You might also like
- Engineering Surveying: Theory and Examination Problems for StudentsFrom EverandEngineering Surveying: Theory and Examination Problems for StudentsRating: 4.5 out of 5 stars4.5/5 (24)
- Proportional NavigationDocument5 pagesProportional NavigationD.Viswanath100% (1)
- Introduction To GPS The Global Positioning SystemDocument7 pagesIntroduction To GPS The Global Positioning Systemerika100% (1)
- Three Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorDocument28 pagesThree Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorjusticembamNo ratings yet
- Three Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorDocument28 pagesThree Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorjusticembamNo ratings yet
- Helicopter Firing-Rocket Performance and Pilot S Workload Evaluation From Flight DataDocument6 pagesHelicopter Firing-Rocket Performance and Pilot S Workload Evaluation From Flight DataGustavo Rothmund BolfeNo ratings yet
- LECTURE 6cDocument50 pagesLECTURE 6cChristian Rogel De TorresNo ratings yet
- Mathematical Model To Simulate The Trajectory Elements of An Artillery Projectile Proof ShotDocument10 pagesMathematical Model To Simulate The Trajectory Elements of An Artillery Projectile Proof ShotperryNo ratings yet
- Measurement and Estimation of The Angle of Attack and The Angle of SideslipDocument6 pagesMeasurement and Estimation of The Angle of Attack and The Angle of SideslipzonadosNo ratings yet
- The Whole Trajectory Simulation of Cruise Missile Based On Inertial Navigation Error ModelDocument5 pagesThe Whole Trajectory Simulation of Cruise Missile Based On Inertial Navigation Error ModelBohdan MNo ratings yet
- Missile Guidance Law Design Via Backstepping Technique: Hamza Zaidi, Panlong Wu, Ali BellahceneDocument6 pagesMissile Guidance Law Design Via Backstepping Technique: Hamza Zaidi, Panlong Wu, Ali BellahceneerpublicationNo ratings yet
- Enhancing The Precision of Artillery Rockets Using Pulsejet Control Systems With Active DampingDocument10 pagesEnhancing The Precision of Artillery Rockets Using Pulsejet Control Systems With Active DampingWick JhonNo ratings yet
- Aerodynamic Configuration Design of A Missile IJERTV4IS030060Document4 pagesAerodynamic Configuration Design of A Missile IJERTV4IS030060Gabriel TorrezNo ratings yet
- Terminal Guidance Using A Doppler Beam Sharpening Radar: The Mathworks LTD, Cambridge, UkDocument11 pagesTerminal Guidance Using A Doppler Beam Sharpening Radar: The Mathworks LTD, Cambridge, Ukrabik1234No ratings yet
- Ballistic Missile Maneuver Penetration Based On Reinforcement LearningDocument5 pagesBallistic Missile Maneuver Penetration Based On Reinforcement LearningBriti GangopadhayNo ratings yet
- Simulation of Non-Linear Missile Guidance: P.P.Sudharshan, A.Raja Durai, S.Vertiselvan, K.YaswanthDocument4 pagesSimulation of Non-Linear Missile Guidance: P.P.Sudharshan, A.Raja Durai, S.Vertiselvan, K.YaswanthSudharshan SudharshanNo ratings yet
- Koruba Zbigniew Nocon Lukasz Automatic Control of An Anti TaDocument12 pagesKoruba Zbigniew Nocon Lukasz Automatic Control of An Anti Tascorpion_l_81No ratings yet
