You might also like
- Tutorial 1Document16 pagesTutorial 1Sai AnoopNo ratings yet
- Ee602 LaplaceDocument76 pagesEe602 LaplaceRadhi MusaNo ratings yet
- Module 2 Laplace TransformDocument13 pagesModule 2 Laplace TransformJohnnette AggabaoNo ratings yet
- Lec - 3-4 - Transfer Function and Laplace TransformDocument54 pagesLec - 3-4 - Transfer Function and Laplace TransformMaryam BhattiNo ratings yet
- Laplace Transform Applications in Various FieldsDocument47 pagesLaplace Transform Applications in Various Fieldsjucar fernandezNo ratings yet
- Laplace Transform Tutorial for Control SystemsDocument32 pagesLaplace Transform Tutorial for Control SystemsSai AnoopNo ratings yet
- Mathematical Models of Control SystemsDocument37 pagesMathematical Models of Control SystemsmorilloatilioNo ratings yet
- Laplace Transform: Definitions, Transfer FunctionsDocument58 pagesLaplace Transform: Definitions, Transfer FunctionsheroNo ratings yet
- Control SystemDocument45 pagesControl SystemKelvin KongNo ratings yet
- Laplace Transform (Updated 2018)Document29 pagesLaplace Transform (Updated 2018)Mohamad DuhokiNo ratings yet
- Automatics and Automatic ControlDocument33 pagesAutomatics and Automatic ControlaliNo ratings yet
- LaplaceDocument22 pagesLaplaceKomal SinghNo ratings yet
- Laplace Transform Explained in 40 CharactersDocument75 pagesLaplace Transform Explained in 40 Charactersnarains81No ratings yet
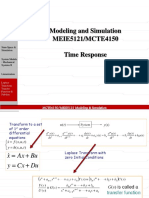
- Modeling and Simulation MEIE5121/MCTE4150 Time ResponseDocument31 pagesModeling and Simulation MEIE5121/MCTE4150 Time ResponsehazaaNo ratings yet
- Laplace Transform: BIOE 4200Document23 pagesLaplace Transform: BIOE 4200vasu_koneti5124No ratings yet
- Chapter56 Laplace&TFDocument106 pagesChapter56 Laplace&TFfebri setyawanNo ratings yet
- Ch15_Laplace Transforms IDocument45 pagesCh15_Laplace Transforms IdadsdNo ratings yet
- Unit-I 23 - 12 - 14Document157 pagesUnit-I 23 - 12 - 14Anonymous JDXbBDBNo ratings yet
- 2 Unit 1-Laplace TransformDocument35 pages2 Unit 1-Laplace TransformRahul KumarNo ratings yet
- Laplace Transform Circuit AnalysisDocument42 pagesLaplace Transform Circuit AnalysisAnonymous pS4LT2GJUSNo ratings yet
- School of Engineering Engineering Mathematics 4 (MTH60403/ENG2123)Document53 pagesSchool of Engineering Engineering Mathematics 4 (MTH60403/ENG2123)Porkkodi SugumaranNo ratings yet
- Laplace Transform: Solving Differential Equations with AlgebraDocument8 pagesLaplace Transform: Solving Differential Equations with AlgebraStephen Dela CruzNo ratings yet
- TheLaplaceTransform PDFDocument46 pagesTheLaplaceTransform PDFFábio ArrudaNo ratings yet
- 02 Chapter 02Document60 pages02 Chapter 02Get CubeloNo ratings yet
- Laplace Transforms: Spsu Mathematics DepartmentDocument37 pagesLaplace Transforms: Spsu Mathematics DepartmentVinith GandhiNo ratings yet
- Midterm Study ProblemDocument4 pagesMidterm Study ProblemTehe SaglamNo ratings yet
- Laplace Transforms1Document81 pagesLaplace Transforms1MoslemaWaftakherNo ratings yet
- T T T T T F: 4.0 Laplace TransformationDocument4 pagesT T T T T F: 4.0 Laplace TransformationSiti Munirah Binti ZainudinNo ratings yet
- Laplace TransformsDocument81 pagesLaplace TransformsChristopher OrtegaNo ratings yet
- Formulas LaplaceDocument1 pageFormulas LaplaceIvo GeceleNo ratings yet
