You might also like
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- L - 14experence Connected Components WorkbenchDocument90 pagesL - 14experence Connected Components WorkbenchRosy CruzNo ratings yet
- XRIO Converter Manual Schweitzer SEL 311C R112 ENU TU2.30 V1.000Document8 pagesXRIO Converter Manual Schweitzer SEL 311C R112 ENU TU2.30 V1.000veeraboss100% (2)
- Areva p642 Xrio Converter Manual Enu Tu2.30 v1.000Document7 pagesAreva p642 Xrio Converter Manual Enu Tu2.30 v1.000Mohd AlghunimatNo ratings yet
- Micro800 Controller Programming Basics Lab ManualDocument40 pagesMicro800 Controller Programming Basics Lab ManualLuis Uribe AlbitesNo ratings yet
- PAC8000 Release Notes 8.4.0Document7 pagesPAC8000 Release Notes 8.4.0Rekik MHNo ratings yet
- RCU II Users Guide FV 9 10 31 08 PDFDocument51 pagesRCU II Users Guide FV 9 10 31 08 PDFNguyễn TrươngNo ratings yet
- Abt-N300-Tsj50 2005-04Document182 pagesAbt-N300-Tsj50 2005-04Luis Godoy Rojas100% (2)
- Micro800 Programming Basics Tutorial 2: Variables, Instruction BlocksDocument23 pagesMicro800 Programming Basics Tutorial 2: Variables, Instruction BlocksTete GoriNo ratings yet
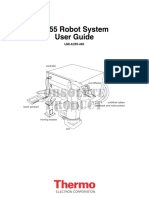
- A255 Robot System User GuideDocument124 pagesA255 Robot System User GuideGustavo CahuanaNo ratings yet
- 03 6866600D91 ServiceManual DimetraMic10RevDaDocument334 pages03 6866600D91 ServiceManual DimetraMic10RevDaZoheir Redouane Zahzah67% (3)
- IRC5-Getting Started 3HAC021564-001, Rev D, enDocument47 pagesIRC5-Getting Started 3HAC021564-001, Rev D, enadriano_falavinha9186No ratings yet
- Automation Fair 2018 - L03 - Connected Components Workbench Software Lab - Lab Manual PDFDocument110 pagesAutomation Fair 2018 - L03 - Connected Components Workbench Software Lab - Lab Manual PDFkisame50% (2)
- Stratix+8000+Faceplate+Quickstart+Guide+v1 0 2Document42 pagesStratix+8000+Faceplate+Quickstart+Guide+v1 0 2Felipe Osorio0% (1)
- FPGA Lab TutorialDocument53 pagesFPGA Lab TutorialSyed Ali HaiderNo ratings yet
- 750-353 EMS Elite Monitoring SystemDocument36 pages750-353 EMS Elite Monitoring SystemOsama AlgueferNo ratings yet
- Siemense SM 06 04 23 76Document17 pagesSiemense SM 06 04 23 76skidamdnevnoNo ratings yet
- CoTMS-59 FactoryTalk Historian Site Edition Advanced LabDocument90 pagesCoTMS-59 FactoryTalk Historian Site Edition Advanced LabJose SierraNo ratings yet
- ABB Substation GOOSE ConfigurationDocument24 pagesABB Substation GOOSE Configurationosmpot100% (1)
- ToolsNet 4000 Installation Guide (9836418101)Document72 pagesToolsNet 4000 Installation Guide (9836418101)Anton KazakovNo ratings yet
- IOTService User Manual 20181211Document62 pagesIOTService User Manual 20181211Anonymous yugocxnNo ratings yet
- Ultima Mentor Required Data Inputs For Huawei PDFDocument22 pagesUltima Mentor Required Data Inputs For Huawei PDFkhanhnam0509100% (1)
- L07 - Integrated Motion On Ethernet/IP - Basic Lab: For Classroom Use Only!Document58 pagesL07 - Integrated Motion On Ethernet/IP - Basic Lab: For Classroom Use Only!cuongvcs100% (1)
- Em MCD 03 514Document34 pagesEm MCD 03 514Thanhtung DangNo ratings yet
- ETAP User GuideDocument4,583 pagesETAP User Guidemario881027100% (1)
- PLC5 - ControlNet PDFDocument34 pagesPLC5 - ControlNet PDFKhalil AhmadNo ratings yet
- Exercise 8.1 - Hardware Configuration V2-1 PDFDocument4 pagesExercise 8.1 - Hardware Configuration V2-1 PDFRodrigoBurgosNo ratings yet
- PowerConnect - 2800 - Release Notes 10045Document6 pagesPowerConnect - 2800 - Release Notes 10045CAANo ratings yet
