You might also like
- SyntecDocument38 pagesSyntecReza Guntur BudiyantoNo ratings yet
- Spc 02單軸運動控制 手冊Document7 pagesSpc 02單軸運動控制 手冊johnNo ratings yet
- DMS-055A说明书v1 0Document28 pagesDMS-055A说明书v1 0許駿瑋No ratings yet
- 华中系统参数表Document6 pages华中系统参数表gusheng860No ratings yet
- FK3U 24MT 6AI2AO使用手册Document12 pagesFK3U 24MT 6AI2AO使用手册Nguyễn Đăng Đức100% (1)
- HBS86HDocument8 pagesHBS86HRudy TorrezNo ratings yet
- 320B监控器控制系统Document8 pages320B监控器控制系统chunping songNo ratings yet
- JY01 BLDC Driver Chip PDFDocument12 pagesJY01 BLDC Driver Chip PDFAngelo CasimiroNo ratings yet
- Bldc 专用 Ic 直流无刷电机控制 ICDocument12 pagesBldc 专用 Ic 直流无刷电机控制 ICALEXNo ratings yet
- Technical Manual For Special Servo of Chiser 02.0.05Document33 pagesTechnical Manual For Special Servo of Chiser 02.0.05mandegar companyNo ratings yet
- DM J4310 2EC减速电机说明书V1.0Document9 pagesDM J4310 2EC减速电机说明书V1.0wangbo2750No ratings yet
- Hbs860h ChineseDocument4 pagesHbs860h ChineseJesus Mac LoNo ratings yet
- Hbs860h Chinese Data SheetDocument4 pagesHbs860h Chinese Data SheetOscar TerrerosNo ratings yet
- HC 08Document16 pagesHC 08gaubuproNo ratings yet
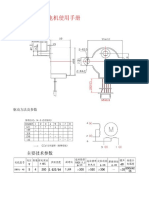
- 24BYJ48 步进电机使用手册Document7 pages24BYJ48 步进电机使用手册cqlNo ratings yet
- 重庆铭贝科技有限公司 地址:重庆市江北区港安二路 2 号 4 幢 6-2 电话:+86-23-6869 3061 传真:+86-23-6765 8207 全国免长途电话:400-611-7011 网址:http://www.mebay.cn E - mail:sales@mebay.cnDocument27 pages重庆铭贝科技有限公司 地址:重庆市江北区港安二路 2 号 4 幢 6-2 电话:+86-23-6869 3061 传真:+86-23-6765 8207 全国免长途电话:400-611-7011 网址:http://www.mebay.cn E - mail:sales@mebay.cnSaud DareNo ratings yet
- GY 955V2手册Document6 pagesGY 955V2手册ramiresSNo ratings yet
- DAM-3523 H产品使用手册 (V6.01.01)Document19 pagesDAM-3523 H产品使用手册 (V6.01.01)AliNo ratings yet
- 普锐森社倾角传感器(485型)Document11 pages普锐森社倾角传感器(485型)Guan Zhi YongNo ratings yet
- Keil C51chbookDocument184 pagesKeil C51chbookapi-3747669100% (2)
- CiA402伺服使用说明Document20 pagesCiA402伺服使用说明MyKsNo ratings yet
- WCH Jiangsu Qin Heng CH423S - C111663Document9 pagesWCH Jiangsu Qin Heng CH423S - C111663Marcos AquinoNo ratings yet
- MODBUS RTU - 3phase - V102Document47 pagesMODBUS RTU - 3phase - V102BoNo ratings yet
- Zn48 Timer ChinoDocument7 pagesZn48 Timer ChinoLuis Alberto RiosNo ratings yet
- Ard CDocument3 pagesArd Cxuliankai0628No ratings yet
- 弧压调高器 FY007型说明书(中文更新)Document18 pages弧压调高器 FY007型说明书(中文更新)wnegroncNo ratings yet
- 普锐森社铝壳风速变送器(485型)Document10 pages普锐森社铝壳风速变送器(485型)Nugroho Widi JatmikoNo ratings yet
- 上海航士海洋科技有限公司FLAGSHIP 19型光纤陀螺罗经使用维护说明书Document16 pages上海航士海洋科技有限公司FLAGSHIP 19型光纤陀螺罗经使用维护说明书ziying tangNo ratings yet
- 170方向盘舵机使用手册-标准(V1 3)Document26 pages170方向盘舵机使用手册-标准(V1 3)Jose Vilc.No ratings yet
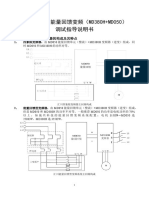
- 660V防爆能量回馈变频 (MD050 250+MD380H 355) 调试指导说明书Document11 pages660V防爆能量回馈变频 (MD050 250+MD380H 355) 调试指导说明书jiangang wuNo ratings yet
- S7-200 伺服馬達速度追隨變頻馬達 - v0Document12 pagesS7-200 伺服馬達速度追隨變頻馬達 - v0Bob0526100% (2)
- DLT645 - 1997 Communication ProtocolDocument36 pagesDLT645 - 1997 Communication Protocolmcmax911No ratings yet