- Ast351 3.2.2Document14 pagesAst351 3.2.2rkshwh1978No ratings yet
- Electronic Countermeasure Effectiveness: Evaluation Methods and ToolsDocument10 pagesElectronic Countermeasure Effectiveness: Evaluation Methods and ToolscaranmiroslavNo ratings yet
- APL Basic Principles of Homing Guidance PalumboDocument17 pagesAPL Basic Principles of Homing Guidance PalumboÁlvaro Conti FilhoNo ratings yet
- Zheng 2018 IOP Conf. Ser. Mater. Sci. Eng. 435 012021Document9 pagesZheng 2018 IOP Conf. Ser. Mater. Sci. Eng. 435 012021Jon DoeNo ratings yet
- Proportional Navigation Guidance SystemDocument17 pagesProportional Navigation Guidance SystemD.Viswanath50% (2)
- Ast351 3.2.8Document12 pagesAst351 3.2.8rkshwh1978No ratings yet
- Module 1 & 2 (Tracking Radar) PDFDocument52 pagesModule 1 & 2 (Tracking Radar) PDFDeeksha NaiduNo ratings yet
- Tabu Fuzzy Guidance - 540Document5 pagesTabu Fuzzy Guidance - 540Ubiquitous Computing and Communication JournalNo ratings yet
- Ast351 3.2.7Document10 pagesAst351 3.2.7rkshwh1978No ratings yet
- Stability Analysis of Longitudinal Dynamics of Hovering Flapping Mavs/InsectsDocument20 pagesStability Analysis of Longitudinal Dynamics of Hovering Flapping Mavs/InsectsAhmed ElsadekNo ratings yet
- RLV Terminal Area EnergyDocument5 pagesRLV Terminal Area EnergyShubham KaduNo ratings yet
- Missile Guidance Laws: NITHIN KUMAR. V. P, 4NI13ME081, 7 Semester B' SectionDocument12 pagesMissile Guidance Laws: NITHIN KUMAR. V. P, 4NI13ME081, 7 Semester B' SectionNithin GowdaNo ratings yet
- Calculating Yaw of Repose Spin Drift FULLDocument48 pagesCalculating Yaw of Repose Spin Drift FULLChandan JhaNo ratings yet
- 5 - Navigation Systems-FinalDocument357 pages5 - Navigation Systems-FinalLuiz Fernando T. Vargas100% (1)
- Aerodynamics of Spin Stabilised MissilesDocument23 pagesAerodynamics of Spin Stabilised MissilesAries SattiNo ratings yet
- Flight Dynamics Boomerang AIAA 2019 Final May 2019Document35 pagesFlight Dynamics Boomerang AIAA 2019 Final May 2019Tuncay BERBERNo ratings yet
- Navigation and Guidance: Dr. Shashi Ranjan KumarDocument37 pagesNavigation and Guidance: Dr. Shashi Ranjan KumarNinad KaleNo ratings yet
- Nyongesa 2001Document5 pagesNyongesa 2001jounfrank19No ratings yet
- A New Midcourse Guidance Design For Near Space Target InterceptorDocument10 pagesA New Midcourse Guidance Design For Near Space Target InterceptorgorgiNo ratings yet
- Countermeasures Effectiveness Against Man-Portable Air-Defense System PDFDocument11 pagesCountermeasures Effectiveness Against Man-Portable Air-Defense System PDFFalcao233No ratings yet
- Benchmark: Quadrotor Attitude Control: Epic Series in Computer ScienceDocument16 pagesBenchmark: Quadrotor Attitude Control: Epic Series in Computer ScienceCarlos RomeroNo ratings yet
- Lecture Notes Aircraft Navigation (Lecture 1,2)Document9 pagesLecture Notes Aircraft Navigation (Lecture 1,2)VIRAJ HADKARNo ratings yet
- Navigation and Guidance: Dr. Shashi Ranjan KumarDocument35 pagesNavigation and Guidance: Dr. Shashi Ranjan KumarNinad KaleNo ratings yet
