You might also like
- Design of A Lateral Motion Controller For A Small Unmanned Aerial Vehicle (SUAV)Document6 pagesDesign of A Lateral Motion Controller For A Small Unmanned Aerial Vehicle (SUAV)Adrian DincaNo ratings yet
- Fin Actuation System in A MissileDocument6 pagesFin Actuation System in A MissileSaurabh Sawant100% (2)
- Design of Missile Two-Loop Auto-Pilot Pitch Using Root LocusDocument6 pagesDesign of Missile Two-Loop Auto-Pilot Pitch Using Root LocusLukkana VaraprasadNo ratings yet
- Er Giner 2012 VtolDocument10 pagesEr Giner 2012 VtolAtharva SalunkheNo ratings yet
- Missile Flight Control Systems ExplainedDocument16 pagesMissile Flight Control Systems ExplainedrobjohniiiNo ratings yet
- Missile Guidance Laws: NITHIN KUMAR. V. P, 4NI13ME081, 7 Semester B' SectionDocument12 pagesMissile Guidance Laws: NITHIN KUMAR. V. P, 4NI13ME081, 7 Semester B' SectionNithin GowdaNo ratings yet
- Feedback Linearization and High Order Sliding Mode Observer For A Quadrotor UAVDocument8 pagesFeedback Linearization and High Order Sliding Mode Observer For A Quadrotor UAVVictor Hugo OrtizNo ratings yet
- Chapter 15 Guidance and ControlDocument20 pagesChapter 15 Guidance and ControlpriyadarshinimpNo ratings yet
- Autopilot Control SystemDocument13 pagesAutopilot Control SystemGamePlay DistinctNo ratings yet
- Heba ElKholy Thesis S2014Document13 pagesHeba ElKholy Thesis S2014AlexandraAndreeaNo ratings yet
- Overview of Missile Flight Control SystemsDocument16 pagesOverview of Missile Flight Control SystemsnnutkumhangNo ratings yet
- CEP AssignmentDocument9 pagesCEP AssignmentMUHAMMAD RASHIDNo ratings yet
- Mracek 2014Document7 pagesMracek 2014AhsanshehzadcfdNo ratings yet
- Design and Implementation of An Autopilot For UAVDocument38 pagesDesign and Implementation of An Autopilot For UAVUTKARSH ALSETNo ratings yet
- Fuzzy-PID Control Algorithm Optimizes Helicopter Flight AttitudeDocument6 pagesFuzzy-PID Control Algorithm Optimizes Helicopter Flight AttitudeskNo ratings yet
- Kamel 2019Document12 pagesKamel 2019Edmund Luke Benedict SimpsonNo ratings yet
- Quadrotor PDFDocument11 pagesQuadrotor PDFMo'menKhaledNo ratings yet
- Yousif Al Mashhadany MSC ThesisDocument121 pagesYousif Al Mashhadany MSC Thesisyousif al mashhadanyNo ratings yet
- AutopilotDocument13 pagesAutopilotvijaya36fNo ratings yet
- Fully Quaternion BasedDocument29 pagesFully Quaternion Basednguyễn công nghĩaNo ratings yet
- Mathematical Modelling and Attitude Control of Quadcopter Based On Classical ControllerDocument7 pagesMathematical Modelling and Attitude Control of Quadcopter Based On Classical ControllerdrenridaNo ratings yet
- 1-Avion No TripuladoDocument7 pages1-Avion No TripuladoJuan Alejandro Cañas ColoradoNo ratings yet
- 273332-Article Text-639470-1-10-20230420Document8 pages273332-Article Text-639470-1-10-20230420prakash saralayaNo ratings yet
- InTech-Using Fuzzy Control For Modeling The Control Behaviour of A Human PilotDocument30 pagesInTech-Using Fuzzy Control For Modeling The Control Behaviour of A Human Pilotm_bazrafkanNo ratings yet
- Guidance, Navigation and Control of Fixed-Wing Unmanned Aerial VehiclesDocument13 pagesGuidance, Navigation and Control of Fixed-Wing Unmanned Aerial VehiclesBHAVESH JOSHINo ratings yet
- Hybrid PID LQ Quadrotor ControllerDocument14 pagesHybrid PID LQ Quadrotor ControllerGhada BeydounNo ratings yet
- Rota Tional Motion P Latform For Emulating SP Ac Ecraft Attitude ControlDocument27 pagesRota Tional Motion P Latform For Emulating SP Ac Ecraft Attitude ControlJose PradoNo ratings yet
- IRJET Modeling and Analysis of Inter Cop-68914792Document5 pagesIRJET Modeling and Analysis of Inter Cop-68914792Dpt HtegnNo ratings yet
- OverviewDocument3 pagesOverviewGopinath SomuNo ratings yet
