You might also like
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- TorsionDocument19 pagesTorsionZewdieNo ratings yet
- The Torsion FormulaDocument12 pagesThe Torsion FormulaRonaldoNo ratings yet
- Chapter 3 - Torsion 3-A. Introduction: From The Axis of The Shaft. Since The Projection Upon ADocument2 pagesChapter 3 - Torsion 3-A. Introduction: From The Axis of The Shaft. Since The Projection Upon AAndre BocoNo ratings yet
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresFrom EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresRating: 4 out of 5 stars4/5 (1)
- Torsional Stresses in Shaft (Civil Engg. For AUST EEE 1/1)Document36 pagesTorsional Stresses in Shaft (Civil Engg. For AUST EEE 1/1)Fazlay ElahiNo ratings yet
- Linear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionFrom EverandLinear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionNo ratings yet
- TorsionDocument7 pagesTorsionSubrata MondalNo ratings yet
- Torsion of Circular ShaftsDocument11 pagesTorsion of Circular Shaftsmatteo_1234No ratings yet
- Design of Springs: Version 2 ME, IIT KharagpurDocument12 pagesDesign of Springs: Version 2 ME, IIT KharagpurDEEPJYOTI BASAKNo ratings yet
- 19 Introduction To Design of Helical SpringsDocument12 pages19 Introduction To Design of Helical SpringsPRASAD326100% (3)
- CSE 125 TorsionDocument10 pagesCSE 125 TorsionKent KimstoneNo ratings yet
- Torsion TestDocument7 pagesTorsion TestmohanadymtNo ratings yet
- Module 3 - TorsionDocument20 pagesModule 3 - TorsionArin ParkNo ratings yet
- Chap03 A PDFDocument36 pagesChap03 A PDFdyah ykNo ratings yet
- Chap03 A PDFDocument36 pagesChap03 A PDFdyah ykNo ratings yet
- Chapter12 PDFDocument17 pagesChapter12 PDFAlexandru PuiuNo ratings yet
- MoM - Ch3 (Wexercise)Document50 pagesMoM - Ch3 (Wexercise)Amna OmerNo ratings yet
- Module 7 ES7Document15 pagesModule 7 ES7Mel John ClementeNo ratings yet
- Chapter 4: TorsionDocument9 pagesChapter 4: TorsionAshish KumarNo ratings yet
- Chapter3 Torsion FinalDocument78 pagesChapter3 Torsion FinalNaveen KumarNo ratings yet
- The Torsion Pendulum (One or Two Weights)Document10 pagesThe Torsion Pendulum (One or Two Weights)DIPESHNo ratings yet
- To RsionDocument16 pagesTo Rsionpriodeep chowdhuryNo ratings yet
- CVE 202-Torsion of ShaftsDocument15 pagesCVE 202-Torsion of Shaftsodubade opeyemiNo ratings yet
- Notes TorsionDocument15 pagesNotes TorsionblehsadnjsNo ratings yet
- TorsionDocument14 pagesTorsionali wissamNo ratings yet
- AISC Engineering Journal - Torsional Analysis of Curved Box Girders by M/R MethodDocument10 pagesAISC Engineering Journal - Torsional Analysis of Curved Box Girders by M/R MethodLeviNo ratings yet
- Chapter 02 - Torsion and ExceriseDocument59 pagesChapter 02 - Torsion and ExcerisesengthaiNo ratings yet
- Strength of MTRL Chap4Document16 pagesStrength of MTRL Chap4Abraham DerejeNo ratings yet
- Dynamicstrifilar Suspension 2 JKCRECDocument16 pagesDynamicstrifilar Suspension 2 JKCRECtoecrusher0% (1)
- Note - Chapter 5 - TorsionDocument28 pagesNote - Chapter 5 - TorsionRobel seyoumNo ratings yet
- 01 Lecture Notes Torsion (1) AS 3600Document7 pages01 Lecture Notes Torsion (1) AS 3600April IngramNo ratings yet
- Filament Winding Shape OptimizationDocument14 pagesFilament Winding Shape OptimizationDanielNo ratings yet
- CIE 313 SpringsDocument11 pagesCIE 313 SpringsTobi OlaiyaNo ratings yet
