You might also like
- 固緯電子11252020技術研討會簡報資料 4 (吳俊賢)Document55 pages固緯電子11252020技術研討會簡報資料 4 (吳俊賢)Vincent ChingNo ratings yet
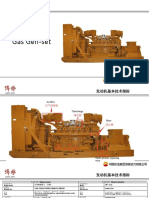
- 600GF-T Gas Genset 天然气发电机组Document9 pages600GF-T Gas Genset 天然气发电机组Juan Daniel Galindo RamirezNo ratings yet
- PW2 0VK+++220-240V+50 60Hz+M LBPDocument9 pagesPW2 0VK+++220-240V+50 60Hz+M LBPtrieutuyenhoang100% (1)
- Sla 05VDC SL CDocument2 pagesSla 05VDC SL CEveraldo JúniorNo ratings yet
- Ningbo Songle Relay SRA 05VDC CL - C87714Document2 pagesNingbo Songle Relay SRA 05VDC CL - C87714eds.netNo ratings yet
- SRD DC5V SL A - C688861Document2 pagesSRD DC5V SL A - C688861Francesca FraNo ratings yet
- 丹弗斯MBC5100Document8 pages丹弗斯MBC5100JUN ZHOUNo ratings yet
- QGD55P技术参数Document3 pagesQGD55P技术参数RUN GONo ratings yet
- 1.M280 - Product User Manual - A02 ControllerDocument28 pages1.M280 - Product User Manual - A02 Controllerrizki bagusNo ratings yet
- ISUZU Diesel Engine Specification For A-6BG1QC02.pdfA-6BG1QC02 PDFDocument9 pagesISUZU Diesel Engine Specification For A-6BG1QC02.pdfA-6BG1QC02 PDFFaouzi ZorgatiNo ratings yet
- 3AF01 40.5kVDocument16 pages3AF01 40.5kVsincos1983No ratings yet
- JFSB116Z12 Specification 4000 RPMDocument7 pagesJFSB116Z12 Specification 4000 RPMRafael Antonio Santana GarciaNo ratings yet
- SCH HVX AchDocument8 pagesSCH HVX Achfly19810922No ratings yet
- 12v 350w 變壓器 LRS 350 SPEC CNDocument4 pages12v 350w 變壓器 LRS 350 SPEC CNsuanyuanNo ratings yet
- LMR14050 DatasheetDocument33 pagesLMR14050 DatasheetDavideDicertoNo ratings yet
- Datasheet 40n120kda PDFDocument2 pagesDatasheet 40n120kda PDFMohamed KhaldiNo ratings yet
- The Maximum Range WeightDocument5 pagesThe Maximum Range Weightkude kulayeNo ratings yet
- N20+motors C15011+6VDocument9 pagesN20+motors C15011+6VAkash JosephNo ratings yet
- ASM93V11VDZDocument14 pagesASM93V11VDZpant.vk8514No ratings yet
- DMT80600T080 25WTRN1Document4 pagesDMT80600T080 25WTRN1Radu Claudiu LitaNo ratings yet
- Gree-Lamda Qxa-E232rh050 Article 1604089090511295 en SsDocument15 pagesGree-Lamda Qxa-E232rh050 Article 1604089090511295 en SsYui HdzNo ratings yet
- MY2NJ OmronDocument6 pagesMY2NJ OmronCor beilleNo ratings yet
- UtilitySure™ ER4830 - S充电模块-CN-V1Document2 pagesUtilitySure™ ER4830 - S充电模块-CN-V1Charmer JiaNo ratings yet
- 20170703 HV6130規格表Document1 page20170703 HV6130規格表智飛科技TAIWAN-UAVNo ratings yet
- RFSZ 柔性罗氏线圈.compressedDocument1 pageRFSZ 柔性罗氏线圈.compressedBaglaNo ratings yet
- W8160中文版Document6 pagesW8160中文版pkpeng070328No ratings yet
- CYTC76 Long-Hole Production Drilling Jumbo 22U+DRILL STEM BANKDocument5 pagesCYTC76 Long-Hole Production Drilling Jumbo 22U+DRILL STEM BANKJhonatan rincon martinezNo ratings yet
- TPS560430YFDBVTDocument33 pagesTPS560430YFDBVTMuhammad Jalal AldeenNo ratings yet
- Ninglu Brochure AM706E + AM706SDocument2 pagesNinglu Brochure AM706E + AM706SPrashant S NagwekarNo ratings yet