- Auto PilotDocument9 pagesAuto PilotCrypton GamingNo ratings yet
- Adaptive Neural Controller Stabilizes Quadrotor UAV Using MRASDocument3 pagesAdaptive Neural Controller Stabilizes Quadrotor UAV Using MRASSyed MamnoonNo ratings yet
- InTech-Acceleration Based 3d Flight Control For Uavs Strategy and Longitudinal DesignDocument24 pagesInTech-Acceleration Based 3d Flight Control For Uavs Strategy and Longitudinal DesignAndrei BadulescuNo ratings yet
- Task 1:: (Outcome:2)Document14 pagesTask 1:: (Outcome:2)Rezve AhmedNo ratings yet
- Aircraft Control SystemDocument145 pagesAircraft Control Systemabdel4aliNo ratings yet
- LONGITUDINAL AUTOPILOT-module-4Document31 pagesLONGITUDINAL AUTOPILOT-module-4PALAKURTHI VAMSHI HU21EECE0100134No ratings yet
- 1 s2.0 S1000936107600648 MainDocument9 pages1 s2.0 S1000936107600648 MainpremkumarabburiNo ratings yet
- Pitch Control System Using LQR and Fuzzy Logic Controller: Nurbaiti@tganu - Uitm.edu - My Fuaad@fke - Utm.myDocument6 pagesPitch Control System Using LQR and Fuzzy Logic Controller: Nurbaiti@tganu - Uitm.edu - My Fuaad@fke - Utm.myStefania OliveiraNo ratings yet
- The Personal Quadrotor Project Brief State Report: Jaromir Dvorak (Dvoraj13@fel - Cvut.cz) Horn I Cerekev, October 17, 2010Document14 pagesThe Personal Quadrotor Project Brief State Report: Jaromir Dvorak (Dvoraj13@fel - Cvut.cz) Horn I Cerekev, October 17, 2010Hashem Mohamed HashemNo ratings yet
- Design of Tracking of Moving Target Using PID ControllerDocument4 pagesDesign of Tracking of Moving Target Using PID Controllerchoc_ngoayNo ratings yet
- Paper 2 FinalDocument9 pagesPaper 2 FinalThien MaiNo ratings yet
- Step by Step Robust Nonlinear PI For Attitude Stabilisation of A Four-Rotor Mini-AircraftDocument8 pagesStep by Step Robust Nonlinear PI For Attitude Stabilisation of A Four-Rotor Mini-AircraftSyed MamnoonNo ratings yet
- Aerospace 04 00003sdDocument17 pagesAerospace 04 00003sdnabillNo ratings yet
- Design and Analysis of A Gyroscopically Controlled Micro Air VehicleDocument20 pagesDesign and Analysis of A Gyroscopically Controlled Micro Air VehicleAndres MartinezNo ratings yet
- To Design An Aircraft Control SystemDocument28 pagesTo Design An Aircraft Control SystemAngel RojoNo ratings yet
- Jae Ro 285Document12 pagesJae Ro 285OlidelaPoliNo ratings yet
- Flight Stability and Control Course SyllabusDocument2 pagesFlight Stability and Control Course SyllabusakinojohnkennedyNo ratings yet
- Robust Inverse Dynamics and Sliding Mode Control For Inertial Stabilization SystemsDocument13 pagesRobust Inverse Dynamics and Sliding Mode Control For Inertial Stabilization SystemsAdriano AssisNo ratings yet
- DC Servo Motor Position SystemDocument28 pagesDC Servo Motor Position SystemVincent Korie100% (1)
- Pitch and Yaw Attitude Control of A Rocket Engine Using Hybrid Fuzzy-PID ControllerDocument11 pagesPitch and Yaw Attitude Control of A Rocket Engine Using Hybrid Fuzzy-PID ControllermaryamNo ratings yet
- Autopilot ReportDocument8 pagesAutopilot ReportVasu GuptaNo ratings yet
- 2012, An Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool Box V66-159an Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool BoxDocument4 pages2012, An Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool Box V66-159an Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool BoxAph MazharNo ratings yet
- Design and Simulation of Longitudinal Autopilot Modes For A Conventional AircraftDocument7 pagesDesign and Simulation of Longitudinal Autopilot Modes For A Conventional AircraftDeniz Can ÇetinelNo ratings yet
- A Total Energy Control System Design For The Transition Phase of A Tiltrotor Aerial Vehicle ?Document6 pagesA Total Energy Control System Design For The Transition Phase of A Tiltrotor Aerial Vehicle ?Daniel VelázquezNo ratings yet
