You might also like
- CAN and FPGA Communication Engineering: Implementation of a CAN Bus based Measurement System on an FPGA Development KitFrom EverandCAN and FPGA Communication Engineering: Implementation of a CAN Bus based Measurement System on an FPGA Development KitNo ratings yet
- Despre Disq 1.2Document23 pagesDespre Disq 1.2Catalin Cerasel FlaminzeanuNo ratings yet
- Manual Harris AN - PRC-117G - EnglishDocument297 pagesManual Harris AN - PRC-117G - EnglishDanieloRCD100% (1)
- Field Communication Unit: Reference ManualDocument74 pagesField Communication Unit: Reference ManualRobertt StoneNo ratings yet
- Kuband TXDocument123 pagesKuband TXAnimesh VatsaNo ratings yet
- A Series Training Manual - Maintenance CourseDocument280 pagesA Series Training Manual - Maintenance CourseTetsusaigaNo ratings yet
- Fax 207Document21 pagesFax 207YOUSSEF ABDELSALAMNo ratings yet
- Evxp System Maintenance Manual: Honeywell International AerospaceDocument90 pagesEvxp System Maintenance Manual: Honeywell International AerospaceBruno GonçalvesNo ratings yet
- OXYGEN™ Cabinet - Integration Guide For Player Tracking and Online Components 1.2Document13 pagesOXYGEN™ Cabinet - Integration Guide For Player Tracking and Online Components 1.2villa1960No ratings yet
- Elfin-EW1X User ManualV1.3 (20200415)Document26 pagesElfin-EW1X User ManualV1.3 (20200415)thebuzzdevNo ratings yet
- Quidway AR 18 - 1X Series Routers Installation - ManualDocument86 pagesQuidway AR 18 - 1X Series Routers Installation - ManualCarmen Rosa LopezNo ratings yet
- Feed Manual Version 2 3Document40 pagesFeed Manual Version 2 3amelchorNo ratings yet
- KNS - Z10MK2 - Rev 2.3Document127 pagesKNS - Z10MK2 - Rev 2.3Sha LeNo ratings yet
- TMS320C6413/C6418 EVM: Reference TechnicalDocument78 pagesTMS320C6413/C6418 EVM: Reference TechnicalarinramNo ratings yet
- Kns Supertrack z12mk2 Manual Rev 2.3Document127 pagesKns Supertrack z12mk2 Manual Rev 2.3Никита БелинскийNo ratings yet
- KVH L3 Owners Manual - Serial 0308xxxx - PresentDocument77 pagesKVH L3 Owners Manual - Serial 0308xxxx - Presentbobrae62No ratings yet
- An1017 Using The st7 Universal Serial Bus Microncontroller StmicroelectronicsDocument38 pagesAn1017 Using The st7 Universal Serial Bus Microncontroller StmicroelectronicsAbdullah BhuttaNo ratings yet
- SPC-400TT: Premium Sound Upgrade For Audi Tt2 (2007 - )Document24 pagesSPC-400TT: Premium Sound Upgrade For Audi Tt2 (2007 - )Makis BitbyteNo ratings yet
- UNIVERGE SV9100 Hardware Manual - Issue 9.1Document574 pagesUNIVERGE SV9100 Hardware Manual - Issue 9.1TonyNo ratings yet
- T3afg40 T3afg80 T3afg120 User ManualDocument172 pagesT3afg40 T3afg80 T3afg120 User ManualMalburgNo ratings yet
- M68HC11E Family: Data SheetDocument242 pagesM68HC11E Family: Data SheetAntony RatheeshNo ratings yet
- Varioguide: Varioguide Novatel Varioguide TrimbleDocument116 pagesVarioguide: Varioguide Novatel Varioguide TrimbleDainius SimonaitisNo ratings yet
- VXP System Maintenance ManualDocument105 pagesVXP System Maintenance ManualIbrahim Asif100% (1)
- Z12Mk2 ManualDocument124 pagesZ12Mk2 ManualArun VermaNo ratings yet
- Ecu-R: Installation / User ManualDocument23 pagesEcu-R: Installation / User ManualHYDRO TECH INGENIERIA SAS OFICIALNo ratings yet
- Wwidmgr v13 PDFDocument45 pagesWwidmgr v13 PDFgruisingerNo ratings yet
- easyTRX3 AtoN A20004 Bedienungsanleitung v2 EN 20200618Document27 pageseasyTRX3 AtoN A20004 Bedienungsanleitung v2 EN 20200618AsterNo ratings yet
- Gf868 Startup Guide Revf1Document80 pagesGf868 Startup Guide Revf1prihartono_diasNo ratings yet