- FR309 Siyu PDFDocument2 pagesFR309 Siyu PDFChum DeNo ratings yet
- 日立压缩机维修说明书Document86 pages日立压缩机维修说明书唐景瑞No ratings yet
- DOC025271754Document14 pagesDOC025271754gev312No ratings yet
- FS5106B SpecsDocument2 pagesFS5106B SpecsGS RathoreNo ratings yet
- E22953 - Fiche Technique Du Feetech Standard ServoDocument2 pagesE22953 - Fiche Technique Du Feetech Standard Servocedric.seguinNo ratings yet
- ANT8816 Amplificador de AudioDocument8 pagesANT8816 Amplificador de AudioRamon Jara100% (1)
- SS-172SBCxl-C01-HZ 210521Document11 pagesSS-172SBCxl-C01-HZ 210521WaltencirNo ratings yet
- KP 800 42Document4 pagesKP 800 42Sina MehrabafiNo ratings yet
- Digital Power Meter AmcDocument25 pagesDigital Power Meter AmcMohamed ShiraziNo ratings yet
- 04-08 - RE06M^W 电磁比例溢流阀Document4 pages04-08 - RE06M^W 电磁比例溢流阀ZHOUNo ratings yet
- DY3A、BDocument7 pagesDY3A、Bouyangxin1991No ratings yet
- KP 1400 52Document4 pagesKP 1400 52mahmoodalmotamize1No ratings yet
- SP Initial M 1 5k (II) TWDocument1 pageSP Initial M 1 5k (II) TWBruce YangNo ratings yet
- I60 Catalog TW enDocument2 pagesI60 Catalog TW enDollar NeedNo ratings yet
- Data SheetDocument3 pagesData SheetAurelio Caballero marquezNo ratings yet
- DELTA IA-ASDA ASDA-A3 C TC 20201215 WebDocument52 pagesDELTA IA-ASDA ASDA-A3 C TC 20201215 Webluck147258369No ratings yet
- Tuozhan S4 3528rgbta A - C2827321Document11 pagesTuozhan S4 3528rgbta A - C2827321black_wolverineNo ratings yet
- CYTC76 采矿钻车参数Document5 pagesCYTC76 采矿钻车参数VicNo ratings yet
- Sw2604a SamwinDocument6 pagesSw2604a SamwinRjati devamNo ratings yet
- HLG 120H C1400 SpecDocument10 pagesHLG 120H C1400 SpecaecprabowoNo ratings yet
- PCC275B NT855 GaDocument5 pagesPCC275B NT855 GaDecky PrayogaNo ratings yet
- ETA9742 V1.0 ChsDocument5 pagesETA9742 V1.0 ChsmhasansharifiNo ratings yet
- 13 PV1800 ProDocument1 page13 PV1800 Prokaungmyatkyaw804No ratings yet
- PDAN標準型DMDocument4 pagesPDAN標準型DMDương Văn HòaNo ratings yet
- For reference only: 客户名称/Customer:Document16 pagesFor reference only: 客户名称/Customer:piyuNo ratings yet
- PTB110 Datasheet B210681ZH C LoRes PDFDocument2 pagesPTB110 Datasheet B210681ZH C LoRes PDFaseNo ratings yet
- new-SC310E5-088-XXX SpecificationDocument8 pagesnew-SC310E5-088-XXX SpecificationHùng Hồ XuânNo ratings yet
- B3S Spec SheetDocument2 pagesB3S Spec Sheettanzeem ansariNo ratings yet
- 孟加拉阿苏甘杰东项目230kV电力电缆耐压试验方案Document13 pages孟加拉阿苏甘杰东项目230kV电力电缆耐压试验方案刘佳No ratings yet
- 2014年07月23日 - 以农立业:油棕高密度种克隆 - 每日一专 - 农业 - 南洋网Document2 pages2014年07月23日 - 以农立业:油棕高密度种克隆 - 每日一专 - 农业 - 南洋网Cheong Wen YuanNo ratings yet
- BQ02 TWDocument26 pagesBQ02 TWAndiniPermanaNo ratings yet
- SAP数据源与ECC底表Document5 pagesSAP数据源与ECC底表LiQiangNo ratings yet
- Taiwan Panorama 2019 FebDocument128 pagesTaiwan Panorama 2019 FebKwang HwaNo ratings yet
- UntitledDocument18 pagesUntitled陳珊珊No ratings yet