- Mathematical Model of Aircraft with Active Landing GearsDocument18 pagesMathematical Model of Aircraft with Active Landing GearsRodrigo Santos FerreiraNo ratings yet
- Control and Navigation System For A Fixed-Wing Unmanned Aerial VehicleDocument11 pagesControl and Navigation System For A Fixed-Wing Unmanned Aerial VehicleAfif PradhanaNo ratings yet
- Recent Developments in Ship Control System DesignDocument4 pagesRecent Developments in Ship Control System DesignManoj KumarNo ratings yet
- UAV GNC Chapter PDFDocument30 pagesUAV GNC Chapter PDFMrZaggyNo ratings yet
- Aeat 05 2019 0099Document10 pagesAeat 05 2019 0099Abdullah Al MarufNo ratings yet
- Nonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentFrom EverandNonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentNo ratings yet
- Missile Interceptor Guidance and ControlDocument6 pagesMissile Interceptor Guidance and ControlDpt HtegnNo ratings yet
- 3703 3713Document11 pages3703 3713Kathryn FigueroaNo ratings yet
- Simulink Missile Control SystemDocument6 pagesSimulink Missile Control SystemDpt HtegnNo ratings yet
- Optimal Approach Autopilot TopologiesDocument30 pagesOptimal Approach Autopilot TopologiesDpt HtegnNo ratings yet
- Target Hit Interceptor Mid Course GuidanDocument6 pagesTarget Hit Interceptor Mid Course GuidanDpt HtegnNo ratings yet
- ICCA2010-SDRE FinalDocument5 pagesICCA2010-SDRE FinalDpt HtegnNo ratings yet
- Simulink Missile Control SystemDocument6 pagesSimulink Missile Control SystemDpt HtegnNo ratings yet
- Ship Borne RFTracking SystemDocument11 pagesShip Borne RFTracking SystemDpt HtegnNo ratings yet
- IRJET Modeling and Analysis of Inter Cop-68914792Document5 pagesIRJET Modeling and Analysis of Inter Cop-68914792Dpt HtegnNo ratings yet
- Navigation SYSDocument25 pagesNavigation SYSDpt HtegnNo ratings yet
- Sensitivity Analysis and Flight Tests ReDocument40 pagesSensitivity Analysis and Flight Tests ReDpt HtegnNo ratings yet
- GNC All NPTELDocument140 pagesGNC All NPTELDpt HtegnNo ratings yet
- Sec - C - TVM 2019 - PW, FW, AW, GR, Nom-EffDocument4 pagesSec - C - TVM 2019 - PW, FW, AW, GR, Nom-EffNaveen KumarNo ratings yet
- Three Plane Approach For 3D True Proportional NavigationDocument26 pagesThree Plane Approach For 3D True Proportional NavigationDpt HtegnNo ratings yet
- Cockpit AvionicsDocument6 pagesCockpit AvionicsAndreNo ratings yet
- ACARS Aircraft Communication System ExplainedDocument20 pagesACARS Aircraft Communication System ExplainedShimpa DarrelNo ratings yet
- Display HMDDocument55 pagesDisplay HMDDpt HtegnNo ratings yet
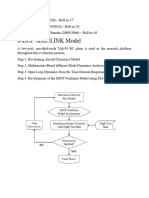
- 6DOF - ANN - Roll No 17,20,36Document8 pages6DOF - ANN - Roll No 17,20,36Dpt HtegnNo ratings yet
- L21-L24 - DepreciationDocument21 pagesL21-L24 - DepreciationDpt HtegnNo ratings yet
- L25-28 Costs - and - Breakeven - SlidesDocument20 pagesL25-28 Costs - and - Breakeven - SlidesDpt HtegnNo ratings yet
- A Study of The Internal Aerodynamics of The Concorde Inlet: John W. SlaterDocument17 pagesA Study of The Internal Aerodynamics of The Concorde Inlet: John W. SlaterDpt HtegnNo ratings yet
- Efficient Computation of The DFT: Fast Fourier Transform AlgorithmsDocument40 pagesEfficient Computation of The DFT: Fast Fourier Transform AlgorithmsDpt HtegnNo ratings yet
- EE - L2 To L6 - Time Value of Money Compount Interest FormulasDocument30 pagesEE - L2 To L6 - Time Value of Money Compount Interest FormulasganeshNo ratings yet
- Powder Metallurgy& Heat Treatment of Steel Final PresentationDocument85 pagesPowder Metallurgy& Heat Treatment of Steel Final PresentationDpt HtegnNo ratings yet
- Operational and Technological DirectionsDocument18 pagesOperational and Technological DirectionsDpt HtegnNo ratings yet