- Payment Interface - Technical DescriptionDocument105 pagesPayment Interface - Technical Descriptionjorge_vacaNo ratings yet
- PLC Programming Guide For Dse ControllersDocument30 pagesPLC Programming Guide For Dse ControllersAimi Mizuki Murtic100% (4)
- FAQ Using Add On InstructionsDocument4 pagesFAQ Using Add On InstructionstheaarelyifyNo ratings yet
- Olt Commissioning WizardsDocument21 pagesOlt Commissioning WizardsNaveed HarshaNo ratings yet
- Operetor Control PanelDocument68 pagesOperetor Control PanelMormor Omerta100% (2)
- CRSDocument140 pagesCRSJuan Diego RoaNo ratings yet
- Renr8091 04Document100 pagesRenr8091 04zekaNo ratings yet
- Instruction Manual LMCDocument22 pagesInstruction Manual LMCherpadianaNo ratings yet
- Tech-Tool_Release_News_2.8.230Document10 pagesTech-Tool_Release_News_2.8.230Reza AminiNo ratings yet
- Agilent 5530 Dynamic Calibrator - Update InformationDocument11 pagesAgilent 5530 Dynamic Calibrator - Update Informationcmm5477No ratings yet
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusFrom EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNo ratings yet
- 3HAC027097-001 Rev - enDocument32 pages3HAC027097-001 Rev - enmanehrkornNo ratings yet
- BAD804Q007Document37 pagesBAD804Q007albeertoNo ratings yet
- TAS71-R001E Ver4 DIASYS-IDOL++ Function Block Reference GuideDocument360 pagesTAS71-R001E Ver4 DIASYS-IDOL++ Function Block Reference GuideGeorge Asuncion100% (6)
- 2PAA109494-200 en 800xa History Release NotesDocument22 pages2PAA109494-200 en 800xa History Release NotesAkoKhalediNo ratings yet
- As 6.3 Condensed Training Manual March 2018 - ControlsDocument30 pagesAs 6.3 Condensed Training Manual March 2018 - ControlsSamir NandardhaneNo ratings yet
- TK 61755-2-OD-EN A-Series Control System Single Temperature Units RevE 11-2022 LRDocument256 pagesTK 61755-2-OD-EN A-Series Control System Single Temperature Units RevE 11-2022 LRTecnico Anzizar100% (1)
- 03 PlantPAx 5.0 Early Adopter Labs - PlantPAx 5.0Document134 pages03 PlantPAx 5.0 Early Adopter Labs - PlantPAx 5.0pisoy30392No ratings yet
- 3600-4171 01 TN EiprslogixDocument16 pages3600-4171 01 TN EiprslogixElias VelezNo ratings yet
- ETAP User GuideDocument4,762 pagesETAP User Guidebaskaranjay5502100% (11)
- CTI 2572-A Ethernet Tcp/Ip Module Installation and Operation GuideDocument132 pagesCTI 2572-A Ethernet Tcp/Ip Module Installation and Operation GuideRay JohnsonNo ratings yet
- Altair License Management System 11 0 1Document62 pagesAltair License Management System 11 0 1juanfdominguezNo ratings yet
- T00062 Data Acquisition DDE Server WorkshopDocument4 pagesT00062 Data Acquisition DDE Server WorkshopHAMZA BENNo ratings yet
- Extrahop and Appdynamics Deployment Guide: © 2015 Extrahop Networks, Inc. All Rights ReservedDocument11 pagesExtrahop and Appdynamics Deployment Guide: © 2015 Extrahop Networks, Inc. All Rights ReservedGame GMNo ratings yet
- G2070-91009 (Installing Chem Station For GC Systems)Document114 pagesG2070-91009 (Installing Chem Station For GC Systems)Vero MasspecNo ratings yet
- Controllogix Ethernet Bridge: 1756-EnbtDocument144 pagesControllogix Ethernet Bridge: 1756-EnbtneoflashNo ratings yet
- KPI OEE Downtime AnalyticsDocument16 pagesKPI OEE Downtime Analyticsrasa55555No ratings yet
- MVI56 (E) - MNET Add-On InstructionDocument10 pagesMVI56 (E) - MNET Add-On Instructiondiegos109No ratings yet
- LAB 3: PWM and Timer: 2.1 Tool RequirementsDocument4 pagesLAB 3: PWM and Timer: 2.1 Tool Requirementsprakash_shrNo ratings yet
- ABB Totalflow Getting StartedDocument53 pagesABB Totalflow Getting Starteddaleramlakhan5714No ratings yet