- 1084 ManualDocument212 pages1084 ManualYonghee LeeNo ratings yet
- Scs Manual Ptc-Iipro 4.0Document298 pagesScs Manual Ptc-Iipro 4.0Md Rodi BidinNo ratings yet
- Acopos 1045Document278 pagesAcopos 1045industronicaNo ratings yet
- Ethernet Units. Construction of NetworksDocument289 pagesEthernet Units. Construction of NetworksPetrovich10No ratings yet
- Harmony Radio, R2.8: Hardware Installation GuideDocument157 pagesHarmony Radio, R2.8: Hardware Installation GuideСергій ХрущовNo ratings yet
- PSM 500Document124 pagesPSM 500clima ahoraNo ratings yet
- Am FM DabDocument18 pagesAm FM DabGaetano CosentinoNo ratings yet
- Manual GSP 1094BDocument131 pagesManual GSP 1094Brichardt999No ratings yet
- CANopen PC-based Automation v4-2 enDocument105 pagesCANopen PC-based Automation v4-2 enwalter allNo ratings yet
- TRX - SDR 2020 01 23Document16 pagesTRX - SDR 2020 01 23Yoav Sharon100% (1)
- ZORRO Full English Manual V1.0Document39 pagesZORRO Full English Manual V1.0reuven.abbouNo ratings yet
- Vsat Manual: Ri-Series Dsi-SeriesDocument29 pagesVsat Manual: Ri-Series Dsi-SeriesbianNo ratings yet
- Xmt868i Startupguide Revh EnglishDocument96 pagesXmt868i Startupguide Revh EnglishyogeunysNo ratings yet
- Hummer-Bot-2.0 Instruction Manual V.2.0: Revised Version of HistoryDocument113 pagesHummer-Bot-2.0 Instruction Manual V.2.0: Revised Version of Historypeter GulyasNo ratings yet
- WB2500 User ManualDocument84 pagesWB2500 User Manualaurel_c12-1No ratings yet
- CelLink 4x2 ManualDocument228 pagesCelLink 4x2 Manualnyaa_joel100% (1)
- Impinj XArray XSpan Installation and Operations Guide 6.4Document59 pagesImpinj XArray XSpan Installation and Operations Guide 6.4Rayhan IyanNo ratings yet
- PM3082 User ManualDocument197 pagesPM3082 User ManualOvidio RodríguezNo ratings yet
- Dsp244 Manual enDocument51 pagesDsp244 Manual enBibi DanilaNo ratings yet
- Abell A600 (VHF)Document53 pagesAbell A600 (VHF)Arnaldo AguilarNo ratings yet
- 1088 ManualDocument279 pages1088 ManualMamour brshimNo ratings yet
- AP-7532 Access Point: Installation GuideDocument57 pagesAP-7532 Access Point: Installation Guidejarko tarrilloNo ratings yet
- Practical Modern SCADA Protocols: DNP3, 60870.5 and Related SystemsFrom EverandPractical Modern SCADA Protocols: DNP3, 60870.5 and Related SystemsRating: 5 out of 5 stars5/5 (6)
- Digital Compensation for Analog Front-Ends: A New Approach to Wireless Transceiver DesignFrom EverandDigital Compensation for Analog Front-Ends: A New Approach to Wireless Transceiver DesignNo ratings yet
- Space/Terrestrial Mobile Networks: Internet Access and QoS SupportFrom EverandSpace/Terrestrial Mobile Networks: Internet Access and QoS SupportNo ratings yet
- GSM - Architecture, Protocols and ServicesFrom EverandGSM - Architecture, Protocols and ServicesRating: 1 out of 5 stars1/5 (1)
- Advanced PIC Microcontroller Projects in C: From USB to RTOS with the PIC 18F SeriesFrom EverandAdvanced PIC Microcontroller Projects in C: From USB to RTOS with the PIC 18F SeriesRating: 5 out of 5 stars5/5 (1)
- LCD Claa154wb05aDocument20 pagesLCD Claa154wb05aHamilton fehcboNo ratings yet
- Arkbird Autopilot SystemDocument21 pagesArkbird Autopilot SystemHamilton fehcboNo ratings yet
- Antenna Tracker Rssi v2 InstructionsDocument8 pagesAntenna Tracker Rssi v2 InstructionsHamilton fehcboNo ratings yet
- Como Mudar A Cor Do Led Do EscDocument2 pagesComo Mudar A Cor Do Led Do EscHamilton fehcboNo ratings yet
- Color Monitor: Service ManualDocument20 pagesColor Monitor: Service Manualmalord958No ratings yet
