You might also like
- An Intelligent Motion Detection Using Open CVDocument13 pagesAn Intelligent Motion Detection Using Open CVanshupriya380No ratings yet
- BSPC D 24 01669 - ReviewerDocument19 pagesBSPC D 24 01669 - ReviewerokuwobiNo ratings yet
- Computer Vision Based Moving Object Detection and Tracking: Suresh Kumar, Prof. Yatin Kumar AgarwalDocument6 pagesComputer Vision Based Moving Object Detection and Tracking: Suresh Kumar, Prof. Yatin Kumar Agarwalikhwancules46No ratings yet
- A Review On Motion Detection TechniquesDocument5 pagesA Review On Motion Detection TechniquesEditor IJTSRDNo ratings yet
- Object Detection and Tracking For Surveillance System: Payal Patoliya, Prof. Md. Salman R. BombaywalaDocument7 pagesObject Detection and Tracking For Surveillance System: Payal Patoliya, Prof. Md. Salman R. BombaywalaerpublicationNo ratings yet
- Video Surveillance SystemsDocument9 pagesVideo Surveillance SystemsAmine AminovichNo ratings yet
- Feature-Level Based Video Fusion For Object DetectionDocument6 pagesFeature-Level Based Video Fusion For Object Detectionvasece4537577No ratings yet
- CNN LSTMDocument5 pagesCNN LSTMEngr. Naveed MazharNo ratings yet
- Security Application of Computer VisionDocument6 pagesSecurity Application of Computer VisionKirana ShreeNo ratings yet
- Conception and Development of A Video Surveillance System For Detecting Tracking and Profile Analysis of A PersonDocument5 pagesConception and Development of A Video Surveillance System For Detecting Tracking and Profile Analysis of A Persondineth.gdNo ratings yet
- Publish PaperDocument6 pagesPublish PaperSrinadh ChekuriNo ratings yet
- Intelligent: Vision Processing in For Mass Transport SecurityDocument4 pagesIntelligent: Vision Processing in For Mass Transport SecurityicanbarleyreadNo ratings yet
- 1207 6774 PDFDocument14 pages1207 6774 PDFLee DestructeurNo ratings yet
- Suspicious Human Activity Detection SystemDocument11 pagesSuspicious Human Activity Detection Systembmahalakshmi775No ratings yet
- A Comprehensive Review On Advance Surveillance SystemDocument7 pagesA Comprehensive Review On Advance Surveillance SystemIJRASETPublicationsNo ratings yet
- Image Processing Techniques For Object Tracking in Video Surveillance A Survey 2015 2Document6 pagesImage Processing Techniques For Object Tracking in Video Surveillance A Survey 2015 2Alexis DieufaitNo ratings yet
- Real-Time Multiple Object Tracking Using Deep Learning Methods2021Document30 pagesReal-Time Multiple Object Tracking Using Deep Learning Methods2021sadeqNo ratings yet
- 14166-Article Text-25243-1-10-20231018Document7 pages14166-Article Text-25243-1-10-20231018ahmedalhaswehNo ratings yet
- Object Motion Detection in Video Frames Using Background Frame MatchingDocument4 pagesObject Motion Detection in Video Frames Using Background Frame MatchingseventhsensegroupNo ratings yet
- 2011-Intro-Md-Motion Detection and Analysis With Four Different DetectorsDocument5 pages2011-Intro-Md-Motion Detection and Analysis With Four Different DetectorsM FarhanNo ratings yet
- Article 1Document9 pagesArticle 1sandhyasbfcNo ratings yet
- Object Tracking Podium On Region Covariance For Recognition and ClassificationDocument6 pagesObject Tracking Podium On Region Covariance For Recognition and ClassificationInternational Association of Scientific Innovations and Research (IASIR)No ratings yet
- Divya Phase 2 ReportDocument51 pagesDivya Phase 2 ReportMost WantedNo ratings yet
- Morphology Based Moving Vehicle DetectionDocument7 pagesMorphology Based Moving Vehicle DetectionPranjali SawantNo ratings yet