- Attachment Laplace TransformDocument2 pagesAttachment Laplace Transformahmad hazimNo ratings yet
- Laplace Transforms1Document81 pagesLaplace Transforms1arunkumar SNo ratings yet
- Introduction to Laplace Transforms for Solving Differential EquationsDocument47 pagesIntroduction to Laplace Transforms for Solving Differential EquationsTalha MazharNo ratings yet
- Chapter 3: Dynamic ResponseDocument78 pagesChapter 3: Dynamic ResponseAhmedSalahNo ratings yet
- Laplace Transform and Time-Domain AnalysisDocument26 pagesLaplace Transform and Time-Domain Analysisppcool1No ratings yet
- Unit-Vi: Mathematics-II (7HC16)Document32 pagesUnit-Vi: Mathematics-II (7HC16)Kola KeerthanaNo ratings yet
- LT-1 (Laplace Transform)Document18 pagesLT-1 (Laplace Transform)Kola KeerthanaNo ratings yet
- Laplace Transform Chapter 1 IntroductionDocument28 pagesLaplace Transform Chapter 1 IntroductionMohammed NabilNo ratings yet
- Laplace HadyDocument52 pagesLaplace HadyT ANo ratings yet
- Lesson #2 Lecture #1 Review of Laplace TransformDocument16 pagesLesson #2 Lecture #1 Review of Laplace TransformShazidNo ratings yet
- Continuous-Time Analysis Using Laplace TransformDocument69 pagesContinuous-Time Analysis Using Laplace TransformPhạm Thành Luân100% (1)
- LaplaceDocument173 pagesLaplaceOscar Brian OscarONo ratings yet
- Laplace TransformDocument37 pagesLaplace TransformAMIE Study Circle, RoorkeeNo ratings yet
- Laplace TransformationDocument48 pagesLaplace TransformationGail Nathalie LiraNo ratings yet
- Ee202laplacetransform PDFDocument85 pagesEe202laplacetransform PDFFairusabdrNo ratings yet
- Presentation On Laplace TransformsDocument36 pagesPresentation On Laplace TransformsRahul SinghNo ratings yet
- Laplace Transform: Presentation: He YangDocument14 pagesLaplace Transform: Presentation: He YangsaadkhalisNo ratings yet
- Laplace-Stieltjes Transforms PDFDocument29 pagesLaplace-Stieltjes Transforms PDFsam256256No ratings yet
- Sheet 1 Laplace Transform 20190914Document3 pagesSheet 1 Laplace Transform 20190914midotaher765No ratings yet
- Lecture1-2 - 14704 - Lecture1-2 - 17822 - Laplace TransformDocument30 pagesLecture1-2 - 14704 - Lecture1-2 - 17822 - Laplace Transformanuj jainNo ratings yet
- IE474 Summer2022 Nise Ch2 PartA PDFDocument33 pagesIE474 Summer2022 Nise Ch2 PartA PDFAmon SimatwoNo ratings yet
- Lec 1Document23 pagesLec 1Abdulrahman AtefNo ratings yet
- Chapter 6 PPT Slides vs3Document22 pagesChapter 6 PPT Slides vs3Sherif Aly100% (1)
- Page 1Document1 pagePage 1Yamith BarrancoNo ratings yet
- CommunicationsDocument44 pagesCommunicationsSaikrishnaNo ratings yet
- Laplace TransformDocument17 pagesLaplace TransformMr AliNo ratings yet
- Laplace Transforms and Its Applications: Unit-IiiDocument68 pagesLaplace Transforms and Its Applications: Unit-IiiDiwakar ChauhanNo ratings yet
- TablaDocument2 pagesTablanestorGNo ratings yet
- Introduction To Laplace TransformsDocument32 pagesIntroduction To Laplace TransformsAd Man GeTigNo ratings yet
- Email Address For RationalDocument25 pagesEmail Address For RationalpinoygplusNo ratings yet
- Be Healthy, Happy and Holy - Sleep by 10 PM (By Mahanidhi Swami) PDFDocument4 pagesBe Healthy, Happy and Holy - Sleep by 10 PM (By Mahanidhi Swami) PDFDay FriendsNo ratings yet
- Safety Budget PlannerDocument12 pagesSafety Budget Plannersidhant nayakNo ratings yet