- cp系列 功能块使用指南 直线插补Document18 pagescp系列 功能块使用指南 直线插补ans5765No ratings yet
- XES-07W 励磁智能控制器 (无刷)Document27 pagesXES-07W 励磁智能控制器 (无刷)Son Ng DangNo ratings yet
- GT811Document20 pagesGT811moyiduo2024No ratings yet
- 4&5轴DD电机调试Document9 pages4&5轴DD电机调试charlechenNo ratings yet
- 4&5轴DD电机调试Document9 pages4&5轴DD电机调试charlechenNo ratings yet
- 激光测距模块规格书Document16 pages激光测距模块规格书cliffyao45No ratings yet
- AN00204-Generic Drive Interface Rev S CNDocument28 pagesAN00204-Generic Drive Interface Rev S CN黄微No ratings yet
- DS NVEM CH-新Document31 pagesDS NVEM CH-新abelmil123No ratings yet
- HBS57Document8 pagesHBS57Thế NhânNo ratings yet
- SM1623B EtcDocument15 pagesSM1623B EtcJhon AntaNo ratings yet
- Jack JK T1900 Bar Tack ManualDocument55 pagesJack JK T1900 Bar Tack ManualLeon UnderhayNo ratings yet
- XMJA 8000流量积算仪使用说明书 PDFDocument20 pagesXMJA 8000流量积算仪使用说明书 PDFRoy Naldo NapitupuluNo ratings yet
- Inverter Yaskawa H1000Document71 pagesInverter Yaskawa H1000Dedy100% (1)
- 軟起動Document60 pages軟起動方包No ratings yet
- Promet 410-VDocument37 pagesPromet 410-Vijen huangNo ratings yet
- 20120523151656DSSD332 DTSD342-1B型电压电流表使用说明书 - 硬件:开关电源1V1.0三行液晶120312 -Document26 pages20120523151656DSSD332 DTSD342-1B型电压电流表使用说明书 - 硬件:开关电源1V1.0三行液晶120312 -muhammad nazirNo ratings yet
- PLC工 WS2N-10MR-Z V1.3Document16 pagesPLC工 WS2N-10MR-Z V1.3splinter inc50% (2)
- Mx0816ehs, Mx0817ehs, MX0816THSDocument9 pagesMx0816ehs, Mx0817ehs, MX0816THSEsteban MejiaNo ratings yet
- Mach3中文说明书第二版Document25 pagesMach3中文说明书第二版Jackam kamNo ratings yet
- ZDBX-36R ManualDocument23 pagesZDBX-36R ManualIrem BayramogluNo ratings yet
- 2030050883威盟士模拟量转485模块Document9 pages2030050883威盟士模拟量转485模块haifeng rongNo ratings yet
- T230-v2.6 设备交付培训Document33 pagesT230-v2.6 设备交付培训Damir HernandezNo ratings yet
- XK3101(shark-ieb)型 称重显示控制器Document15 pagesXK3101(shark-ieb)型 称重显示控制器Alec Hernandez GomezNo ratings yet
- 2-16位微处理器Intel 8086Document55 pages2-16位微处理器Intel 8086limengdi0269No ratings yet
- NVCM Manual (CN)Document30 pagesNVCM Manual (CN)Vamesu GabiNo ratings yet
- 28071Document97 pages28071labrosse.maintenanceNo ratings yet
- RNR全能型USB运动控制卡使用说明书Document43 pagesRNR全能型USB运动控制卡使用说明书الكترونيات يافاNo ratings yet
- 电池管理系统BMS厂家及产品Document120 pages电池管理系统BMS厂家及产品Guoliang ZhangNo ratings yet
- Brochure Motor ControlDocument76 pagesBrochure Motor ControlMostapha AguerrabNo ratings yet
- 毕业论文 (设计) 无刷直流电动机控制系统设Document57 pages毕业论文 (设计) 无刷直流电动机控制系统设davidwang8512No ratings yet
- 115 230DR10AL 01 ChinoDocument20 pages115 230DR10AL 01 ChinoAngel RosasNo ratings yet
- Faradyi 200W-10KW DC Servo Motor and Controller-C - WatermarkDocument40 pagesFaradyi 200W-10KW DC Servo Motor and Controller-C - WatermarkM. Sharjeel FarzadNo ratings yet
- KMD同步控制器系列说明书Document35 pagesKMD同步控制器系列说明书Vanderson De Andrade SantosNo ratings yet
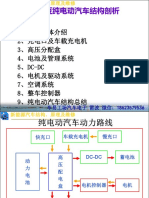
- 三 、知豆纯电动汽车结构剖析Document126 pages三 、知豆纯电动汽车结构剖析Phang KumwingNo ratings yet
- DY3A、BDocument7 pagesDY3A、Bouyangxin1991No ratings yet