You might also like
- Motion Control ReportFrom EverandMotion Control ReportRating: 4 out of 5 stars4/5 (1)
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
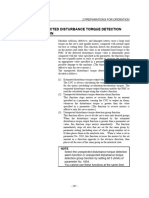
- Unexpected Disturbance TorqueDocument20 pagesUnexpected Disturbance TorqueQuyen VuongNo ratings yet
- 950H KabaryDocument25 pages950H KabaryAhmed HamzaNo ratings yet
- Sieps80000046l 20 1Document384 pagesSieps80000046l 20 1Ananthu UnnikrishnanNo ratings yet
- Service Bulletin Trucks: Instrumentation TroubleshootingDocument4 pagesService Bulletin Trucks: Instrumentation Troubleshootingsetiup holjiNo ratings yet
- Crane AC Drive Technical ManualDocument71 pagesCrane AC Drive Technical ManualKavinda GehanNo ratings yet
- ECMM2Document5 pagesECMM202031989No ratings yet
- Rigid Tapping Troubleshooting GuideDocument6 pagesRigid Tapping Troubleshooting GuideTony AntonyNo ratings yet
- Yaskawa Manuals 4200Document435 pagesYaskawa Manuals 4200lopezsanchezjoseadrian7No ratings yet
- Software 78Document12 pagesSoftware 78Brayan Sánchez ParedesNo ratings yet
- Servo Tuning TutorialDocument38 pagesServo Tuning TutorialpranavNo ratings yet
- Lathe Serial Servo Turret With Lio-Shing Turret - Development Manual (ROT Component)Document14 pagesLathe Serial Servo Turret With Lio-Shing Turret - Development Manual (ROT Component)charlechenNo ratings yet
- Hunter 15317164Document214 pagesHunter 15317164Jose CasasNo ratings yet
- C2000 Drive IM With TQC Sensorless PDFDocument4 pagesC2000 Drive IM With TQC Sensorless PDFDmitry VALEGURANo ratings yet
- V1.0 - 1901007 IS550 20140815 (104 123) .ZH CN - enDocument20 pagesV1.0 - 1901007 IS550 20140815 (104 123) .ZH CN - enckatiNo ratings yet
- Torque Control Manual 6559 PDFDocument27 pagesTorque Control Manual 6559 PDFMarran AlmarraniNo ratings yet
- Torquecontrolofsinamicsv90 enDocument10 pagesTorquecontrolofsinamicsv90 enUlisses AlbuquerqueNo ratings yet
- Sieps80000046j 15 0Document378 pagesSieps80000046j 15 0Ulrich angel Fodouop kamdemNo ratings yet
- Add Info B-65270EN 08Document86 pagesAdd Info B-65270EN 08clausNo ratings yet
- Auto Tune Regent DriveDocument6 pagesAuto Tune Regent DriveTikno PurwantoNo ratings yet
- Sieps80000093c 4 0Document410 pagesSieps80000093c 4 0Vòng Huy HoàngNo ratings yet
- Yaskawa Sigma V 02Document430 pagesYaskawa Sigma V 02thanh_cdt01100% (1)
- Image Processing of Sidescan SonarDocument7 pagesImage Processing of Sidescan SonarAlex NicksonNo ratings yet
- Adjustment of Servo System : (Trial Run of Unit / Trial Run Combined With Mechanism)Document7 pagesAdjustment of Servo System : (Trial Run of Unit / Trial Run Combined With Mechanism)Chandru ChristurajNo ratings yet
- LCDA630 driver manual 2023 (1)_014759Document540 pagesLCDA630 driver manual 2023 (1)_014759Tegar BramantyoNo ratings yet
- YaskawaDocument375 pagesYaskawaCristian IozsaNo ratings yet
- UniMAT Servo Set ManualDocument84 pagesUniMAT Servo Set ManualGilberto Figueroa100% (1)
- Sieps80000098c 2 0 PDFDocument363 pagesSieps80000098c 2 0 PDFCarlos RuizNo ratings yet
- TM G5SW 045Document13 pagesTM G5SW 045HumbertoNo ratings yet
- NI Stepper Motion System Selection GuideDocument8 pagesNI Stepper Motion System Selection GuideSri_CbeNo ratings yet
- Basic of Servomotor ControlDocument13 pagesBasic of Servomotor Controlmunendra_muni9896No ratings yet
