You might also like
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Math4 170513085146Document47 pagesMath4 170513085146jucar fernandezNo ratings yet
- Tutorial 2 SolutionsDocument32 pagesTutorial 2 SolutionsSai AnoopNo ratings yet
- Laplace Circuit AnalysisDocument41 pagesLaplace Circuit AnalysishibaNo ratings yet
- Ee602 LaplaceDocument76 pagesEe602 LaplaceRadhi MusaNo ratings yet
- Introduction To Laplace TransformsDocument47 pagesIntroduction To Laplace TransformsTalha MazharNo ratings yet
- Introduction To Laplace TransformsDocument32 pagesIntroduction To Laplace TransformsAd Man GeTigNo ratings yet
- Mathematical Models of Control SystemsDocument37 pagesMathematical Models of Control SystemsmorilloatilioNo ratings yet
- Ee202laplacetransform PDFDocument85 pagesEe202laplacetransform PDFFairusabdrNo ratings yet
- IE474 Summer2022 Nise Ch2 PartA PDFDocument33 pagesIE474 Summer2022 Nise Ch2 PartA PDFAmon SimatwoNo ratings yet
- Laplace FormulaDocument16 pagesLaplace Formulashubh.fincherNo ratings yet
- Laplace Transforms: Spsu Mathematics DepartmentDocument37 pagesLaplace Transforms: Spsu Mathematics DepartmentVinith GandhiNo ratings yet
- Chapter56 Laplace&TFDocument106 pagesChapter56 Laplace&TFfebri setyawanNo ratings yet
- Automatics and Automatic ControlDocument33 pagesAutomatics and Automatic ControlaliNo ratings yet
- Midterm Study ProblemDocument4 pagesMidterm Study ProblemTehe SaglamNo ratings yet
- Ch15 - Laplace Transforms IDocument45 pagesCh15 - Laplace Transforms IdadsdNo ratings yet
- Laplace Transform OdeDocument24 pagesLaplace Transform OdeUmer KhanNo ratings yet
- LaplaceDocument22 pagesLaplaceKomal SinghNo ratings yet
- ch08 - ModifiedDocument30 pagesch08 - ModifiedYato SenkaiNo ratings yet
- Lecture 2 - Mathematical Model - Transfer Function and Block DiagramDocument20 pagesLecture 2 - Mathematical Model - Transfer Function and Block DiagramMouadh WahraniNo ratings yet
- Presentation On Laplace TransformsDocument36 pagesPresentation On Laplace TransformsRahul SinghNo ratings yet
- Tutorial 1Document16 pagesTutorial 1Sai AnoopNo ratings yet
- Automatic ControlDocument16 pagesAutomatic ControlSayed NagyNo ratings yet
- Module 2 Laplace TransformDocument13 pagesModule 2 Laplace TransformJohnnette AggabaoNo ratings yet
- Lesson #2 Lecture #1 Review of Laplace TransformDocument16 pagesLesson #2 Lecture #1 Review of Laplace TransformShazidNo ratings yet
- Laplace Transform Transfer Function: Prepared By: Engr. C. DullasDocument28 pagesLaplace Transform Transfer Function: Prepared By: Engr. C. DullasJesse Jon FerolinoNo ratings yet
- Matematika Teknik Kimia 1: Jurusan Teknik Kimia Fakultas Teknik Universitas Negeri SemarangDocument47 pagesMatematika Teknik Kimia 1: Jurusan Teknik Kimia Fakultas Teknik Universitas Negeri SemarangSyauqi IlmiNo ratings yet
- Blake Problem ComputationDocument42 pagesBlake Problem ComputationAnonymous pS4LT2GJUSNo ratings yet
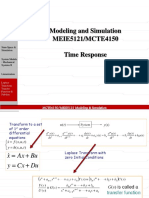
- Modeling and Simulation MEIE5121/MCTE4150 Time ResponseDocument31 pagesModeling and Simulation MEIE5121/MCTE4150 Time ResponsehazaaNo ratings yet
- Process Control 7Document45 pagesProcess Control 7ali AbbasNo ratings yet
- Chapter 3: Dynamic ResponseDocument78 pagesChapter 3: Dynamic ResponseAhmedSalahNo ratings yet
- Laplace Transforms1Document81 pagesLaplace Transforms1MoslemaWaftakherNo ratings yet
- Unit-I 23 - 12 - 14Document157 pagesUnit-I 23 - 12 - 14Anonymous JDXbBDBNo ratings yet
- Laplace TransformsDocument81 pagesLaplace TransformsChristopher OrtegaNo ratings yet