- Operational and Technological DirectionsDocument18 pagesOperational and Technological DirectionsDpt HtegnNo ratings yet
- Dept. of Aero & Auto, M.I.T, ManipalDocument138 pagesDept. of Aero & Auto, M.I.T, ManipalDpt HtegnNo ratings yet
- HPDM-250 Datasheet v1.7Document1 pageHPDM-250 Datasheet v1.7Dpt HtegnNo ratings yet
- Manufacturing Processes and Powder MetallurgyDocument56 pagesManufacturing Processes and Powder MetallurgyDpt HtegnNo ratings yet
- MCC Engineer & Aircraft Maintenance Engineer B1 CV Ahsan MujeebDocument4 pagesMCC Engineer & Aircraft Maintenance Engineer B1 CV Ahsan MujeebahsanmujeebNo ratings yet
- Aerodynamics-AeroEngineering-MODULE 1Document21 pagesAerodynamics-AeroEngineering-MODULE 1GADDI Noel Jr. N.No ratings yet
- Gya460 ManualDocument28 pagesGya460 ManualXelunelNo ratings yet
- Inspect Main Rotor Flight Control System BoltsDocument4 pagesInspect Main Rotor Flight Control System BoltsKraven YagamyNo ratings yet
- Su1 Assessment U01 U05 Review TestDocument18 pagesSu1 Assessment U01 U05 Review TestVũ Minh Hiếu0% (1)
- Air Transport Planning and DesignDocument78 pagesAir Transport Planning and DesignAbhishek SinghNo ratings yet
- RMF Cai-59Document1 pageRMF Cai-59Abu MsrNo ratings yet
- Atpl Pof 1-16Document16 pagesAtpl Pof 1-16blessedbuddhaNo ratings yet
- Boeing X-37: DevelopmentDocument20 pagesBoeing X-37: Developmentmellinger100No ratings yet
- Aircraft Charter Guide: Key Terms & DefinitionsDocument11 pagesAircraft Charter Guide: Key Terms & DefinitionsSuliman Omar100% (1)
- Technical English For Aerospace EngDocument6 pagesTechnical English For Aerospace EngAyşenur ÇetinNo ratings yet
- Water Rocket with Lander Project ReportDocument19 pagesWater Rocket with Lander Project ReportThe AlphabetsNo ratings yet
- CS300APP Issue008 15mar2018 PDFDocument194 pagesCS300APP Issue008 15mar2018 PDFyang Alfred100% (1)
- CE-750 Specifications and DescriptionsDocument32 pagesCE-750 Specifications and DescriptionsbrianNo ratings yet
- Commercial Space Station DatasheetDocument2 pagesCommercial Space Station DatasheetPedro LeonNo ratings yet
- Database Lab Assignment ReportDocument11 pagesDatabase Lab Assignment ReportprakashNo ratings yet
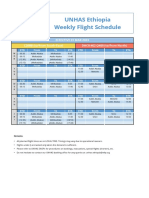
- UNHAS Ethiopia Weekly Flight Schedule March 2023Document1 pageUNHAS Ethiopia Weekly Flight Schedule March 2023Dereje ANo ratings yet
- African American Groundbreakers at The SmithsonianDocument11 pagesAfrican American Groundbreakers at The SmithsonianMaeveGlaistigNo ratings yet
- Lsza GNDDocument1 pageLsza GNDmatteomanmanNo ratings yet
- OME Booklet Issue 5Document95 pagesOME Booklet Issue 5Liz MendozaNo ratings yet
- 604 Weight & Balance ManualDocument238 pages604 Weight & Balance ManualMartin MoyanoNo ratings yet
- 2019-09-01Document8 pages2019-09-01sahandonfireNo ratings yet
- Technical Guide to Alternator Shaft StiffnessDocument9 pagesTechnical Guide to Alternator Shaft StiffnessplennyNo ratings yet
- Bristol Brigand Flight ManualDocument38 pagesBristol Brigand Flight Manualsamgorsky100% (1)
- Maule M7 ChecklistDocument2 pagesMaule M7 ChecklistRameez33No ratings yet
- F-22A Flight Manual 1.0Document94 pagesF-22A Flight Manual 1.0Kirk100% (1)
- Civil Simulator Census 2021: in Association WithDocument19 pagesCivil Simulator Census 2021: in Association WithDavid OwenNo ratings yet
- Principles of Flight ATPL Chapter 13 (High Speed Flight)Document54 pagesPrinciples of Flight ATPL Chapter 13 (High Speed Flight)AŞKIN FIRATNo ratings yet
- Takeoff Speeds - Dry Run: Take Off and Landing SpeedsDocument3 pagesTakeoff Speeds - Dry Run: Take Off and Landing SpeedsFrancisco SoFuentesNo ratings yet
- FULL Download Ebook PDF Introduction To Flight 8th Edition PDF EbookDocument41 pagesFULL Download Ebook PDF Introduction To Flight 8th Edition PDF Ebookdavid.conrad655100% (39)