You might also like
- University Institute of Engineering Department of Computer Science & EngineeringDocument11 pagesUniversity Institute of Engineering Department of Computer Science & EngineeringEakanshNo ratings yet
- University Institute of Engineering Department of Mechanical EngineeringDocument9 pagesUniversity Institute of Engineering Department of Mechanical EngineeringPratik MishraNo ratings yet
- Exp 8Document9 pagesExp 8Peeyush ChaurasiaNo ratings yet
- Exp 9Document9 pagesExp 9Peeyush ChaurasiaNo ratings yet
- Aman Raj DTDocument8 pagesAman Raj DTSachin kumarNo ratings yet
- University Institute of Engineering Department of Computer Science & EngineeringDocument7 pagesUniversity Institute of Engineering Department of Computer Science & EngineeringPratik MishraNo ratings yet
- University Institute of Engineering Department of Computer Science & EngineeringDocument5 pagesUniversity Institute of Engineering Department of Computer Science & EngineeringsagarNo ratings yet
- University Institute of Engineering Department of Computer Science & EngineeringDocument6 pagesUniversity Institute of Engineering Department of Computer Science & EngineeringHarsh 8952No ratings yet
- Experiment: 1.2: University Institute of Engineering Department of Computer Science & EngineeringDocument8 pagesExperiment: 1.2: University Institute of Engineering Department of Computer Science & EngineeringAyush RaghbotraNo ratings yet
- DT 1.2 JatinDocument8 pagesDT 1.2 JatinKartik AgarwalNo ratings yet
- Practical 3.1 C++Document5 pagesPractical 3.1 C++Vinay GuptaNo ratings yet
- CS 03 DTDocument7 pagesCS 03 DTDeepraj RajputNo ratings yet
- Dipesh DTDocument6 pagesDipesh DTjksnkjNo ratings yet
- Experiment: 1.3: University Institute of Engineering Department of Computer Science & EngineeringDocument4 pagesExperiment: 1.3: University Institute of Engineering Department of Computer Science & EngineeringAyush RaghbotraNo ratings yet
- Aman DT 3.2Document12 pagesAman DT 3.2Dipak RajbharNo ratings yet
- Exp 3.1 DT SaugatDocument5 pagesExp 3.1 DT SaugatSaugat DuttaNo ratings yet
- University Institute of Engineering Department of Computer Science & EngineeringDocument8 pagesUniversity Institute of Engineering Department of Computer Science & EngineeringMohammed Ali KazmiNo ratings yet
- University Institute of Engineering Department of Mechanical EngineeringDocument7 pagesUniversity Institute of Engineering Department of Mechanical EngineeringPratik MishraNo ratings yet
- Experiment: University Institute of Engineering Department of Computer Science & EngineeringDocument14 pagesExperiment: University Institute of Engineering Department of Computer Science & EngineeringAkanksha YadavNo ratings yet
- Experiment: University Institute of Engineering Department of Computer Science & EngineeringDocument11 pagesExperiment: University Institute of Engineering Department of Computer Science & EngineeringAmitNo ratings yet
- Exp 2.5 Image ProcessingDocument5 pagesExp 2.5 Image ProcessingRekha RaniNo ratings yet
- Exp 2.5 Image Processing PDFDocument5 pagesExp 2.5 Image Processing PDFRekha RaniNo ratings yet
- DT 1.2 DivyanshuDocument11 pagesDT 1.2 DivyanshuGautam MandoliyaNo ratings yet
- University Institute of EngineeringDocument9 pagesUniversity Institute of EngineeringGaurav JainNo ratings yet
- University Institute of Engineering Department of MechatronicsDocument6 pagesUniversity Institute of Engineering Department of MechatronicsVinay GuptaNo ratings yet
- Nakul DT 9 Exp PDFDocument5 pagesNakul DT 9 Exp PDFjksnkjNo ratings yet