- Service Bulletin: Prevent Fuser Thermistor Detection Error (Prevent Call C-6020)Document2 pagesService Bulletin: Prevent Fuser Thermistor Detection Error (Prevent Call C-6020)ondemandprintNo ratings yet
- 7 main statistical analysis types summarizedDocument1 page7 main statistical analysis types summarizedjoaonitNo ratings yet
- Wisec2023 TuanDocument6 pagesWisec2023 TuanFrancisco J LopezNo ratings yet
- Mil Module 4Document6 pagesMil Module 4Joel Cabusao LacayNo ratings yet
- Dr. B.R. Ambedkar National Institute of Technology, JalandharDocument7 pagesDr. B.R. Ambedkar National Institute of Technology, JalandharPranav ShuklaNo ratings yet
- MobileDart Evolution MX8cDocument75 pagesMobileDart Evolution MX8cAbel Chaiña Gonzales100% (2)
- Medion 20017670Document9 pagesMedion 20017670BakiNo ratings yet
- Variational Autoencoders - Pre Quiz - Attempt ReviewDocument4 pagesVariational Autoencoders - Pre Quiz - Attempt Reviewvinay MurakambattuNo ratings yet
- Peningkatan Kualitas Pengelolaan Jurnal Ilmiah: Model Dashboard Information System UntukDocument8 pagesPeningkatan Kualitas Pengelolaan Jurnal Ilmiah: Model Dashboard Information System UntukKarunia Suci LestariNo ratings yet
- Sap Learning Hub - Course List: G-Tec EducationDocument50 pagesSap Learning Hub - Course List: G-Tec EducationCiril100% (1)
- Guideline Standard Installation ATN 910Document16 pagesGuideline Standard Installation ATN 910Novita WinarniNo ratings yet
- SSRN Id3847120Document5 pagesSSRN Id3847120bhaviyatalwar18No ratings yet
- Manual Compl Parte1de5 U5n404 Osn9800Document27 pagesManual Compl Parte1de5 U5n404 Osn9800Liu BruceNo ratings yet
- Seeking Assignments, in Which I Can Get More Exposure To New Dimensions of SAP in A Company of ReputeDocument4 pagesSeeking Assignments, in Which I Can Get More Exposure To New Dimensions of SAP in A Company of ReputeRam MohanNo ratings yet
- Revised Syllabus For Research MethodologyDocument25 pagesRevised Syllabus For Research MethodologyJawahar ANo ratings yet
- Recall U61Document8 pagesRecall U61Franco PovisNo ratings yet
- Guide For Keyword SearchDocument3 pagesGuide For Keyword SearchEstefanía Giraldo OsorioNo ratings yet
- KPrime BIOCHROMATOGRAPHY SYSTEMDocument8 pagesKPrime BIOCHROMATOGRAPHY SYSTEMTuyền KimNo ratings yet
- Database File System (DBFS) Best PracticesDocument3 pagesDatabase File System (DBFS) Best PracticessergNo ratings yet
- Operation Manual: Line Differential Protection and Control RED615Document116 pagesOperation Manual: Line Differential Protection and Control RED615Mirza AtayevNo ratings yet
- NC Program Editor Settings for CNC MachineDocument55 pagesNC Program Editor Settings for CNC MachineJuan MoraNo ratings yet
- Practical Lecture 1: - To Validate Climatic Data of Interpolated Vs Non-InterpolatedDocument42 pagesPractical Lecture 1: - To Validate Climatic Data of Interpolated Vs Non-Interpolatedadnan salikNo ratings yet
- White PaperDocument19 pagesWhite Paperanna5jordanovaNo ratings yet
- ALINCO DR-638 English ManualDocument43 pagesALINCO DR-638 English ManualChris GuarinNo ratings yet
- Excel VBA InStr Functio1Document7 pagesExcel VBA InStr Functio1Yamini ShindeNo ratings yet
- Statgraphics19 - User ManualDocument324 pagesStatgraphics19 - User ManualМилен МилтановNo ratings yet
- Corrective and Preventative Action Capa ProcedureDocument4 pagesCorrective and Preventative Action Capa Procedureshiv kumarNo ratings yet
- What Is LinuxDocument7 pagesWhat Is LinuxALANNo ratings yet
- DEMODocument11 pagesDEMOMarc GeraldNo ratings yet
- Line of BalanceDocument20 pagesLine of BalanceAyah100% (16)