- Aircraft Navigation LNDocument12 pagesAircraft Navigation LNM S PrasadNo ratings yet
- Survey of Orbital Dynamics of Space Rendezvous VehiclesDocument14 pagesSurvey of Orbital Dynamics of Space Rendezvous VehiclesSarfaraz Nawaz ShahaNo ratings yet
- Projectile Motion ProjectDocument17 pagesProjectile Motion Projectrranganath305No ratings yet
- 10.1007@s42405 020 00292 5Document13 pages10.1007@s42405 020 00292 5Mohammed anifNo ratings yet
- Seismic Migration PaperDocument19 pagesSeismic Migration Paperbo.liu.7987No ratings yet
- Exercises 4:: ST T T TDocument4 pagesExercises 4:: ST T T TFranzes Mar EriaNo ratings yet
- Lecture11 PDFDocument12 pagesLecture11 PDFSameer NarsapurNo ratings yet
- Missile AerodynamicsDocument37 pagesMissile AerodynamicsSerge100% (1)
- LOS Rate Estimation Techniques For Proportional Navigation Guided MissilesDocument6 pagesLOS Rate Estimation Techniques For Proportional Navigation Guided MissilesDpt HtegnNo ratings yet
- Ast351 3.2.4Document13 pagesAst351 3.2.4rkshwh1978No ratings yet
- Three-Dimensional Missile Guidance Laws Design Using Fuzzy SchemesDocument8 pagesThree-Dimensional Missile Guidance Laws Design Using Fuzzy Schemesاحمد عليNo ratings yet
- Flight Control System For Guided Rolling-AirframeDocument10 pagesFlight Control System For Guided Rolling-AirframeMarcos Paulo Aragão SantosNo ratings yet
- Numerical Investigations On Wedge Control of Separation of A Missile From An AircraftDocument6 pagesNumerical Investigations On Wedge Control of Separation of A Missile From An AircraftMonitering EyeNo ratings yet
- 1377-Текст статті-2478-1-10-20231008Document9 pages1377-Текст статті-2478-1-10-20231008Го КейсNo ratings yet
- Fully Automatic Taxiing, Takeoff and Landing of A UAV Based On A Single-Antenna GNSS ReceiverDocument6 pagesFully Automatic Taxiing, Takeoff and Landing of A UAV Based On A Single-Antenna GNSS Receiverbang nguyen dinhNo ratings yet
- Proportional Navigation Based On Tactical MSL Guidance by ZarchanDocument23 pagesProportional Navigation Based On Tactical MSL Guidance by ZarchanD.Viswanath100% (3)
- Please Note That Cypress Is An Infineon Technologies CompanyDocument16 pagesPlease Note That Cypress Is An Infineon Technologies CompanymhasansharifiNo ratings yet
- Malla Reddy Engineering College (Autonomous)Document17 pagesMalla Reddy Engineering College (Autonomous)Ranjith KumarNo ratings yet
- Uav Collision Avoidance Via Optimal Trajectory Generation MethodDocument7 pagesUav Collision Avoidance Via Optimal Trajectory Generation MethodMuhammad FarhanNo ratings yet
- Angular Orientation of Anti-Aircraft Gun For Interception of A Moving Air TargetDocument12 pagesAngular Orientation of Anti-Aircraft Gun For Interception of A Moving Air TargetRobiteaNo ratings yet
- Missile Guidance PDFDocument22 pagesMissile Guidance PDFjamesyblee50% (2)
- Flight Test Instrumentation: Proceedings of the Third International Symposium 1964From EverandFlight Test Instrumentation: Proceedings of the Third International Symposium 1964M. A. PerryNo ratings yet
- Missile Interceptor Guidance and ControlDocument6 pagesMissile Interceptor Guidance and ControlDpt HtegnNo ratings yet