- 02 Chapter 02Document60 pages02 Chapter 02Get CubeloNo ratings yet
- Unit-Vi: Mathematics-II (7HC16)Document32 pagesUnit-Vi: Mathematics-II (7HC16)Kola KeerthanaNo ratings yet
- Laplace Transforms1Document81 pagesLaplace Transforms1arunkumar SNo ratings yet
- Chapter 2 - v1sDocument97 pagesChapter 2 - v1sKiet Kuat KongNo ratings yet
- Laplace HadyDocument52 pagesLaplace HadyT ANo ratings yet
- Lecture 2: Laplace TransformDocument58 pagesLecture 2: Laplace TransformheroNo ratings yet
- Laplace Tables and PropertiesDocument2 pagesLaplace Tables and Propertiesahmed belalNo ratings yet
- MECH 370 - Modeling, Simulation and Control Systems, Final Examination, 09:00 - 12:00, April 15, 2010 - 1/4Document4 pagesMECH 370 - Modeling, Simulation and Control Systems, Final Examination, 09:00 - 12:00, April 15, 2010 - 1/4Camila MayorgaNo ratings yet
- Circuit Analysis Using Laplace TransformDocument94 pagesCircuit Analysis Using Laplace TransformSilvers RayleighNo ratings yet
- Chapter (1) Laplace TransformDocument28 pagesChapter (1) Laplace TransformMohammed NabilNo ratings yet
- Control SystemDocument45 pagesControl SystemKelvin KongNo ratings yet
- 33laplace Transforms and Non Standard Functions PDFDocument4 pages33laplace Transforms and Non Standard Functions PDFkinfeNo ratings yet
- w2 3 Laplace TransformationsDocument24 pagesw2 3 Laplace Transformationsnepharius4No ratings yet
- Chapter 6 PPT Slides vs3Document22 pagesChapter 6 PPT Slides vs3Sherif Aly100% (1)
- Laplace1a PDFDocument74 pagesLaplace1a PDFRenaltha Puja BagaskaraNo ratings yet
- Online Control Lecture #2Document33 pagesOnline Control Lecture #2Noor GamingNo ratings yet
- Laplace Transform Properties: EE3511: Automatic Control SystemsDocument47 pagesLaplace Transform Properties: EE3511: Automatic Control SystemsAIVaibhav GhubadeNo ratings yet
- Laplace Transform Analysis: Circuit Applications ApplicationsDocument26 pagesLaplace Transform Analysis: Circuit Applications ApplicationsDharamNo ratings yet
- Chapter 7Document75 pagesChapter 7narains81No ratings yet
- Laplace Transform: Presentation: He YangDocument14 pagesLaplace Transform: Presentation: He YangsaadkhalisNo ratings yet
- 2-Mathematical Models of SystemsDocument42 pages2-Mathematical Models of SystemsKeiko AzizahNo ratings yet
- Laplace TransformDocument14 pagesLaplace TransformDeri RamadhanNo ratings yet
- Lecture1-2 - 14704 - Lecture1-2 - 17822 - Laplace TransformDocument30 pagesLecture1-2 - 14704 - Lecture1-2 - 17822 - Laplace Transformanuj jainNo ratings yet
- Laplace TransformDocument37 pagesLaplace TransformAMIE Study Circle, RoorkeeNo ratings yet
- Module3-Circuit Analysis in The S DomainDocument30 pagesModule3-Circuit Analysis in The S DomainWINORLOSENo ratings yet
- Bab 2 Transformasi Laplace: Mathematician and Astronomer Pierre-Simon LaplaceDocument31 pagesBab 2 Transformasi Laplace: Mathematician and Astronomer Pierre-Simon LaplaceRizqi Cahyo M PutraNo ratings yet
- Lec - 7 - Modeling of Mechanical SystemsDocument14 pagesLec - 7 - Modeling of Mechanical SystemsMaryam BhattiNo ratings yet
- Lec - 6 - Modeling of Electrical SystemsDocument18 pagesLec - 6 - Modeling of Electrical SystemsMaryam BhattiNo ratings yet
- Lec - 5 - Modeling of Electrical SystemsDocument33 pagesLec - 5 - Modeling of Electrical SystemsMaryam BhattiNo ratings yet
- Lec - 1-2 Introduction To Control SystemsDocument25 pagesLec - 1-2 Introduction To Control SystemsMaryam BhattiNo ratings yet
- 1.6 Determine A Quadratic Equation Given Its Roots - WorksheetDocument3 pages1.6 Determine A Quadratic Equation Given Its Roots - WorksheetWilly ClementeNo ratings yet