- Manual Do Usuario L?-V-SD SeriesDocument340 pagesManual Do Usuario L?-V-SD SeriesEdimilson RodriguesNo ratings yet
- SGDV Servopack PDFDocument398 pagesSGDV Servopack PDFMuryadiNo ratings yet
- Troubleshooting From I571-E2-03 G5 (AP)Document25 pagesTroubleshooting From I571-E2-03 G5 (AP)ImamNo ratings yet
- Manuals MISHUBISHI PDFDocument143 pagesManuals MISHUBISHI PDFVanHoangNo ratings yet
- Notice of the Update of Digital Servo Software for Series 30i/31i/32iDocument87 pagesNotice of the Update of Digital Servo Software for Series 30i/31i/32itharhtike kyiNo ratings yet
- Sensorless Vector Control SetupDocument6 pagesSensorless Vector Control SetupDavid MartinNo ratings yet
- Guide Book - L7S Speed E V1.1Document21 pagesGuide Book - L7S Speed E V1.1huylong101No ratings yet
- ACS380 Machinery Control Program v2.04.0Document4 pagesACS380 Machinery Control Program v2.04.0sorangel_123No ratings yet
- SKF TMEA2manualDocument378 pagesSKF TMEA2manualLeon Montana100% (2)
- Application Note: Custom Delta Robot Motor TuningDocument34 pagesApplication Note: Custom Delta Robot Motor TuningAlberto EnestrillaNo ratings yet
- Parker Rotary KnifeDocument14 pagesParker Rotary KnifeNaveen NagarNo ratings yet
- Automated Guided Vehicle: System Configuration)Document8 pagesAutomated Guided Vehicle: System Configuration)Rafael GagoNo ratings yet
- HPV1000-App - Note - 34 - HPV1000 DCP Guide R1.1aDocument6 pagesHPV1000-App - Note - 34 - HPV1000 DCP Guide R1.1am.alfarez87gmail.comNo ratings yet
- Basic Parameter Setting Needs To Be Done To Run Two Servo and One Spindle - For 0i-FDocument6 pagesBasic Parameter Setting Needs To Be Done To Run Two Servo and One Spindle - For 0i-FAdvance CNC TechnologiesNo ratings yet
- Intelilite: New Features ListDocument16 pagesIntelilite: New Features ListMario Isaias Hernandez IsabelNo ratings yet
- Rm5 Operation Manual (1-38Document45 pagesRm5 Operation Manual (1-38tonnytoons67% (3)
- EZZ023535 - Synchronous ControlDocument36 pagesEZZ023535 - Synchronous ControlJefersonStreitNo ratings yet
- DBW 4 ManualDocument21 pagesDBW 4 ManualsilverfrostlscNo ratings yet
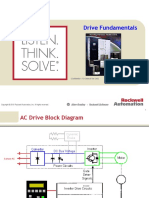
- Drive Fundamentals GDDocument18 pagesDrive Fundamentals GDAlbinNavaNo ratings yet
- LHB Coach Maintenance HandbookDocument28 pagesLHB Coach Maintenance HandbookMUZZAMMILSHERIFF89% (9)
- 828D Servo OptimisationDocument64 pages828D Servo OptimisationMateus Mugnol toigoNo ratings yet
- IGS-NT 4.3.1 New Features ListDocument33 pagesIGS-NT 4.3.1 New Features ListJo RoNo ratings yet
- Moog-ServoDrives-RMC T161 Operating Instructions en 10VDocument112 pagesMoog-ServoDrives-RMC T161 Operating Instructions en 10VJorge SarmientoNo ratings yet
- EZZ023535Document35 pagesEZZ023535fr946ntyjgNo ratings yet
- Multivariable Predictive Control: Applications in IndustryFrom EverandMultivariable Predictive Control: Applications in IndustryNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Calculating Calories for Weight Training SuccessDocument12 pagesCalculating Calories for Weight Training SuccessFadil Arif MuhammadNo ratings yet
- What Is MotivationDocument6 pagesWhat Is MotivationJohn Paul De GuzmanNo ratings yet
- SALICYLATE POISONING SIGNS AND TREATMENTDocument23 pagesSALICYLATE POISONING SIGNS AND TREATMENTimmortalneoNo ratings yet
