You might also like
- ACI 350 3 06 Appendix B Seismic Loads For Liquid Containing Rectangular RC Tank Rev01 04 Nov 2014 PDFDocument13 pagesACI 350 3 06 Appendix B Seismic Loads For Liquid Containing Rectangular RC Tank Rev01 04 Nov 2014 PDFLuis Gil MorenoNo ratings yet
- 2 Marks Question & AnswerDocument9 pages2 Marks Question & AnswerShanmuga PriyaNo ratings yet
- Design of BearingsDocument24 pagesDesign of BearingsFarrukh RizwanNo ratings yet
- Introduction To Kinematics and MechanismsDocument25 pagesIntroduction To Kinematics and MechanismsAli Khan Niazi100% (1)
- Design of Water Tanks-CE 05014 p3 6Document65 pagesDesign of Water Tanks-CE 05014 p3 6engineerkranthi4055100% (1)
- Experiments Physics Form 4Document52 pagesExperiments Physics Form 4cikgusya67% (3)
- ECG553 - CHAP 3A - BC of Shallow FoundationDocument39 pagesECG553 - CHAP 3A - BC of Shallow FoundationAinur NasuhaNo ratings yet
- Chapter4 Forward Kinematics For PositionDocument23 pagesChapter4 Forward Kinematics For Positionأحمد دعبسNo ratings yet
- Industrial Robotics: Course OutcomesDocument74 pagesIndustrial Robotics: Course OutcomesMeenakshi PriyaNo ratings yet
- ADVANCED Cargo Securing Calculation, Data Input Sheet: W (X, Y) W (X) W (Y)Document8 pagesADVANCED Cargo Securing Calculation, Data Input Sheet: W (X, Y) W (X) W (Y)thugsdei100% (1)
- Chapter 4 Slope Stability PDFDocument40 pagesChapter 4 Slope Stability PDFp130324No ratings yet
- 25 IdeasDocument2 pages25 IdeasAnan BarghouthyNo ratings yet
- 3-2-1 Principle Used For Jig and Fixture Locating MethodDocument3 pages3-2-1 Principle Used For Jig and Fixture Locating MethodrlwersalNo ratings yet
- Cams SynthesisDocument36 pagesCams SynthesisShinchanus Monyetus GeblekusNo ratings yet
- Paulo Correa and Alexandra Correa - Introduction To Experimental Aetherometry - Volume IIB: New Energy Physics and The Discovery of Ambipolar EnergyDocument12 pagesPaulo Correa and Alexandra Correa - Introduction To Experimental Aetherometry - Volume IIB: New Energy Physics and The Discovery of Ambipolar EnergySonyRedNo ratings yet
- Fast RotationsDocument14 pagesFast RotationsshashankifNo ratings yet
- Degree of Freedom PDFDocument11 pagesDegree of Freedom PDFSatyajit SahuNo ratings yet
- F02Sample Test SolutionsDocument11 pagesF02Sample Test SolutionslakakakakakakakkakaNo ratings yet
- Definitions: - Mechanism: - Planar Mechanism: - Spatial MechanismDocument8 pagesDefinitions: - Mechanism: - Planar Mechanism: - Spatial Mechanismraijin4lifeNo ratings yet
- Gyroscope Lab MechIIDocument5 pagesGyroscope Lab MechIIrhusseinpos4765No ratings yet
- Tier 2 E&M Lab: Faraday's Law: ObjectiveDocument18 pagesTier 2 E&M Lab: Faraday's Law: ObjectiveChirag SharmaNo ratings yet
- Inverse Kinematics NotesDocument70 pagesInverse Kinematics Noteskomailhaiderz123No ratings yet
- Ch.1 Solucionario Mechanisms and Dynamics of MachineryDocument54 pagesCh.1 Solucionario Mechanisms and Dynamics of MachineryNico MingoNo ratings yet
- Graphical SynthesisDocument58 pagesGraphical SynthesisAnas Asif100% (2)
- UNIT-IVDocument5 pagesUNIT-IVtarasasankaNo ratings yet
- Synthesis and AnalysisDocument31 pagesSynthesis and Analysiskunal shegokarNo ratings yet
- PDF Document 3Document15 pagesPDF Document 3John SlyNo ratings yet
- Eas Unit IiDocument260 pagesEas Unit IiRekha ManideepNo ratings yet
- Tiny Quater Ni On Dynamics Library 006Document71 pagesTiny Quater Ni On Dynamics Library 006Brian BeckmanNo ratings yet
- Drive Train BasicsDocument10 pagesDrive Train BasicsbanksjnkmlNo ratings yet
