocument71 pagesPonova CT VT AnalyzerYan Lin AungNo ratings yet
- Ziet Bhubaneshwar: - 1: Electric Charges and FieldsDocument16 pagesZiet Bhubaneshwar: - 1: Electric Charges and FieldsI dont have a NameNo ratings yet
- Lecture 7 Tacheometry NotesDocument4 pagesLecture 7 Tacheometry Notesjohn kaibiruNo ratings yet
- Department of Geomatics Engineering: AssignmentDocument4 pagesDepartment of Geomatics Engineering: AssignmentCecil GhimireNo ratings yet