You might also like
- BQ3123 SOP16 315/433MHZ Low Power Receiver Application NoteDocument19 pagesBQ3123 SOP16 315/433MHZ Low Power Receiver Application NoteAlexander Wernhart100% (1)
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- ASTM D7136 Low Velocity ImpactDocument16 pagesASTM D7136 Low Velocity Impacttommasobrugo100% (1)
- Facts at Your FingertipsDocument41 pagesFacts at Your FingertipsOMID464100% (1)
- 41200cmanual MacrochipDocument36 pages41200cmanual MacrochipDarilho Batista Ignacio100% (1)
- Practical Feedback Loop Design Considerations For Flyback Converter Using UCC28740Document7 pagesPractical Feedback Loop Design Considerations For Flyback Converter Using UCC28740jay lowkeyNo ratings yet
- ICL88xx Flyback Design Guide: DG - 2103 - PL39 - 2104 - 160011Document64 pagesICL88xx Flyback Design Guide: DG - 2103 - PL39 - 2104 - 160011Michael WeirichNo ratings yet
- 3A, 23V, 340Khz Synchronous Step-Down Converter: General Description FeaturesDocument12 pages3A, 23V, 340Khz Synchronous Step-Down Converter: General Description FeaturesAbdul MuhidNo ratings yet
- X-10 Data-Stream MonitorDocument4 pagesX-10 Data-Stream MonitorGustavo PiaiNo ratings yet
- Half Bridge Driver With IR2153 IGBT PDFDocument4 pagesHalf Bridge Driver With IR2153 IGBT PDFShibu Kumar SNo ratings yet
- Isolated DC-DC ConverterDocument4 pagesIsolated DC-DC ConverterUge AjjaNo ratings yet
- Datasheet PDFDocument6 pagesDatasheet PDFMichael DavenportNo ratings yet
- Ebc Mn63y1210a En-773623Document9 pagesEbc Mn63y1210a En-773623Jose Elias RangelNo ratings yet
- 3A, 23V, 340Khz Synchronous Step-Down Converter: General Description FeaturesDocument12 pages3A, 23V, 340Khz Synchronous Step-Down Converter: General Description FeaturesJuan Carlos SrafanNo ratings yet
- SSC3S921 Data Sheet: LLC Current-Resonant Off-Line Switching ControllerDocument28 pagesSSC3S921 Data Sheet: LLC Current-Resonant Off-Line Switching ControllerytnateNo ratings yet
- Bd83a04efv M eDocument49 pagesBd83a04efv M e1 Cutting Edge TechnologyNo ratings yet
- ICB1FL02G: Smart Ballast Control IC For Fluorescent Lamp BallastsDocument37 pagesICB1FL02G: Smart Ballast Control IC For Fluorescent Lamp BallastsshounakroyNo ratings yet
- Diseño output ripple en DCDCDocument10 pagesDiseño output ripple en DCDCherraezjorge8No ratings yet
- Lm2622 600Khz/1.3Mhz Step-Up PWM DC/DC Converter: Features DescriptionDocument27 pagesLm2622 600Khz/1.3Mhz Step-Up PWM DC/DC Converter: Features Description최창민No ratings yet
- Power Management & Supply: Datasheet, Version 2.0, 04 July 2011Document19 pagesPower Management & Supply: Datasheet, Version 2.0, 04 July 2011Eletrohelp EletrodomésticosNo ratings yet
- High Current MOSFET Driver: FeaturesDocument16 pagesHigh Current MOSFET Driver: FeaturesmilivojNo ratings yet
- Halogen 12vDocument17 pagesHalogen 12veryNo ratings yet
- Infineon TLE4988C - CamshaftSensor - DS DataSheet v01 - 00 ENDocument13 pagesInfineon TLE4988C - CamshaftSensor - DS DataSheet v01 - 00 ENAhmad AzharNo ratings yet
