You might also like
- 高中物理公式列表Document36 pages高中物理公式列表哭哭麻頭No ratings yet
- TestDocument91 pagesTestpraysakuraNo ratings yet
- PLC工 WS2N-10MR-Z V1.3Document16 pagesPLC工 WS2N-10MR-Z V1.3splinter inc50% (2)
- 声学基础 习题解答Document224 pages声学基础 习题解答FanYu ZongNo ratings yet
- 第二章 探究匀变速规律Document12 pages第二章 探究匀变速规律api-3700092No ratings yet
- TG35C60 TriacDocument2 pagesTG35C60 TriacOcbit LowbyteNo ratings yet
- Verouillage Electroniquev003Document1 pageVerouillage Electroniquev003achil de troyNo ratings yet
- 第8讲 匀变速直线运动规律分析及应用Document8 pages第8讲 匀变速直线运动规律分析及应用加赛 郭No ratings yet
- 连续系统的串联校正 (Series-correction for continuous sysDocument24 pages连续系统的串联校正 (Series-correction for continuous sysHunger GryllsNo ratings yet
- 流體機械設計Document272 pages流體機械設計mjnjrgj2s7No ratings yet
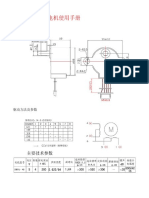
- 24BYJ48 步进电机使用手册Document7 pages24BYJ48 步进电机使用手册cqlNo ratings yet
- 1chap 01Document14 pages1chap 01eltytanNo ratings yet
- 拉伐尔喷管曲线方程的建立及其数控加工Document5 pages拉伐尔喷管曲线方程的建立及其数控加工Jian LinNo ratings yet
- 扭擺與剛性係數結報Document5 pages扭擺與剛性係數結報邱柏鈞No ratings yet
- Toyo Tdog-31Document8 pagesToyo Tdog-31ijen huangNo ratings yet
- 集成运放习题Document9 pages集成运放习题Sunito Suen (Sunito)No ratings yet
- 2.3 匀变速直线运动的位移与时间的关系- 【新教材】人教版 (2019) 高中物理必修第一册课件 (共20张PPT)Document20 pages2.3 匀变速直线运动的位移与时间的关系- 【新教材】人教版 (2019) 高中物理必修第一册课件 (共20张PPT)lmj3981091No ratings yet
- Qtc Aegis144n及96n集合式電錶操作手冊 10v4 201401Document16 pagesQtc Aegis144n及96n集合式電錶操作手冊 10v4 201401簡維政No ratings yet
- 第七章 脉冲波形的产生和整形电路Document39 pages第七章 脉冲波形的产生和整形电路古翱翔No ratings yet
- 电梯计算书1Document19 pages电梯计算书1Takudzwa MiltonNo ratings yet
- 202BJTSchemittTrigger110310110 賴東彥Document20 pages202BJTSchemittTrigger110310110 賴東彥jacklai900906No ratings yet
- 13感應電動機特性Document4 pages13感應電動機特性Zac2 Chris (002)No ratings yet
- 直升机传动系统设计方法研究 第三章直升机齿轮传动优化设计方法 25 44 王卫刚Document20 pages直升机传动系统设计方法研究 第三章直升机齿轮传动优化设计方法 25 44 王卫刚shiguangmodiNo ratings yet
- CADLab 4 Buffer Ver3Document3 pagesCADLab 4 Buffer Ver3沈錫山No ratings yet
- 5 系統時域響應Document30 pages5 系統時域響應Yi Ying Chang100% (1)
- 電路學 (一) -單元五-一階 RL 與 RC 電路的響應Document45 pages電路學 (一) -單元五-一階 RL 與 RC 電路的響應楊明倫No ratings yet
- 2Document10 pages2葉彥均No ratings yet
- T0835NF1PDocument6 pagesT0835NF1PJose Domingo Maltez VallecilloNo ratings yet
- 實驗三 交流電的工具Document12 pages實驗三 交流電的工具揚昆綻No ratings yet
- Topic 02 105Document7 pagesTopic 02 105Jayden KamNo ratings yet
- Topic 02 105Document7 pagesTopic 02 105Jayden KamNo ratings yet
- 計算機使用方法 (fx 991EX) 改Document12 pages計算機使用方法 (fx 991EX) 改金莎No ratings yet
- 111-2 Data Analysis Assignment Department and level: 物理一 Name:黃定芃 Student ID:B11202020 On 03, 16, 2023 Answer 1.Descriptive Statistics and the Central Limit TheoremDocument6 pages111-2 Data Analysis Assignment Department and level: 物理一 Name:黃定芃 Student ID:B11202020 On 03, 16, 2023 Answer 1.Descriptive Statistics and the Central Limit TheoremhuangNo ratings yet