- Policy Based Routing On Fortigate FirewallDocument2 pagesPolicy Based Routing On Fortigate FirewalldanNo ratings yet
- Holden Commodore Sedan VT To VZDocument6 pagesHolden Commodore Sedan VT To VZابو سعدNo ratings yet
- A Cause For Our Times: Oxfam - The First 50 YearsDocument81 pagesA Cause For Our Times: Oxfam - The First 50 YearsOxfamNo ratings yet
- ENGLISH 7 FIRST QUARTER EXAMDocument2 pagesENGLISH 7 FIRST QUARTER EXAMAlleli Faith Leyritana100% (1)
- Major Discoveries in Science HistoryDocument7 pagesMajor Discoveries in Science HistoryRoland AbelaNo ratings yet
- Climate Bogeyman3 PDFDocument199 pagesClimate Bogeyman3 PDFIonel Leon100% (1)
- ACCT250-Auditing Course OutlineDocument7 pagesACCT250-Auditing Course OutlineammadNo ratings yet
- Lab Report 4 - Group 6Document15 pagesLab Report 4 - Group 6ClarisshaNo ratings yet
- Lesson 5 Classifications of CommunicationDocument48 pagesLesson 5 Classifications of CommunicationRovenick SinggaNo ratings yet
- Lab Manual 06 CSE 314 Sequence and Communication DiagramDocument6 pagesLab Manual 06 CSE 314 Sequence and Communication DiagramMufizul islam NirobNo ratings yet
- DepEd Memorandum on SHS Curriculum MappingDocument8 pagesDepEd Memorandum on SHS Curriculum MappingMichevelli RiveraNo ratings yet
- First Communion Liturgy: Bread Broken and SharedDocument11 pagesFirst Communion Liturgy: Bread Broken and SharedRomayne Brillantes100% (1)
- 6 Fsiqiatria-1524041346Document48 pages6 Fsiqiatria-1524041346მირანდა გიორგაშვილიNo ratings yet
- Baltimore County IG ReportDocument35 pagesBaltimore County IG ReportChris BerinatoNo ratings yet
- Architecture Floor Plan Abbreviations AnDocument11 pagesArchitecture Floor Plan Abbreviations AnGraphitti Koncepts and DesignsNo ratings yet
- Surrealismo TriplevDocument13 pagesSurrealismo TriplevVictor LunaNo ratings yet
- ISL201-Solved MCQs 100 - Correct For Mid Term Papers (WWW - Virtualstudysolutions.blogspot - Com)Document70 pagesISL201-Solved MCQs 100 - Correct For Mid Term Papers (WWW - Virtualstudysolutions.blogspot - Com)bc190200669 BUSHRANo ratings yet
- Thesis Chapter 123Document15 pagesThesis Chapter 123Chesca Mae PenalosaNo ratings yet
- How to Launder Money in Real EstateDocument58 pagesHow to Launder Money in Real EstateSpeedyGonsalesNo ratings yet
- Food and Beverages Service: Learning MaterialsDocument24 pagesFood and Beverages Service: Learning MaterialsJoshua CondeNo ratings yet
- A. Pawnshops 4. B. Pawner 5. C. Pawnee D. Pawn 6. E. Pawn Ticket 7. F. Property G. Stock H. Bulky Pawns 8. I. Service Charge 9. 10Document18 pagesA. Pawnshops 4. B. Pawner 5. C. Pawnee D. Pawn 6. E. Pawn Ticket 7. F. Property G. Stock H. Bulky Pawns 8. I. Service Charge 9. 10Darwin SolanoyNo ratings yet
- Prompt 2022Document12 pagesPrompt 2022cecilferrosNo ratings yet
- Make Money OnlineDocument9 pagesMake Money OnlineTimiNo ratings yet
- SMEspdfDocument13 pagesSMEspdflilpumpdidnothingwrong dNo ratings yet
- Royal Scythians and the Slave Trade in HerodotusDocument19 pagesRoyal Scythians and the Slave Trade in HerodotusSinan SakicNo ratings yet
- Group Assgnmt 8 Rev080515Document9 pagesGroup Assgnmt 8 Rev080515Suhaila NamakuNo ratings yet
- BHEL Doctors - Mobile Number and Email IdDocument11 pagesBHEL Doctors - Mobile Number and Email IdCHANDRAN MAHA100% (1)