- A Direct Digital Synthesis VFO For HF Bands: The Project in Few WordsDocument9 pagesA Direct Digital Synthesis VFO For HF Bands: The Project in Few WordsRafael SuarezNo ratings yet
- SSC3S910 Data Sheet: LLC Current-Resonant Off-Line Switching ControllerDocument31 pagesSSC3S910 Data Sheet: LLC Current-Resonant Off-Line Switching ControllerytnateNo ratings yet
- Tesys Contactors For Switching 3 Phase Capacitor Banks PDFDocument2 pagesTesys Contactors For Switching 3 Phase Capacitor Banks PDFNisar AhmedNo ratings yet
- High-Voltage Signal Conditioning For Low-Voltage Adcs: Application ReportDocument11 pagesHigh-Voltage Signal Conditioning For Low-Voltage Adcs: Application ReportOSCAR ANDRES BERMUDEZ HERNANDEZNo ratings yet
- Circuit Generates High-Frequency Sine/Cosine Waves From Square-Wave InputDocument8 pagesCircuit Generates High-Frequency Sine/Cosine Waves From Square-Wave InputCARLOSNo ratings yet
- 6R160P6 InfineonDocument19 pages6R160P6 InfineonJlavieraNo ratings yet
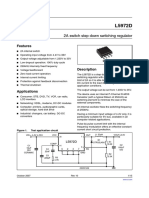
- 2A Switch Step Down Switching Regulator: FeaturesDocument15 pages2A Switch Step Down Switching Regulator: FeaturesOrlando HernandezNo ratings yet
- MDT10P57 Microcontroller Features Low Power CMOS DesignDocument13 pagesMDT10P57 Microcontroller Features Low Power CMOS DesignJuan Carlos Ramírez LeónNo ratings yet
- LM5022Document41 pagesLM5022email emailNo ratings yet
- Comparative Analysis of Two Different Methods For Gate-Drive Current BoostingDocument9 pagesComparative Analysis of Two Different Methods For Gate-Drive Current BoostingHamza SohailNo ratings yet
- DSAEDA000142090Document19 pagesDSAEDA000142090dangthanhlinhNo ratings yet
- High Side Current Sense CircuitDocument6 pagesHigh Side Current Sense Circuitabhay pandeyNo ratings yet
- Infineon-Design Guide LLC Converter ICE2HS01G-An-V01 00-EnDocument26 pagesInfineon-Design Guide LLC Converter ICE2HS01G-An-V01 00-EnAhmed AlagmyNo ratings yet
- Infineon-Design Guide Boost Type CCM PFC ICE3PCSxx-AN-v02 00-EN PDFDocument26 pagesInfineon-Design Guide Boost Type CCM PFC ICE3PCSxx-AN-v02 00-EN PDFThai Anh NguyenNo ratings yet
- PLCC-28: NC AIN3-O2V Ain4-Rpm TXPWMDocument8 pagesPLCC-28: NC AIN3-O2V Ain4-Rpm TXPWM肖磊No ratings yet
- RT8015 2A 2MHz Synchronous Step-Down RegulatorDocument15 pagesRT8015 2A 2MHz Synchronous Step-Down RegulatorPedrolaura BethencourtNo ratings yet
- CN0193 PDFDocument3 pagesCN0193 PDFSanthosh Kumar H ONo ratings yet
- 1707S uPISemiconductorDocument13 pages1707S uPISemiconductordulah kemprohNo ratings yet
- CTK-500 Electronic Keyboard Specs & DiagramsDocument21 pagesCTK-500 Electronic Keyboard Specs & DiagramsdarwinNo ratings yet
- Infineon IPZ60R125P6 DS v02 - 00 ENDocument15 pagesInfineon IPZ60R125P6 DS v02 - 00 ENJose Maria PerezNo ratings yet
- An 6100 PDFDocument16 pagesAn 6100 PDFjjoaquimmartinsNo ratings yet