- Strength of Materials CIE 302Document88 pagesStrength of Materials CIE 302kingNo ratings yet
- Torsion I: Prepared By: Nash BonaventuraDocument25 pagesTorsion I: Prepared By: Nash Bonaventuranashb96No ratings yet
- BFC 20903 (Mechanics of Materials) Chapter 6: TorsionDocument26 pagesBFC 20903 (Mechanics of Materials) Chapter 6: TorsionHamierul MohamadNo ratings yet
- 1706 07878Document19 pages1706 07878Ch ZainNo ratings yet
- Chapter 02 - TorsionDocument35 pagesChapter 02 - Torsionsengthai100% (1)
- TorsionDocument27 pagesTorsionsoulsellNo ratings yet
- Vibration of Cracked Shafts in BendingDocument11 pagesVibration of Cracked Shafts in BendingNirmal KushwahaNo ratings yet
- Practical Task 4 SomDocument3 pagesPractical Task 4 SomSyfull musicNo ratings yet
- TorsionDocument3 pagesTorsionfaizy216No ratings yet
- Chapter 6 ACKulkarniDocument43 pagesChapter 6 ACKulkarnipurijatinNo ratings yet
- Torsion ShaftDocument6 pagesTorsion ShaftmichaelNo ratings yet
- MOM Module 4Document51 pagesMOM Module 4Ramesh Reddy B TNo ratings yet
- Torsion: Module No. 4Document10 pagesTorsion: Module No. 4Ralph Bernard Dela RosaNo ratings yet
- Chap03 ADocument36 pagesChap03 ASaira TahirNo ratings yet
- Shear Factors For Beam AnalysisDocument5 pagesShear Factors For Beam AnalysisVivaCharlesNo ratings yet
- SSA 3 TrebuchetDocument9 pagesSSA 3 TrebuchetemomNo ratings yet
- Lab Report Triffilliarc PDFDocument17 pagesLab Report Triffilliarc PDFsohail parachaNo ratings yet
- Report 1 Draft 1Document12 pagesReport 1 Draft 1api-357906388No ratings yet
- Chapter3 LectureDocument48 pagesChapter3 LectureAlaaNo ratings yet
- Deformable - Chapter 5Document21 pagesDeformable - Chapter 5Charlotte FerriolNo ratings yet
- TorsionDocument8 pagesTorsionZewdieNo ratings yet
- Lab Report Experiment 6 - Group 1Document19 pagesLab Report Experiment 6 - Group 1JJyNo ratings yet
- Physics QBDocument61 pagesPhysics QBPraveen KumarNo ratings yet
- TorsionDocument12 pagesTorsionredz00No ratings yet
- Thermodynamics For Engineers 1st Edition Kroos Solutions ManualDocument25 pagesThermodynamics For Engineers 1st Edition Kroos Solutions ManualRhondaFisherjity100% (54)
- Throwing Garbage in The SeaDocument3 pagesThrowing Garbage in The SeaZaramagne CaliboNo ratings yet
- Causes and Detection of Damages - Avinashtaru7129 - OfficialDocument13 pagesCauses and Detection of Damages - Avinashtaru7129 - Officialpratik sawantNo ratings yet
- PBL Final ReportDocument4 pagesPBL Final ReportChester Dave Bal-otNo ratings yet
- The Norwegian Oil Experience:: Helge RyggvikDocument58 pagesThe Norwegian Oil Experience:: Helge RyggvikhiyeonNo ratings yet
- Bloom's Taxonomy Practice MCQsDocument6 pagesBloom's Taxonomy Practice MCQsAbdul RehmanNo ratings yet
- Critical Study of Richard Dawkins, The God DelusionDocument10 pagesCritical Study of Richard Dawkins, The God DelusionJuan Pablo Pardo BarreraNo ratings yet
- SANS 182-2 Conductors For Overhead Electrical Transmission Lines. AACDocument16 pagesSANS 182-2 Conductors For Overhead Electrical Transmission Lines. AACLaxmishankar Katiyar100% (1)
- China Domestic Style Test ProcessDocument2 pagesChina Domestic Style Test ProcessPopper JohnNo ratings yet
- FEM R&S Information Bulletin 10 - Warehouse Building - Racking - FINALDocument21 pagesFEM R&S Information Bulletin 10 - Warehouse Building - Racking - FINALMa PonyNo ratings yet