- 因果关系、协整、平稳、Var、Svar以及多个应用实例的eviews讲义Document201 pages因果关系、协整、平稳、Var、Svar以及多个应用实例的eviews讲义AITING LUNo ratings yet
- QTC 集合式電錶 - Aegis 系列 (10V5版) : RS485 位址說明表 (Holding Registers)Document2 pagesQTC 集合式電錶 - Aegis 系列 (10V5版) : RS485 位址說明表 (Holding Registers)簡維政100% (1)
- 4 - GSD - 条缝型风口Document11 pages4 - GSD - 条缝型风口LEE LIUNo ratings yet
- UntitledDocument24 pagesUntitled高詠鈞No ratings yet
- Basic CircuitDocument9 pagesBasic CircuitTim WongNo ratings yet
- Umw-C347376Document8 pagesUmw-C347376Andres GvNo ratings yet
- 轧机Document9 pages轧机liuxin6166711No ratings yet
- 線性5Document71 pages線性5tatbn2000No ratings yet
- 熱力學第二定律Document36 pages熱力學第二定律Liang FrankNo ratings yet
- AH11 及 AH21 保護協調計算書 (2023-05-16) (By Richards)Document17 pagesAH11 及 AH21 保護協調計算書 (2023-05-16) (By Richards)bryan.jianxingNo ratings yet
- 電路學 (一) 單元四 電感與電容Document33 pages電路學 (一) 單元四 電感與電容楊明倫No ratings yet
- Tutorial3 ReferenceDocument5 pagesTutorial3 ReferenceQuoc NguyenNo ratings yet
- OpenDocument78 pagesOpenGogo ponNo ratings yet
- 1.3 曲线运动的描述 运动学中的两类问题Document25 pages1.3 曲线运动的描述 运动学中的两类问题zj chenNo ratings yet
- 自动控制原理习题解答 (第二版) (余成波 张莲 胡Document42 pages自动控制原理习题解答 (第二版) (余成波 张莲 胡Jianbin LiuNo ratings yet
- 力學 (解答)Document7 pages力學 (解答)陳傳中No ratings yet
- 角簡諧運動補充資料20230925Document2 pages角簡諧運動補充資料20230925黑洞小蛇No ratings yet
- Shenzhen Sikewei Electronics Co., LTD.: (S&CIC0754)Document10 pagesShenzhen Sikewei Electronics Co., LTD.: (S&CIC0754)Denny SuryadiNo ratings yet
- 电容电感计算公式Document18 pages电容电感计算公式jkx hjjNo ratings yet
- CH 2Document18 pagesCH 2gary.39462182No ratings yet
- 5-4-22 下午1124 Microsoft LensDocument5 pages5-4-22 下午1124 Microsoft LensBrian HuangNo ratings yet
- 《NICE900门机控制器调试手册》20130226) 中文Document28 pages《NICE900门机控制器调试手册》20130226) 中文jiangang wuNo ratings yet
- 4-3 向量之向量式 , 曲線之 弧長 (58頁) (內容少重點)Document58 pages4-3 向量之向量式 , 曲線之 弧長 (58頁) (內容少重點)小凡No ratings yet
- Eliwell 2011 Catalogue RUS A4 High 98Document1 pageEliwell 2011 Catalogue RUS A4 High 98Януш ЗейдальNo ratings yet
- 全国大学生电子设计大赛获奖论文Document27 pages全国大学生电子设计大赛获奖论文baijingleiziNo ratings yet
- Chap.2 1 Kinetics DerivativeDocument26 pagesChap.2 1 Kinetics Derivativechinlin0109No ratings yet
- 集成电路设计实践 运放设计 901602518Document52 pages集成电路设计实践 运放设计 901602518anonNo ratings yet
- 心率變異度線性分析參數意義Document5 pages心率變異度線性分析參數意義林煒No ratings yet
- Research Methods - Factor Analysis and Cluster Analysis SlidesDocument103 pagesResearch Methods - Factor Analysis and Cluster Analysis Slides任婷No ratings yet
- 长方体和正方体表面积Document24 pages长方体和正方体表面积Florence EleeNo ratings yet
- Answer 08Document13 pagesAnswer 08張祐瑜No ratings yet
- MAT235试听 2018-2019 Instructor VersionDocument19 pagesMAT235试听 2018-2019 Instructor Versionyiyang huaNo ratings yet