- IRJET Modeling and Analysis of Inter Cop-68914792Document5 pagesIRJET Modeling and Analysis of Inter Cop-68914792Dpt HtegnNo ratings yet
- Optimal Approach Autopilot TopologiesDocument30 pagesOptimal Approach Autopilot TopologiesDpt HtegnNo ratings yet
- GNC All NPTELDocument140 pagesGNC All NPTELDpt HtegnNo ratings yet
- IJERT Design of Lateral Acceleration ConDocument11 pagesIJERT Design of Lateral Acceleration ConDpt HtegnNo ratings yet
- Three Plane Approach For 3D True Proportional NavigationDocument26 pagesThree Plane Approach For 3D True Proportional NavigationDpt HtegnNo ratings yet
- Sensitivity Analysis and Flight Tests ReDocument40 pagesSensitivity Analysis and Flight Tests ReDpt HtegnNo ratings yet
- Navigation SYSDocument25 pagesNavigation SYSDpt HtegnNo ratings yet
- Simulink Missile Control SystemDocument6 pagesSimulink Missile Control SystemDpt HtegnNo ratings yet
- ICCA2010-SDRE FinalDocument5 pagesICCA2010-SDRE FinalDpt HtegnNo ratings yet
- Ship Borne RFTracking SystemDocument11 pagesShip Borne RFTracking SystemDpt HtegnNo ratings yet
- Display HMDDocument55 pagesDisplay HMDDpt HtegnNo ratings yet
- MillingDocument81 pagesMillingDpt HtegnNo ratings yet
- HPDM-250 Datasheet v1.7Document1 pageHPDM-250 Datasheet v1.7Dpt HtegnNo ratings yet
- L21-L24 - DepreciationDocument21 pagesL21-L24 - DepreciationDpt HtegnNo ratings yet
- A Study of The Internal Aerodynamics of The Concorde Inlet: John W. SlaterDocument17 pagesA Study of The Internal Aerodynamics of The Concorde Inlet: John W. SlaterDpt HtegnNo ratings yet
- L25-28 Costs - and - Breakeven - SlidesDocument20 pagesL25-28 Costs - and - Breakeven - SlidesDpt HtegnNo ratings yet
- Operational and Technological DirectionsDocument18 pagesOperational and Technological DirectionsDpt HtegnNo ratings yet
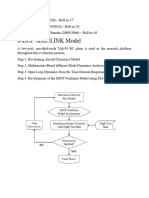
- 6DOF - ANN - Roll No 17,20,36Document8 pages6DOF - ANN - Roll No 17,20,36Dpt HtegnNo ratings yet
- Efficient Computation of The DFT: Fast Fourier Transform AlgorithmsDocument40 pagesEfficient Computation of The DFT: Fast Fourier Transform AlgorithmsDpt HtegnNo ratings yet
- Powder MetallurgyDocument56 pagesPowder MetallurgyDpt HtegnNo ratings yet
- Powder Metallurgy& Heat Treatment of Steel Final PresentationDocument85 pagesPowder Metallurgy& Heat Treatment of Steel Final PresentationDpt HtegnNo ratings yet
- Dept. of Aero & Auto, M.I.T, ManipalDocument138 pagesDept. of Aero & Auto, M.I.T, ManipalDpt HtegnNo ratings yet
- AAE 3104 CH 11 Mission Performance - Level Acceleration and Climb SegmentsDocument18 pagesAAE 3104 CH 11 Mission Performance - Level Acceleration and Climb SegmentsDpt HtegnNo ratings yet
- New Doc 2019-08-24Document7 pagesNew Doc 2019-08-24Dpt HtegnNo ratings yet
- Partial Derivatives QuestionsDocument20 pagesPartial Derivatives QuestionsDpt HtegnNo ratings yet
- PDE Notes (10pages)Document10 pagesPDE Notes (10pages)Dpt HtegnNo ratings yet
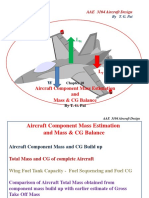
- AAE 3104 CH 10 Aircraft Component Mass Estimation and Mass & CG BalanceDocument44 pagesAAE 3104 CH 10 Aircraft Component Mass Estimation and Mass & CG BalanceDpt HtegnNo ratings yet