- Automatic Video Surveillance System For Pedestrian Crossing Using Digital Image ProcessingDocument7 pagesAutomatic Video Surveillance System For Pedestrian Crossing Using Digital Image ProcessingNeha SinhaNo ratings yet
- Heterogeneous Information Fusion and Visualization For A Large-Scale Intelligent Video Surveillance SystemDocument13 pagesHeterogeneous Information Fusion and Visualization For A Large-Scale Intelligent Video Surveillance SystemLazuardi QayumaNo ratings yet
- Peerj Cs 07 402Document23 pagesPeerj Cs 07 402Hieu NNo ratings yet
- Unifying Foundation Models With Quadrotor Control For Visual Tracking Beyond Object Categories - 2310.04781Document8 pagesUnifying Foundation Models With Quadrotor Control For Visual Tracking Beyond Object Categories - 2310.04781ox1c14x16b2fx1d84x16a53xab9eNo ratings yet
- Live Object Recognition Using YOLODocument5 pagesLive Object Recognition Using YOLOInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Review of Violence Detection System.Document4 pagesReview of Violence Detection System.Vishwajit DandageNo ratings yet
- 10 1109icraie 2018 8710421Document7 pages10 1109icraie 2018 8710421Muhammad NourNo ratings yet
- Real Time Moving Human Detection Using HOG and Fourier Descriptor Based On CUDA ImplementationDocument16 pagesReal Time Moving Human Detection Using HOG and Fourier Descriptor Based On CUDA Implementationsayadi fatmaNo ratings yet
- (IJIT-V6I4P11) :madhankumar YDocument6 pages(IJIT-V6I4P11) :madhankumar YIJITJournalsNo ratings yet
- Motion Based Summarization and Grouping of Events For Video Surveillance SystemDocument3 pagesMotion Based Summarization and Grouping of Events For Video Surveillance SystemInnovative Research PublicationsNo ratings yet
- An Intelligent Motion Detection Using Open CVDocument14 pagesAn Intelligent Motion Detection Using Open CVestela dllNo ratings yet
- Object Detection Classification and Tracking of Everyday Common ObjectsDocument5 pagesObject Detection Classification and Tracking of Everyday Common ObjectsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Implementation of Human Tracking Using Back Propagation AlgorithmDocument4 pagesImplementation of Human Tracking Using Back Propagation Algorithmpurushothaman sinivasanNo ratings yet
- Implementation of A Novel Algorithm For Moving Object Tracking in Video SurveillanceDocument9 pagesImplementation of A Novel Algorithm For Moving Object Tracking in Video SurveillancesanjayshelarNo ratings yet
- Object DetectionDocument7 pagesObject DetectionJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Frontiers PaperDocument26 pagesFrontiers PaperDr-Anwar ShahNo ratings yet
- Dynamic Swarm Particle For Fast Motion Vehicle TrackingDocument13 pagesDynamic Swarm Particle For Fast Motion Vehicle Trackingrushendra.umbNo ratings yet
- Human Fall Detection Using Optical Flow Farne BackDocument15 pagesHuman Fall Detection Using Optical Flow Farne Backkandulaanusha20No ratings yet
- Implementation of Real-Time Object Detection System Using Machine Learning AlgorithmDocument12 pagesImplementation of Real-Time Object Detection System Using Machine Learning AlgorithmIJRASETPublications100% (1)
- An Implementation of Moving Object Detection, Tracking and Counting Objects For Traffic Surveillance SystemDocument6 pagesAn Implementation of Moving Object Detection, Tracking and Counting Objects For Traffic Surveillance Systematdeen sNo ratings yet
- Multi-Stream Siamese and Faster Region-Based Neural Network For Real-Time Object TrackingDocument14 pagesMulti-Stream Siamese and Faster Region-Based Neural Network For Real-Time Object TrackingAnanya SinghNo ratings yet