- Principles of MKTNG Q4 Module 2 For StudentsDocument15 pagesPrinciples of MKTNG Q4 Module 2 For StudentsRich Allen Mier UyNo ratings yet
- Alchemy Gold Slot Demo RTP 96.78 Free PlayDocument1 pageAlchemy Gold Slot Demo RTP 96.78 Free Playbc287724No ratings yet
- Food Cart Work Immersion Group 1mDocument19 pagesFood Cart Work Immersion Group 1mEurica LimNo ratings yet
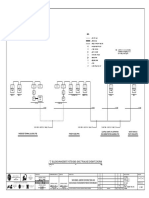
- Building Management System (BMS) Basic Trunkline Schematic Diagram 2Document3 pagesBuilding Management System (BMS) Basic Trunkline Schematic Diagram 2Anonymous NcB95G6XwNo ratings yet
- 1E Star Trek Customizable Card Game - 9 Deep Space 9 RulebookDocument16 pages1E Star Trek Customizable Card Game - 9 Deep Space 9 RulebookmrtibblesNo ratings yet
- Resenje Testa EngleskiDocument12 pagesResenje Testa EngleskiMaja NedeljkovicNo ratings yet
- Guitar Fretboard WorkbookDocument80 pagesGuitar Fretboard WorkbookCarlson SiuNo ratings yet
- Jewell Hill ResumeDocument2 pagesJewell Hill ResumeJewell HillNo ratings yet
- Tata Sky WikipediaDocument3 pagesTata Sky WikipediaParth MahisuryNo ratings yet
- KB6 RT U1 2 E - With - AnswersDocument2 pagesKB6 RT U1 2 E - With - AnswersPablo Cantero CastellóNo ratings yet
- Presentation On Hawaii: Soumik Dey Anudeep T Sudip Chhetri Rajeev Gunjan Goutam KumarDocument8 pagesPresentation On Hawaii: Soumik Dey Anudeep T Sudip Chhetri Rajeev Gunjan Goutam KumarAnudeep TantravahiNo ratings yet
- NFS2-3030 - NCA-2 - LCM - Upgrade Instructions October 2016Document2 pagesNFS2-3030 - NCA-2 - LCM - Upgrade Instructions October 2016João CustódioNo ratings yet
- Footwear IndustryDocument50 pagesFootwear IndustrySahilNo ratings yet
- Series: "FLUGEL Does Care About PATIENT "Document2 pagesSeries: "FLUGEL Does Care About PATIENT "Mohamed Abd ElrahmanNo ratings yet
- Explanation, Apology, and RantDocument8 pagesExplanation, Apology, and RantAnonymous xV9mg4vPG0No ratings yet
- BA Syllabus Final - 15apr2015 - Revised-1Document61 pagesBA Syllabus Final - 15apr2015 - Revised-1Priyadharshini sRNo ratings yet
- Sony Alpha A1 Press ReleaseDocument7 pagesSony Alpha A1 Press ReleaseNikonRumorsNo ratings yet
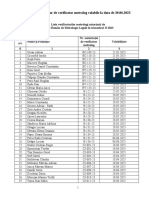
- Lista Verif Metrol Aut Trim II 2023Document25 pagesLista Verif Metrol Aut Trim II 2023Monica GusaNo ratings yet
- Tandem Island Manual - Rev BDocument20 pagesTandem Island Manual - Rev BJesus OrtizNo ratings yet
- Boarding Pass To Toronto - AVIANCADocument2 pagesBoarding Pass To Toronto - AVIANCAALEXNo ratings yet
- Flower Business in NairobiDocument37 pagesFlower Business in NairobiDj Backspin254No ratings yet
- Jesus ChristDocument10 pagesJesus ChristDayron Lopez MendozaNo ratings yet
- American English File 1-Writing and Speaking Questions: The Questions Are The Same As Speaking PartDocument6 pagesAmerican English File 1-Writing and Speaking Questions: The Questions Are The Same As Speaking PartIsmael Shahamat100% (1)
- Bread and PastryDocument4 pagesBread and PastryZarah HonradeNo ratings yet
- Filterstep ManualDocument11 pagesFilterstep Manualmasturbate2308No ratings yet
- Pataks Spring Cookbook 2016Document9 pagesPataks Spring Cookbook 2016bryan micallefNo ratings yet
- English Formative Test 1Document2 pagesEnglish Formative Test 1ima rohimaNo ratings yet
- Ecoworld London The Claves Trentham House BrochureDocument43 pagesEcoworld London The Claves Trentham House BrochureMona MadyNo ratings yet
- Tour Guiding-2d&1n 1Document4 pagesTour Guiding-2d&1n 1Lorielyn Arnaiz CaringalNo ratings yet