- Department of Mathematics Manipal Institute of Technology, ManipalDocument5 pagesDepartment of Mathematics Manipal Institute of Technology, ManipalDpt HtegnNo ratings yet
- Wave EquationDocument8 pagesWave EquationDpt HtegnNo ratings yet
- Advanced Topics: (Iii) Global Positioning System (GPS)Document20 pagesAdvanced Topics: (Iii) Global Positioning System (GPS)RamanarayanSankritiNo ratings yet
- Guided Missiles - DRDODocument90 pagesGuided Missiles - DRDODevanand T Santha0% (1)
- Contour Map of Pt. Aljabri Buana CitraDocument1 pageContour Map of Pt. Aljabri Buana CitraSatria BudiNo ratings yet
- DCS SAM Guide - V1.0Document89 pagesDCS SAM Guide - V1.0Zsolt SzivákNo ratings yet
- Air ArmamentDocument29 pagesAir ArmamentAmit Kumar100% (2)
- Pechora 2TMDocument6 pagesPechora 2TMTa MereNo ratings yet
- Air-Launched Guided Missiles and Its LaunchersDocument19 pagesAir-Launched Guided Missiles and Its LaunchersDIPAK VINAYAK SHIRBHATE100% (1)
- DGPSDocument2 pagesDGPSKallol DasNo ratings yet
- Flight Control System For Guided Rolling-AirframeDocument10 pagesFlight Control System For Guided Rolling-AirframeMarcos Paulo Aragão SantosNo ratings yet
- Satellite-Based Augmentation Systems (SBAS) Combined PerformanceDocument17 pagesSatellite-Based Augmentation Systems (SBAS) Combined PerformanceSergioNo ratings yet
- WWW - Radartutorial.eu - Rp08.EnDocument2 pagesWWW - Radartutorial.eu - Rp08.EnShubhendu PandeyNo ratings yet
- Ew VietnamDocument209 pagesEw VietnamJavier Gonzalez100% (1)
- Module 4 PDFDocument28 pagesModule 4 PDFDeeksha NaiduNo ratings yet
- Ins ArihantDocument38 pagesIns ArihantHasanul BannaNo ratings yet
- Le07 L1TP 121065 20161021 20161116 01 T1 MTLDocument5 pagesLe07 L1TP 121065 20161021 20161116 01 T1 MTLHani Yusrina SafuraNo ratings yet
- The Development of Radar Homing Missiles: Raytheon Company, Bedford, MassachusettsDocument11 pagesThe Development of Radar Homing Missiles: Raytheon Company, Bedford, Massachusettsketab_doostNo ratings yet
- Chapter 15 Guidance and ControlDocument13 pagesChapter 15 Guidance and Controlramu497No ratings yet
- Sarkar Presentation 01Document84 pagesSarkar Presentation 01Achintya SarkarNo ratings yet
- Hof 20Document70 pagesHof 20Lavern SipinNo ratings yet
- A095118 PDFDocument321 pagesA095118 PDFLuiz PeixotoNo ratings yet
- Baseline Summary ReportDocument53 pagesBaseline Summary ReportYura RachmaNo ratings yet
- SA-4B GanefDocument49 pagesSA-4B GanefTamas VarhegyiNo ratings yet
- Adaptive Missile Guidance SystemDocument24 pagesAdaptive Missile Guidance SystemSudhanshu SrivastavaNo ratings yet
- Estadística Aplicada A La Geoquímica PDFDocument44 pagesEstadística Aplicada A La Geoquímica PDFAngel Cubas RiveraNo ratings yet
- USA Airports Apr 08Document125 pagesUSA Airports Apr 08brents319No ratings yet
- FAUCETTDocument369 pagesFAUCETTJuan-Carlos Roldan LoayzaNo ratings yet
- Dgps Survey For BWDBDocument34 pagesDgps Survey For BWDBShafiqul HasanNo ratings yet
- The NMEA 0183 ProtocolDocument13 pagesThe NMEA 0183 ProtocolredvalorNo ratings yet