- 1 - 8 / 2 - 5 / 3 - 3 V L - J, L - S C B / L T: OW Itter OW KEW Lock Uffer Evel RanslatorDocument20 pages1 - 8 / 2 - 5 / 3 - 3 V L - J, L - S C B / L T: OW Itter OW KEW Lock Uffer Evel RanslatorharshalvikasNo ratings yet
- Tunable White LED Drivers With BCR601 and BCR602: AN - 2007 - PL39 - 2009 - 125229Document32 pagesTunable White LED Drivers With BCR601 and BCR602: AN - 2007 - PL39 - 2009 - 125229Avs ElectronNo ratings yet
- General Description Features: 380Khz, 18V/2A Synchronous Step-Down DC-DC ConverterDocument19 pagesGeneral Description Features: 380Khz, 18V/2A Synchronous Step-Down DC-DC Converteroscar1162001No ratings yet
- FR9886Document12 pagesFR9886abrkNo ratings yet
- Gate Driver L6385EDocument16 pagesGate Driver L6385EĆazim SinanagićNo ratings yet
- Isolated Continuous Conduction Mode Flyback Using The TPS55340Document16 pagesIsolated Continuous Conduction Mode Flyback Using The TPS55340pietisc pietiscNo ratings yet
- SSC3S931 Data Sheet: LLC Current-Resonant Off-Line Switching ControllerDocument23 pagesSSC3S931 Data Sheet: LLC Current-Resonant Off-Line Switching ControllerytnateNo ratings yet
- MIP521A Application Note - Ver.2-5Document16 pagesMIP521A Application Note - Ver.2-5draNo ratings yet
- LDC0851EVM: User's GuideDocument20 pagesLDC0851EVM: User's GuideAndresNo ratings yet
- Features: PLCC-28Document15 pagesFeatures: PLCC-28肖磊No ratings yet
- Si 570Document36 pagesSi 570Star LiNo ratings yet
- Alto A500.2 Power Amp Service Manual PDFDocument22 pagesAlto A500.2 Power Amp Service Manual PDFmundomusicalmeriaNo ratings yet
- Transition-Mode PFC Controller: FeaturesDocument25 pagesTransition-Mode PFC Controller: FeaturesRodrigo BonfanteNo ratings yet
- PLCC-28: Txcan MIL NC AN3-O2VDocument8 pagesPLCC-28: Txcan MIL NC AN3-O2V肖磊No ratings yet
- Surge Stopping and Reverse Voltage Protection With The LM5069 PDFDocument7 pagesSurge Stopping and Reverse Voltage Protection With The LM5069 PDFĐỗ Văn ThủyNo ratings yet
- Design Challenges of Switching LED DriversDocument7 pagesDesign Challenges of Switching LED DriversArvish RamseebaluckNo ratings yet
- Ebara Dry Vacuum Pump O&M ManualDocument69 pagesEbara Dry Vacuum Pump O&M ManualArvish RamseebaluckNo ratings yet
- HTM 2025 2 (New) Ventilation in HospitalsDocument123 pagesHTM 2025 2 (New) Ventilation in HospitalsArvish RamseebaluckNo ratings yet
- Adopting Internet of Things For The Development of Smart Buildings A Review of Enabling Technologies and Applications 2019 PDFDocument16 pagesAdopting Internet of Things For The Development of Smart Buildings A Review of Enabling Technologies and Applications 2019 PDFSubhanullah OmarkhilNo ratings yet
- HTM 03-01 Specialised Ventilation For Health Care PremisesDocument134 pagesHTM 03-01 Specialised Ventilation For Health Care PremisesArvish RamseebaluckNo ratings yet
- Good For Inductor Selection and Output Capacitor SelectionDocument6 pagesGood For Inductor Selection and Output Capacitor SelectionXin LuNo ratings yet