- IJERTV3IS100721Document11 pagesIJERTV3IS100721Hải vlogNo ratings yet
- Video Surveillance Systems - A Survey: KeywordsDocument8 pagesVideo Surveillance Systems - A Survey: KeywordsMuhammad Faizan WaraichNo ratings yet
- An Insight Into The Algorithms On Real-Time People Tracking and Counting SystemDocument6 pagesAn Insight Into The Algorithms On Real-Time People Tracking and Counting SystemRandy ArtNo ratings yet
- Deep Learning Approach For Suspicious Activity Detection From Surveillance VideoDocument6 pagesDeep Learning Approach For Suspicious Activity Detection From Surveillance VideoNeha SharmaNo ratings yet
- Naeem2013 PDFDocument6 pagesNaeem2013 PDFImran BashaNo ratings yet
- Applied Soft Computing Journal: Leiyue Yao, Wei Yang, Wei HuangDocument10 pagesApplied Soft Computing Journal: Leiyue Yao, Wei Yang, Wei HuangFriji RachaNo ratings yet
- A Study On Smart Video Security For Banks Using Mobile Remote ControlDocument4 pagesA Study On Smart Video Security For Banks Using Mobile Remote ControlInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Anamolous Behaviour Detection Using Lucas Kanade and Harris Corner DetectorDocument5 pagesAnamolous Behaviour Detection Using Lucas Kanade and Harris Corner DetectorInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Special Section On Integrative ComputerDocument10 pagesSpecial Section On Integrative ComputerVictor SeguraNo ratings yet
- Real Time Smart Object Detection Using Machine LearningDocument28 pagesReal Time Smart Object Detection Using Machine LearningIJRASETPublications100% (1)
- Review paper-HARDocument3 pagesReview paper-HARJhalak DeyNo ratings yet
- Human Activity Detection Using Deep - 2-1Document8 pagesHuman Activity Detection Using Deep - 2-1Riky Tri YunardiNo ratings yet
- Information: Human Activity Recognition For Production and Logistics-A Systematic Literature ReviewDocument28 pagesInformation: Human Activity Recognition For Production and Logistics-A Systematic Literature ReviewJorge JiménezNo ratings yet
- Surveillance Robot For Tracking Multiple Moving TargetsDocument7 pagesSurveillance Robot For Tracking Multiple Moving Targetspurushothaman sinivasanNo ratings yet
- Key Term Arabic Meaning Link: Life ScienceDocument5 pagesKey Term Arabic Meaning Link: Life ScienceReemNo ratings yet
- Rack Interface Module 3500 20SDocument71 pagesRack Interface Module 3500 20SmaheshNo ratings yet
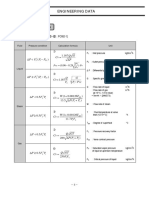
- Engineering Data: 2. CV CalculationDocument1 pageEngineering Data: 2. CV Calculationdj22500No ratings yet
- 4 MFL67658602 00 160519 1Document329 pages4 MFL67658602 00 160519 1Cédric MorisotNo ratings yet
- Lesson PlanDocument11 pagesLesson PlanKim Gabrielle Del PuertoNo ratings yet
- Advanced Numerical Modelling of Geogrids and Steel Wire Meshes - Daniele TubertiniDocument94 pagesAdvanced Numerical Modelling of Geogrids and Steel Wire Meshes - Daniele TubertiniSze Mian KuehNo ratings yet
- AquaMapPublic v202Document26 pagesAquaMapPublic v202engfeupNo ratings yet
- Adient Managment CSRDocument68 pagesAdient Managment CSRClaudia PEÑANo ratings yet
- Safety Data Sheet: Soda AshDocument4 pagesSafety Data Sheet: Soda AshBaher SaidNo ratings yet
- Measuring PovertyDocument47 pagesMeasuring PovertyPranabes DuttaNo ratings yet
- Healing GardensDocument7 pagesHealing GardensElvaNo ratings yet
- Cop4600 Exam1 sp13Document2 pagesCop4600 Exam1 sp13chavNo ratings yet
- Connecting Your Database and Auto Generate ID Using VB - Net 2008 and MySQL DatabaseDocument1 pageConnecting Your Database and Auto Generate ID Using VB - Net 2008 and MySQL DatabaseAgusWibowoNo ratings yet