- Project1 PulleySystemsDocument5 pagesProject1 PulleySystemsFinito TheEndNo ratings yet
- AB 07 Rafif Kinematic Analysis of The Hexapod RobotDocument24 pagesAB 07 Rafif Kinematic Analysis of The Hexapod RobotTindyo PrasetyoNo ratings yet
- Wk6L16 18Document21 pagesWk6L16 18lengs SimzNo ratings yet
- Introduction To Concepts in RoboticsDocument26 pagesIntroduction To Concepts in RoboticsزهديابوانسNo ratings yet
- Root Locus: - Review: Asymptotes - Locus and Root Locus - Rules For Sketching Root Locus - ExamplesDocument30 pagesRoot Locus: - Review: Asymptotes - Locus and Root Locus - Rules For Sketching Root Locus - ExamplesMeer KhanNo ratings yet
- FYP PresentationDocument81 pagesFYP PresentationTarek Bmr100% (1)
- ME 3670: Design and Analysis of Machine Elements 1: Part I: Kinematics and Mechanisms Lecture 16-19 Cam Motion Program and Profile Design Read 8.1-8.10, KinzelDocument34 pagesME 3670: Design and Analysis of Machine Elements 1: Part I: Kinematics and Mechanisms Lecture 16-19 Cam Motion Program and Profile Design Read 8.1-8.10, KinzelIndushekhar KumarNo ratings yet
- Analytical Inverse Kinematics Algorithm of 5 Dof Robot ArmDocument13 pagesAnalytical Inverse Kinematics Algorithm of 5 Dof Robot ArmsathyaNo ratings yet
- LAB1 Report FileDocument4 pagesLAB1 Report FiletawandaNo ratings yet
- Roller Hemming SimulationDocument12 pagesRoller Hemming SimulationAjay NegiNo ratings yet
- Chapter 4 Lecture Notes (Joints & End-Effector) - 02 JunDocument57 pagesChapter 4 Lecture Notes (Joints & End-Effector) - 02 Junakash kahsyapNo ratings yet
- KDM 1Document42 pagesKDM 1KarthikeyanRamanujamNo ratings yet
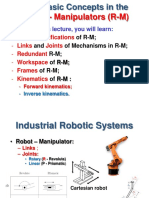
- Teme - 1 (Revision) Some Basic Concepts in Robots Manipulator-Ver 1. of Doz Ivan Avramov 28 Jan 2021Document28 pagesTeme - 1 (Revision) Some Basic Concepts in Robots Manipulator-Ver 1. of Doz Ivan Avramov 28 Jan 2021stanimirNo ratings yet
- Kinematcs DiagramDocument62 pagesKinematcs Diagrammmm100% (1)
- 2021 - ME4R3 - Midterm 3 SolutionsDocument4 pages2021 - ME4R3 - Midterm 3 SolutionsMr HussoNo ratings yet
- Final Exam: Introduction To Robotics 16-311 Fall 2010Document11 pagesFinal Exam: Introduction To Robotics 16-311 Fall 2010Karthi KeyanNo ratings yet
- Lecture 3Document31 pagesLecture 3Wolf DragonneNo ratings yet
- Part VI Printer - ImpDocument21 pagesPart VI Printer - ImpRahul Kumar KNo ratings yet
- ME303 Wk02 Kinematics Load Determination PDFDocument23 pagesME303 Wk02 Kinematics Load Determination PDF许戎汉No ratings yet
- Trajectory Generation: Dr.-Ing. John NassourDocument60 pagesTrajectory Generation: Dr.-Ing. John NassourRAKSHITNo ratings yet
- Robotics1 18.01.11 PDFDocument14 pagesRobotics1 18.01.11 PDFmezzi houssemNo ratings yet
- Root Locus Analysis in Z Plane: Dr. Sadeq Al-MajidiDocument10 pagesRoot Locus Analysis in Z Plane: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
- Chapter 5 (Trajectory Planning)Document24 pagesChapter 5 (Trajectory Planning)Saurabh ThakurNo ratings yet
- 2-Graphical Linkage SynthesisDocument52 pages2-Graphical Linkage SynthesisDanialNo ratings yet
- Lect Position AnalysisDocument66 pagesLect Position AnalysisRayan IsranNo ratings yet
- A Calibration Procedure For The Parallel Robot Delta 4: P. Maurine, E. DombreDocument6 pagesA Calibration Procedure For The Parallel Robot Delta 4: P. Maurine, E. DombreHoracio GeorgeNo ratings yet
- Lect Position AnalysisDocument158 pagesLect Position AnalysisHassam Balouch100% (1)
- Lecture 4Document34 pagesLecture 4Wolf DragonneNo ratings yet