- MBR0540T1G, NRVB0540T1G, MBR0540T3G, NRVB0540T3G Surface Mount Schottky Power RectifierDocument5 pagesMBR0540T1G, NRVB0540T1G, MBR0540T3G, NRVB0540T3G Surface Mount Schottky Power Rectifierdaniel5morales5castaNo ratings yet
- Vibration Analysis and Diagnostic GuideDocument66 pagesVibration Analysis and Diagnostic Guidejunhyol100% (2)
- HTM 64 3rded2006Document64 pagesHTM 64 3rded2006fisplNo ratings yet
- Firecode Fire Safety in The NHS Health Technical Memorandum 05-03 Operational Provisions PDFDocument30 pagesFirecode Fire Safety in The NHS Health Technical Memorandum 05-03 Operational Provisions PDFzamriNo ratings yet
- HTM 2022-2Document96 pagesHTM 2022-2Arvish RamseebaluckNo ratings yet
- BEGA-24409 DB enDocument1 pageBEGA-24409 DB enArvish RamseebaluckNo ratings yet
- HTM 06-01 Electrical ServicesDocument153 pagesHTM 06-01 Electrical ServicesArvish RamseebaluckNo ratings yet
- BEGA-24409 DB enDocument1 pageBEGA-24409 DB enArvish RamseebaluckNo ratings yet
- Product Data Sheet: Ceiling and Wall Luminaire IP 65Document1 pageProduct Data Sheet: Ceiling and Wall Luminaire IP 65Arvish RamseebaluckNo ratings yet
- Bega SpecDocument1 pageBega SpecArvish RamseebaluckNo ratings yet
- 2016 Book PracticalElectricalEngineering PDFDocument999 pages2016 Book PracticalElectricalEngineering PDFGino Laurella100% (1)
- AE EEE2039 Lecture4-DiodesDocument30 pagesAE EEE2039 Lecture4-DiodesArvish RamseebaluckNo ratings yet
- Philips Uv Purification Lamps and Gear CatalogDocument32 pagesPhilips Uv Purification Lamps and Gear CatalogDarwin Uriel Bayona AlverniaNo ratings yet
- Bega SpecDocument1 pageBega SpecArvish RamseebaluckNo ratings yet
- Product Data Sheet: Ceiling and Wall Luminaire IP 65Document1 pageProduct Data Sheet: Ceiling and Wall Luminaire IP 65Arvish RamseebaluckNo ratings yet
- Analogue Electronic Design Module E EEE2039 / EEE2026 / EEE2042Document36 pagesAnalogue Electronic Design Module E EEE2039 / EEE2026 / EEE2042Arvish RamseebaluckNo ratings yet
- Analogue Electronic Design Module E - Diode V-I CharacteristicsDocument50 pagesAnalogue Electronic Design Module E - Diode V-I CharacteristicsArvish RamseebaluckNo ratings yet
- Samsung Installation ManualDocument2 pagesSamsung Installation ManualArvish RamseebaluckNo ratings yet
- Reading Practice2 IELTSDocument16 pagesReading Practice2 IELTSCraciun Andreea100% (3)
- B Eco IndicatorDocument15 pagesB Eco IndicatorArvish RamseebaluckNo ratings yet
- COVID-19 Ultraviolet LightDocument5 pagesCOVID-19 Ultraviolet LightRoberto Carlos Tapía de LéonNo ratings yet
- Perfection Preser Ved: UV Disinfection - Application InformationDocument44 pagesPerfection Preser Ved: UV Disinfection - Application InformationArvish RamseebaluckNo ratings yet
- Industrial EcologyDocument49 pagesIndustrial EcologyArvish RamseebaluckNo ratings yet
- Stabilized Earth Fault Current Relay Settings GuideDocument20 pagesStabilized Earth Fault Current Relay Settings GuideRaj KrishNo ratings yet
- Manual JD English c13960Document53 pagesManual JD English c13960Ardhana ArdhanaNo ratings yet