- Smoothed Bootstrap Nelson-Siegel Revisited June 2010Document38 pagesSmoothed Bootstrap Nelson-Siegel Revisited June 2010Jaime MaihuireNo ratings yet
- Steel Cargoes GuidanceDocument64 pagesSteel Cargoes GuidanceAamir SirohiNo ratings yet
- Law On Other Business Transactions 20181Document365 pagesLaw On Other Business Transactions 20181Leonel King0% (1)
- DDCS Expert User's Manual V1-已压缩Document137 pagesDDCS Expert User's Manual V1-已压缩andréNo ratings yet
- UNDERSTANDING FOOD HYGIENEDocument22 pagesUNDERSTANDING FOOD HYGIENESahilDalalNo ratings yet
- PSC Marpol InspectionDocument1 pagePSC Marpol InspectionΑΝΝΑ ΒΛΑΣΣΟΠΟΥΛΟΥNo ratings yet
- Garmin Etrex 30Document2 pagesGarmin Etrex 30Desli MunarsaNo ratings yet
- Antioxidant Activity by DPPH Radical Scavenging Method of Ageratum Conyzoides Linn. LeavesDocument7 pagesAntioxidant Activity by DPPH Radical Scavenging Method of Ageratum Conyzoides Linn. Leavespasid harlisaNo ratings yet
- NCLEX Cram Sheet: Essential Nursing Exam Facts in <40 CharactersDocument12 pagesNCLEX Cram Sheet: Essential Nursing Exam Facts in <40 CharactersSibel ErtuğrulNo ratings yet
- Insulation Coordination in Power System - Electrical4UDocument13 pagesInsulation Coordination in Power System - Electrical4UR.SivachandranNo ratings yet
- NTSE MAT Maharashtra 2011Document38 pagesNTSE MAT Maharashtra 2011Edward FieldNo ratings yet
- PTET 2022 Admit Card for Baljinder KaurDocument2 pagesPTET 2022 Admit Card for Baljinder KaurSimranpreet SudanNo ratings yet
- Student ProfileDocument2 pagesStudent Profileapi-571568290No ratings yet
- Mitigating Contractor's Claim On Loss and Expense Due To The Extension of Time in Public Projects: An Exploratory SurveyDocument12 pagesMitigating Contractor's Claim On Loss and Expense Due To The Extension of Time in Public Projects: An Exploratory SurveyWeei Zhee70No ratings yet
- Manually Installing IBM Spectrum Scale For Object StorageDocument2 pagesManually Installing IBM Spectrum Scale For Object StoragesohaileoNo ratings yet
- 1 s2.0 S136403211930423X MainDocument13 pages1 s2.0 S136403211930423X MainWei WangNo ratings yet
- Unusual Crowd Activity Detection Using Opencv and Motion Influence MapDocument6 pagesUnusual Crowd Activity Detection Using Opencv and Motion Influence MapAkshat GuptaNo ratings yet
- Analysis of NOx in Ambient AirDocument12 pagesAnalysis of NOx in Ambient AirECRDNo ratings yet
- Code: Final Exam in English: Grade 8Document7 pagesCode: Final Exam in English: Grade 8Luka EradzeNo ratings yet
- Isoefficiency Function A Scalability Metric For PaDocument20 pagesIsoefficiency Function A Scalability Metric For PaDasha PoluninaNo ratings yet
- Registered Unregistered Land EssayDocument3 pagesRegistered Unregistered Land Essayzamrank91No ratings yet
- Airworthiness StandardsDocument15 pagesAirworthiness StandardsJason RossNo ratings yet
- Calculus (Solution To Assignment Iv) : February 12, 2012Document4 pagesCalculus (Solution To Assignment Iv) : February 12, 2012Mawuena MelomeyNo ratings yet
- Egyptian Town PlanningDocument43 pagesEgyptian Town PlanningAbhishek Venkitaraman Iyer96% (23)
- sr20 Switchingsystems080222Document20 pagessr20 Switchingsystems080222Daniel BholahNo ratings yet
- UEM Sol To Exerc Chap 097Document11 pagesUEM Sol To Exerc Chap 097sibieNo ratings yet
- Vitamin D For MS PatientsDocument1 pageVitamin D For MS PatientsDimitrios PapadimitriouNo ratings yet