- Solution CH 02 Part 3Document7 pagesSolution CH 02 Part 3Srinivas CherukuNo ratings yet
- Maths PPT 1-1Document24 pagesMaths PPT 1-1RoshanNo ratings yet
- WS7 IntegerDocument6 pagesWS7 Integerpriyanshu rawatNo ratings yet
- UEM Sol To Exerc Chap 049 PDFDocument16 pagesUEM Sol To Exerc Chap 049 PDFJianee WanNo ratings yet
- CAT Syllabus For Quantitative AptitudeDocument9 pagesCAT Syllabus For Quantitative AptitudePriyanshu JhaNo ratings yet
- 1-1 Numerical Methods InttroductionDocument20 pages1-1 Numerical Methods InttroductionwasifNo ratings yet
- Bookss16 Whole Book v2Document310 pagesBookss16 Whole Book v2fpttmmNo ratings yet
- Complex Numbers IIT-JEEDocument3 pagesComplex Numbers IIT-JEEnasirdiariesNo ratings yet
- Mock Math Counts School Sprint 2015Document9 pagesMock Math Counts School Sprint 2015Andrew CourtneyNo ratings yet
- Erdős A. Renyi - Some Further Statistical Properties of The Digits in Cantor's SeriesDocument9 pagesErdős A. Renyi - Some Further Statistical Properties of The Digits in Cantor's Seriesepidendrum2No ratings yet
- Shanghai American School: Mathematics DepartmentDocument5 pagesShanghai American School: Mathematics DepartmentsubcribedNo ratings yet
- Controllability and Observability of Nonlinear Systems: Key PointsDocument22 pagesControllability and Observability of Nonlinear Systems: Key PointsHelios5993No ratings yet
- IDMCDocument611 pagesIDMCMarianaCottoNo ratings yet
- (Algebra) PLE, AP, QE - MCQ 2021Document4 pages(Algebra) PLE, AP, QE - MCQ 2021basavarajNo ratings yet
- General Mathematics First QTR Exam 2022 2023Document3 pagesGeneral Mathematics First QTR Exam 2022 2023Allan Membrillos TorreonNo ratings yet
- Tensor Analysis-Chapter 1Document81 pagesTensor Analysis-Chapter 1qftgaugeNo ratings yet
- SchedulesDocument43 pagesScheduleslalomg_straussNo ratings yet
- 2D 3D TransformationsDocument24 pages2D 3D TransformationsEman KarisNo ratings yet
- Matlab IntroDocument15 pagesMatlab Introklesta haxhiuNo ratings yet
- The Steps of The Simplex AlgorithmDocument8 pagesThe Steps of The Simplex AlgorithmtbmariNo ratings yet
- Finite Element Method (ME G512) Comprehensive Exam: Birla Institute of Technology & Science, Pilani - Hyderabad CampusDocument4 pagesFinite Element Method (ME G512) Comprehensive Exam: Birla Institute of Technology & Science, Pilani - Hyderabad Campustarun saddhahaqNo ratings yet
- Mehdi Rahmani-Andebili - Precalculus - Practice Problems, Methods, and Solutions (2021)Document119 pagesMehdi Rahmani-Andebili - Precalculus - Practice Problems, Methods, and Solutions (2021)Rodrigo Osorio Guerra100% (1)
- 13A05302 Discrete Mathematics PDFDocument1 page13A05302 Discrete Mathematics PDFManojKarthikNo ratings yet
- Gaussian Quadrature: Gauss 2Document7 pagesGaussian Quadrature: Gauss 2Michael Ayobami AdelekeNo ratings yet
- Basic Calculus Lesson 7 Integral Calculus Activity 7: Apply LinearityDocument27 pagesBasic Calculus Lesson 7 Integral Calculus Activity 7: Apply LinearityandreagassiNo ratings yet
- Module 2 MMWDocument28 pagesModule 2 MMWJAN HENRYCK RODRIGUEZNo ratings yet
- (Chris A.M. Peters, Joseph H. M. Steenbrink) Mixed Hodge StructuresDocument467 pages(Chris A.M. Peters, Joseph H. M. Steenbrink) Mixed Hodge StructuresShaulB7100% (1)
- Scattering Matrix Characterization of Microwave ComponentsDocument24 pagesScattering Matrix Characterization of Microwave ComponentsClique for Applied Research in Electronic Technology100% (1)
- Angular MomentumDocument10 pagesAngular MomentumYohana SaraswatiNo ratings yet