- Java 1.1 PARAMDocument18 pagesJava 1.1 PARAMMohsin kakrooNo ratings yet
- Nakul DT 9 PDFDocument5 pagesNakul DT 9 PDFjksnkjNo ratings yet
- University Institute of Engineering Department of Computer Science & EngineeringDocument6 pagesUniversity Institute of Engineering Department of Computer Science & EngineeringPratik MishraNo ratings yet
- Roshan DT (22BCS10095) 203-ADocument67 pagesRoshan DT (22BCS10095) 203-AAmalNo ratings yet
- University Institute of Engineering Department of Computer Science & EngineeringDocument7 pagesUniversity Institute of Engineering Department of Computer Science & EngineeringDipak RajbharNo ratings yet
- Worksheet DT 1.2 CUSZDocument6 pagesWorksheet DT 1.2 CUSZDipak RajbharNo ratings yet
- AbhishekDS1 1Document13 pagesAbhishekDS1 1Abhishek MishraNo ratings yet
- Experiment 2.1 - Bablu Kumar DTDocument24 pagesExperiment 2.1 - Bablu Kumar DTBablu RaazNo ratings yet
- PyCaret RegressionDocument13 pagesPyCaret RegressionArslan MansooriNo ratings yet
- Sample WorksheetDocument7 pagesSample WorksheetHarsh ThakurNo ratings yet
- Implementation of Disk Scheduling Algorithms - FCFS,: SSTF, CscanDocument8 pagesImplementation of Disk Scheduling Algorithms - FCFS,: SSTF, CscanSmit BhenjaliyaNo ratings yet
- University Institute of Engineering Department of Computer Science & EngineeringDocument18 pagesUniversity Institute of Engineering Department of Computer Science & EngineeringAman LathNo ratings yet
- Aviral DTDocument36 pagesAviral DTAman Pratap SinghNo ratings yet
- University Institute of Engineering Department of Computer Science & EngineeringDocument15 pagesUniversity Institute of Engineering Department of Computer Science & EngineeringDipak RajbharNo ratings yet
- Dbms Unit 3 - Exp-3.1 q1Document3 pagesDbms Unit 3 - Exp-3.1 q1ཞàhûl çháúhãñNo ratings yet
- Experiment 1.1 - DT-2 - 21BCS10799 (NITIN KUMAR JANGIR) - convertedSSSDocument7 pagesExperiment 1.1 - DT-2 - 21BCS10799 (NITIN KUMAR JANGIR) - convertedSSSRavi RajNo ratings yet
- Experiment 1.1 - DT-2 - 21BCS1295Document7 pagesExperiment 1.1 - DT-2 - 21BCS1295Praveen KumarNo ratings yet
- Aviral DT 1.2Document11 pagesAviral DT 1.2Aman Pratap SinghNo ratings yet
- DT Worksheet 1.3 21BCS3920Document5 pagesDT Worksheet 1.3 21BCS3920Gaurav saiNo ratings yet
- DT1.2 Shraddha ChaharDocument18 pagesDT1.2 Shraddha ChaharPraveen Kumar100% (1)
- Pammi dt9Document9 pagesPammi dt9paramjeetcuchdNo ratings yet
- University Institute of Engineering Department of Computer Science & EngineeringDocument11 pagesUniversity Institute of Engineering Department of Computer Science & EngineeringSanya SinghNo ratings yet
- Exp-1 2 PDFDocument2 pagesExp-1 2 PDFAjayNo ratings yet
- Aman DS 2.1Document5 pagesAman DS 2.1Siddhartha AnandNo ratings yet
- Sample BEEE WorksheetDocument7 pagesSample BEEE WorksheetAvishek KumarNo ratings yet
- IPL Worksheet 1Document3 pagesIPL Worksheet 1kartikeyaNo ratings yet
- Exp 5 PDFDocument2 pagesExp 5 PDFAjayNo ratings yet
- Worksheet 1.1 DT 21BCS7524Document8 pagesWorksheet 1.1 DT 21BCS7524Anurag BhartiNo ratings yet
- S.I.E.S College of Arts, Science and Commerce, Sion (W), Mumbai - 400 022Document31 pagesS.I.E.S College of Arts, Science and Commerce, Sion (W), Mumbai - 400 022Rohit YadavNo ratings yet
- DS 2.1 SidDocument5 pagesDS 2.1 SidSiddhartha AnandNo ratings yet
- DT Worksheet 4Document8 pagesDT Worksheet 4ngupta.araNo ratings yet
- Lab 2 OopDocument5 pagesLab 2 OopHA AimNo ratings yet