- Metaphor-Spatiality-Discourse - 10-11 July 2020 - Programme - FINALDocument6 pagesMetaphor-Spatiality-Discourse - 10-11 July 2020 - Programme - FINALkostyelNo ratings yet
- STIGA - Vue Eclatée Moteur BRIGGS & STRATTONDocument32 pagesSTIGA - Vue Eclatée Moteur BRIGGS & STRATTONregis.petitjeanNo ratings yet
- Worksheet - StatisticsDocument3 pagesWorksheet - StatisticsGabriel Ch MendezNo ratings yet
- Reviewer in Contact Center Services NC IIDocument12 pagesReviewer in Contact Center Services NC IIRonalei TañedoNo ratings yet
- AIMS Manual - 2021Document82 pagesAIMS Manual - 2021Randyll TarlyNo ratings yet
- 4 Chacon Et Al 2004Document7 pages4 Chacon Et Al 2004Luis Serrano CortezNo ratings yet
- HTTPHeader LiveDocument199 pagesHTTPHeader LiveDenys BautistaNo ratings yet
- ROV Inspection and Intervention VesselDocument2 pagesROV Inspection and Intervention VesselAhmad Reza AtefNo ratings yet
- Iron Man Helmet Papercraft Template PDFDocument4 pagesIron Man Helmet Papercraft Template PDFNishant Khandekar25% (8)
- Avenger 220 Cruise Street BS IVDocument79 pagesAvenger 220 Cruise Street BS IVShubham AatopartsNo ratings yet
- UntitledDocument44 pagesUntitledFrancesco TauroNo ratings yet
- ECM 206 Site VisitDocument36 pagesECM 206 Site VisitAZUAN BIN AHMAD FAUZI100% (2)
- AirBossPSS100andEvoplusseriesscba Donning ProcedureDocument1 pageAirBossPSS100andEvoplusseriesscba Donning ProcedureMarco LondonNo ratings yet
- 78-SAFETY - QUESTIO in PDFDocument21 pages78-SAFETY - QUESTIO in PDFIndermohan MehtaNo ratings yet
- CHCDIV001 - Student Assessment Booklet ECEC.v2.0Document59 pagesCHCDIV001 - Student Assessment Booklet ECEC.v2.0Dink DinkNo ratings yet
- Tavistock PrimerDocument13 pagesTavistock PrimerSharon Schaff100% (1)
- Grade 4 SYLLABUS Check Point 1Document2 pagesGrade 4 SYLLABUS Check Point 1Muhammad HassaanNo ratings yet
- PHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZFrom EverandPHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZNo ratings yet
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNFrom EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNRating: 5 out of 5 stars5/5 (1)
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringFrom EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringRating: 5 out of 5 stars5/5 (40)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- Microsoft Certified Azure Fundamentals Study Guide: Exam AZ-900From EverandMicrosoft Certified Azure Fundamentals Study Guide: Exam AZ-900No ratings yet
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- Networking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366From EverandNetworking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366No ratings yet
- Software-Defined Networks: A Systems ApproachFrom EverandSoftware-Defined Networks: A Systems ApproachRating: 5 out of 5 stars5/5 (1)
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.From EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Rating: 5 out of 5 stars5/5 (2)
- Concise Guide to OTN optical transport networksFrom EverandConcise Guide to OTN optical transport networksRating: 4 out of 5 stars4/5 (2)
- Azure Networking: Command Line Mastery From Beginner To ArchitectFrom EverandAzure Networking: Command Line Mastery From Beginner To ArchitectNo ratings yet
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxFrom EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxRating: 4.5 out of 5 stars4.5/5 (67)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- Alcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsFrom EverandAlcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsNo ratings yet
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)