- Manufacturing Facilities Design and Material HandelingDocument7 pagesManufacturing Facilities Design and Material Handelingabdelghani cherkaouiNo ratings yet
- Super Gas - LPG MsdsDocument2 pagesSuper Gas - LPG Msdskadalir50% (4)
- Physical Quantum MechanicsDocument33 pagesPhysical Quantum MechanicsJerome ColicoNo ratings yet
- Types of Welding ProcessesDocument7 pagesTypes of Welding Processesrohitme045No ratings yet
- BW213DH-4, BW213PDH-4: Single Drum Vibratory RollerDocument4 pagesBW213DH-4, BW213PDH-4: Single Drum Vibratory RollerAnh NguyenNo ratings yet
- Isuzu Cars and Trucks 1981Document9 pagesIsuzu Cars and Trucks 1981MultharizalKhidayatNo ratings yet
- Copper CapabilitiesDocument9 pagesCopper CapabilitiesAliya SerikbolNo ratings yet
- IAL-Physics Unit 3 (WPH13-01) (2020-01-10) Q+ADocument32 pagesIAL-Physics Unit 3 (WPH13-01) (2020-01-10) Q+AUClan Plant & MaintenanceNo ratings yet
- 5 Subsea ArchitectureDocument39 pages5 Subsea Architectureahmezo100% (1)
- Approximate Diesel Fuel Consumption Chart: Download Chart To PDFDocument1 pageApproximate Diesel Fuel Consumption Chart: Download Chart To PDFTaufik Raharjo100% (1)
- Special Purpose Motors - Large FontsDocument26 pagesSpecial Purpose Motors - Large FontsAnuradha SkaNo ratings yet
- Diesel Quality Certificate for MT TORM GUNHILDDocument1 pageDiesel Quality Certificate for MT TORM GUNHILDMarcones SáNo ratings yet
- Ex9BH DisjunctoriDocument11 pagesEx9BH DisjunctoriTiberiuBabetNo ratings yet
- NSE-20230411-thewealthvriksh.comDocument44 pagesNSE-20230411-thewealthvriksh.comdhawansandeepNo ratings yet
- Group3 A6-1Document111 pagesGroup3 A6-1JulietteNo ratings yet
- HXE Water Cooled Magnetic Bearing Centrifugal ChillerDocument16 pagesHXE Water Cooled Magnetic Bearing Centrifugal ChillerĐặng Xuân ViệtNo ratings yet
- Aiema News Aprmay2013Document56 pagesAiema News Aprmay2013venkatesh_1829No ratings yet
- Modulating Liquid Level Regulators, Direct-Controlled SV 1 and SV 3Document8 pagesModulating Liquid Level Regulators, Direct-Controlled SV 1 and SV 3carlos50No ratings yet
- Conformation and Crystal Structure:, in Either AmorDocument34 pagesConformation and Crystal Structure:, in Either AmorUsama AwadNo ratings yet
- Product DatasheetDocument1 pageProduct Datasheetnebojsa bohorNo ratings yet
- Project On Earth Infrastructure PVT LTDDocument66 pagesProject On Earth Infrastructure PVT LTDAbhineet SinghNo ratings yet
- Ethanol Guidebook For DesignDocument67 pagesEthanol Guidebook For DesignSRINIVASAN TNo ratings yet
- Smart Management SystemDocument10 pagesSmart Management Systemishantbharadwaj12No ratings yet
- Theotoglou Main PDFDocument8 pagesTheotoglou Main PDFHako KhechaiNo ratings yet
- Comparison of The Series and Parallel ArchitecturesDocument6 pagesComparison of The Series and Parallel ArchitecturesAdriano BludegardNo ratings yet
- 1.sumitomo Basiics of Hydraulics PDFDocument207 pages1.sumitomo Basiics of Hydraulics PDFsurianto100% (2)