- Grammar: Frequency AdverbsDocument2 pagesGrammar: Frequency AdverbsRedamanNo ratings yet
- SIM Ecosytem (Grade 6)Document26 pagesSIM Ecosytem (Grade 6)Donnaville Baja VildosolaNo ratings yet
- Boolean Algebra Part 2Document10 pagesBoolean Algebra Part 2Md. Masum Latif Chowdhury (201016006)No ratings yet
- Thermoports K-KB Series Operating InstructionsDocument5 pagesThermoports K-KB Series Operating InstructionsMuhammad Ali HaiderNo ratings yet
- Pathways 4 Listening & Speaking Unit 4 TestDocument8 pagesPathways 4 Listening & Speaking Unit 4 TestaLeKs GaRcíA100% (1)
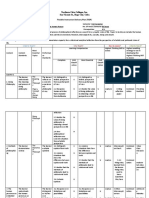
- Northern Cebu Colleges, Inc. San Vicente ST., Bogo City, Cebu Flexible Instruction Delivery Plan (FIDP)Document6 pagesNorthern Cebu Colleges, Inc. San Vicente ST., Bogo City, Cebu Flexible Instruction Delivery Plan (FIDP)Jilmore Caseda Cantal100% (1)
- AP Geography Study Material-AP Geography Quiz Questions With AnswersDocument3 pagesAP Geography Study Material-AP Geography Quiz Questions With AnswersRaja Sekhar BatchuNo ratings yet
- Theory of Corporate PersonalityDocument7 pagesTheory of Corporate PersonalityKabita SharmaNo ratings yet
- Introduction To Industrial Laser Materials Processing (Rofin-Rinar Laser) (Z-Lib - Org) - 1Document143 pagesIntroduction To Industrial Laser Materials Processing (Rofin-Rinar Laser) (Z-Lib - Org) - 1bayou71usaNo ratings yet
- Sony DVR-VX2000 ManualDocument92 pagesSony DVR-VX2000 ManualHenryNo ratings yet
- Mark Scheme (Results) : Summer 2017Document22 pagesMark Scheme (Results) : Summer 2017Khalid AhmedNo ratings yet
- Science and Technology and Nation BuildingDocument16 pagesScience and Technology and Nation BuildingJm BalessNo ratings yet
- Dani Extreme V3 Manual PDFDocument14 pagesDani Extreme V3 Manual PDFHumbertoJaimeNo ratings yet
- My Side of The Mountain PDFDocument61 pagesMy Side of The Mountain PDF12333% (3)
- Earth & Life Science: Quarter 2-Week 1Document7 pagesEarth & Life Science: Quarter 2-Week 1katy PNo ratings yet
- Why SKF? SKF Explorer Deep Groove Ball Bearings: Product FeaturesDocument2 pagesWhy SKF? SKF Explorer Deep Groove Ball Bearings: Product FeaturesShajib RasheedNo ratings yet
- Algonquin College International Business Management: International Marketing Professor-Clarecia ChristieDocument3 pagesAlgonquin College International Business Management: International Marketing Professor-Clarecia ChristieMudit GoelNo ratings yet
- Historical FoundationDocument13 pagesHistorical Foundationᜃᜒᜈ᜔ᜎᜒ ᜇᜒᜋᜈ᜔ᜇᜒᜋᜈ᜔No ratings yet
- Eclipse Phase 2E v1.1 (Under CC BY-NC-SA 4.0 License)Document59 pagesEclipse Phase 2E v1.1 (Under CC BY-NC-SA 4.0 License)humanzyxNo ratings yet
- Community Health Nursing BookDocument96 pagesCommunity Health Nursing BookSamantha Renei SanchezNo ratings yet
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- Who Tells the Truth?: Collection of Logical Puzzles to Make You ThinkFrom EverandWho Tells the Truth?: Collection of Logical Puzzles to Make You ThinkRating: 5 out of 5 stars5/5 (1)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (79)
- Assessment Prep for Common Core Mathematics, Grade 6From EverandAssessment Prep for Common Core Mathematics, Grade 6Rating: 5 out of 5 stars5/5 (1)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceFrom EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceNo ratings yet