- Do Now: Describe What Will Happen To The Following Graphs of F (X)Document20 pagesDo Now: Describe What Will Happen To The Following Graphs of F (X)wsiepielaNo ratings yet
- Lab 12 PDFDocument5 pagesLab 12 PDFsharonNo ratings yet
- Lab 12Document5 pagesLab 12sharonNo ratings yet
- Experiment 10Document4 pagesExperiment 10Rohan SharmaNo ratings yet
- Mechanical Systems: Serial ManipulatorDocument13 pagesMechanical Systems: Serial ManipulatorCristina González GarcíaNo ratings yet
- Mobile Robotics-Assignment1Document4 pagesMobile Robotics-Assignment1Lediana BrahimiNo ratings yet
- Chaos Exp 2 To Word PDF TYARDocument9 pagesChaos Exp 2 To Word PDF TYARnishrish sihagNo ratings yet
- An Analytical Solution For The Inverse Kinematics of A Redundant 7DoF Manipulator With Link Offsets-Claasens1 - 2010Document7 pagesAn Analytical Solution For The Inverse Kinematics of A Redundant 7DoF Manipulator With Link Offsets-Claasens1 - 2010Thao PhuongNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Fundamentals of Robotics 01Document63 pagesFundamentals of Robotics 01noorulain66.csNo ratings yet
- Final STS APP REPORTDocument48 pagesFinal STS APP REPORTnoorulain66.csNo ratings yet
- FYP Handbook-V1.0 - WPSDocument79 pagesFYP Handbook-V1.0 - WPSnoorulain66.csNo ratings yet
- FYP Final Report FormatDocument1 pageFYP Final Report Formatnoorulain66.csNo ratings yet
- Instrument NavigationDocument4 pagesInstrument Navigation9t42sn2pz5No ratings yet
- PIANC Seminar Henry WardDocument24 pagesPIANC Seminar Henry WardAl-Razzaq Al-WahhabNo ratings yet
- ManualDocument121 pagesManualSebastian AlvaradoNo ratings yet
- Tan 3/2 Tan 2/3 Sin 2/3 Cos 2/3: (CPMT 1993)Document3 pagesTan 3/2 Tan 2/3 Sin 2/3 Cos 2/3: (CPMT 1993)AshwinNo ratings yet
- Mechanical Behavior of Concrete PavementDocument13 pagesMechanical Behavior of Concrete Pavementanant11235No ratings yet
- APM2018Document26 pagesAPM2018Prashant GuptaNo ratings yet
- Chapter 6 Solutions Modern Physics 4th EditionDocument28 pagesChapter 6 Solutions Modern Physics 4th EditionhabanerochildNo ratings yet
- The Ether Crisis in PhysicsDocument12 pagesThe Ether Crisis in PhysicsGeorge Mpantes mathematics teacherNo ratings yet
- Answer All Questions in This SectionDocument13 pagesAnswer All Questions in This SectionbenNo ratings yet
- Heat Mass TransferDocument5 pagesHeat Mass Transferlampshade17No ratings yet
- Lateral LoadsDocument48 pagesLateral LoadsAlemayehu DargeNo ratings yet
- Lecture 3 Buoyancy and StabilityDocument21 pagesLecture 3 Buoyancy and StabilityKokoy Mae Straw100% (1)
- Storey Drift in A BuildingDocument23 pagesStorey Drift in A BuildingRajendra KambleNo ratings yet
- Effect of Roughness and Glass Cover On Solar Air Heater Performance-A ReviewDocument13 pagesEffect of Roughness and Glass Cover On Solar Air Heater Performance-A Reviewamitkumar mishraNo ratings yet
- X Viber Balancing MethodDocument8 pagesX Viber Balancing Methodajit_kelkar4421No ratings yet
- Digitized SLeM Q3 W4 Wave CVLGDocument58 pagesDigitized SLeM Q3 W4 Wave CVLGCarla RombanoNo ratings yet
- Conceps of RCC-PCCDocument63 pagesConceps of RCC-PCCurhenNo ratings yet
- Fde312 Part IDocument39 pagesFde312 Part ISrijan GuptaNo ratings yet
- Drag Coefficient of Sphere - FinalDocument9 pagesDrag Coefficient of Sphere - FinalPeter BournelisNo ratings yet
- Physics Bits For Fluid Dynamic PDFDocument40 pagesPhysics Bits For Fluid Dynamic PDFMALLA DOLANo ratings yet
- Grid CouplingsDocument4 pagesGrid Couplingsivan makandoNo ratings yet