- University Institute of Engineering Department of Computer Science & EngineeringDocument8 pagesUniversity Institute of Engineering Department of Computer Science & Engineeringngupta.araNo ratings yet
- List of Iconic CPG Projects in SingaporeDocument2 pagesList of Iconic CPG Projects in SingaporeKS LeeNo ratings yet
- Playing With Pop-Ups - The Art of Dimensional, Moving Paper DesignsDocument147 pagesPlaying With Pop-Ups - The Art of Dimensional, Moving Paper DesignsSara100% (4)
- Surgery - 2020 With CorrectionDocument70 pagesSurgery - 2020 With CorrectionBaraa KassisNo ratings yet
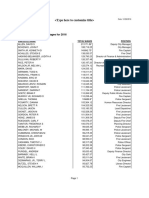
- 2016 W-2 Gross Wages CityDocument16 pages2016 W-2 Gross Wages CityportsmouthheraldNo ratings yet
- Research 093502Document8 pagesResearch 093502Chrlszjhon Sales SuguitanNo ratings yet
- 82686b - LOAD SHARING MODULEDocument2 pages82686b - LOAD SHARING MODULENguyễn Đình ĐứcNo ratings yet
- Architectural ConcreteDocument24 pagesArchitectural ConcreteSaud PathiranaNo ratings yet
- Product NDC # Compare To Strength Size Form Case Pack Abcoe# Cardinal Cin # Mckesson Oe # M&Doe#Document14 pagesProduct NDC # Compare To Strength Size Form Case Pack Abcoe# Cardinal Cin # Mckesson Oe # M&Doe#Paras ShardaNo ratings yet
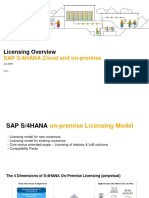
- S4 HANALicensing Model External V19Document28 pagesS4 HANALicensing Model External V19Edir JuniorNo ratings yet
- PE MELCs Grade 3Document4 pagesPE MELCs Grade 3MARISSA BERNALDONo ratings yet
- CH 04Document19 pagesCH 04Charmaine Bernados BrucalNo ratings yet
- 788 ManualDocument16 pages788 Manualn0rdNo ratings yet
- T5 B11 Victor Manuel Lopez-Flores FDR - FBI 302s Re VA ID Cards For Hanjour and Almihdhar 195Document11 pagesT5 B11 Victor Manuel Lopez-Flores FDR - FBI 302s Re VA ID Cards For Hanjour and Almihdhar 1959/11 Document Archive100% (2)
- (Campus of Open Learning) University of Delhi Delhi-110007Document1 page(Campus of Open Learning) University of Delhi Delhi-110007Sahil Singh RanaNo ratings yet
- Epreuve Anglais EG@2022Document12 pagesEpreuve Anglais EG@2022Tresor SokoudjouNo ratings yet
- Gracie Warhurst WarhurstDocument1 pageGracie Warhurst Warhurstapi-439916871No ratings yet
- Binary OptionsDocument24 pagesBinary Optionssamsa7No ratings yet
- A Noble Noose of Methods - ExtendedDocument388 pagesA Noble Noose of Methods - ExtendedtomasiskoNo ratings yet
- Project Management TY BSC ITDocument57 pagesProject Management TY BSC ITdarshan130275% (12)
- Modern School For SaxophoneDocument23 pagesModern School For SaxophoneAllen Demiter65% (23)
- Midi Pro Adapter ManualDocument34 pagesMidi Pro Adapter ManualUli ZukowskiNo ratings yet
- Aakriti 1Document92 pagesAakriti 1raghav bansalNo ratings yet
- Guardcam InstructionsDocument12 pagesGuardcam InstructionsCompuFix RepairsNo ratings yet
- Axera D06Document2 pagesAxera D06Cristián Fernando Cristóbal RoblesNo ratings yet
- Conservation Assignment 02Document16 pagesConservation Assignment 02RAJU VENKATANo ratings yet
- Introduction To DifferentiationDocument10 pagesIntroduction To DifferentiationaurennosNo ratings yet
- Syllabus: What Is Artificial Intelligence? ProblemsDocument66 pagesSyllabus: What Is Artificial Intelligence? ProblemsUdupiSri groupNo ratings yet
- RMC 102-2017 HighlightsDocument3 pagesRMC 102-2017 HighlightsmmeeeowwNo ratings yet
- Curriculum Guide Ay 2021-2022: Dr. Gloria Lacson Foundation Colleges, IncDocument9 pagesCurriculum Guide Ay 2021-2022: Dr. Gloria Lacson Foundation Colleges, IncJean Marie Itang GarciaNo ratings yet
- Shelly e CommerceDocument13 pagesShelly e CommerceVarun_Arya_8382No ratings yet