You might also like
- Learning From Observations: Section 1 - 3Document26 pagesLearning From Observations: Section 1 - 3chakravarthyashokNo ratings yet
- Machine Learning LearningDocument35 pagesMachine Learning LearningNagendra KumarNo ratings yet
- ML-02-Concept Linear Regression 100822Document53 pagesML-02-Concept Linear Regression 100822Being IITianNo ratings yet
- HIT3002: Introduction To Artificial Intelligence: Learning From ObservationsDocument13 pagesHIT3002: Introduction To Artificial Intelligence: Learning From ObservationsHuan NguyenNo ratings yet
- 15 Wk7 Decision Tree ILPDocument44 pages15 Wk7 Decision Tree ILPB2No ratings yet
- UNIT1Document82 pagesUNIT1Singareddy VivekanandareddyNo ratings yet
- Chapter 8: Learning: By, Safa HamdareDocument46 pagesChapter 8: Learning: By, Safa HamdareDivya ShettyNo ratings yet
- MODULE3_PPTDocument132 pagesMODULE3_PPTIflaNo ratings yet
- 21CS54_AIML_MODULE3_PPT.pptxDocument102 pages21CS54_AIML_MODULE3_PPT.pptxsneha s PatelNo ratings yet
- ML Lecture 1 IitgDocument32 pagesML Lecture 1 IitgUtkarsh BhalodeNo ratings yet
- Machine Learning: Consistent and Complete H., The Space Is Restricted byDocument20 pagesMachine Learning: Consistent and Complete H., The Space Is Restricted byganapathy2010svNo ratings yet
- Learning Theory EssentialsDocument44 pagesLearning Theory EssentialsShreyansh KothariNo ratings yet
- Concept Learning and The General-To-Specific Ordering2Document19 pagesConcept Learning and The General-To-Specific Ordering2fsshidiqNo ratings yet
- CH2 ConceptLearningDocument38 pagesCH2 ConceptLearningraneemraneem1209No ratings yet
- Chapter 2 Concept LearningDocument36 pagesChapter 2 Concept LearningKenneth Kibet NgenoNo ratings yet
- Language Theory and AutomataDocument13 pagesLanguage Theory and AutomataHanae MacintoshNo ratings yet
- Fuzzy System: Soft ComputingDocument17 pagesFuzzy System: Soft ComputingAdidtya Perdana Eva RinantyNo ratings yet
- Module 3Document15 pagesModule 3Ann BombitaNo ratings yet
- AI&ML Module 3Document63 pagesAI&ML Module 3Its MeNo ratings yet
- Lesson 3 Problem Solving ReasoningDocument6 pagesLesson 3 Problem Solving ReasoningABM-Parasan Fharniza D.No ratings yet
- 2IL50 Data Structures: 2018-19 Q3 Lecture 1: IntroductionDocument61 pages2IL50 Data Structures: 2018-19 Q3 Lecture 1: IntroductionJhonNo ratings yet
- Lec13 ML IntroDocument27 pagesLec13 ML IntrocmcdaNo ratings yet
- Fuzzylogic 180304090247Document98 pagesFuzzylogic 180304090247opwekkiNo ratings yet
- 01 Introduction ADocument50 pages01 Introduction ADuy Hùng ĐàoNo ratings yet
- Ai LearningDocument25 pagesAi LearningGi jiNo ratings yet
- ML Co4 Session 32 SomDocument13 pagesML Co4 Session 32 SomShylandra BhanuNo ratings yet
- Naïve Bayes ClassifierDocument39 pagesNaïve Bayes ClassifierDhanraj KumarNo ratings yet
- Learning: Book: Artificial Intelligence, A Modern Approach (Russell & Norvig)Document22 pagesLearning: Book: Artificial Intelligence, A Modern Approach (Russell & Norvig)Mustefa MohammedNo ratings yet
- 15-780: Graduate Artificial Intelligence: Decision TreesDocument41 pages15-780: Graduate Artificial Intelligence: Decision Treesyagagaj137 comNo ratings yet
- Chapter 4Document25 pagesChapter 4aisyahazaliNo ratings yet
- Fuzzy Logic IntroductionDocument8 pagesFuzzy Logic IntroductionapurvbjpNo ratings yet
- Fuzzy LogicDocument95 pagesFuzzy LogicRohitRajNo ratings yet
- Module 3 Problem Solving and ReasoningDocument16 pagesModule 3 Problem Solving and ReasoningRafa LandayanNo ratings yet
- TutorialDocument81 pagesTutorialMoncif MohamedNo ratings yet
- Mathematical ReasoningDocument12 pagesMathematical ReasoningNakanjala PetrusNo ratings yet
- Machine Learning (ML) RIME-832: Dr. Hasan SajidDocument57 pagesMachine Learning (ML) RIME-832: Dr. Hasan SajidMuhammad SalmanNo ratings yet
- Unit 1.3 Concept Hypothses, Inductive BiasDocument31 pagesUnit 1.3 Concept Hypothses, Inductive BiasMCA Department - AIMS InstitutesNo ratings yet
- Thinking 7Document35 pagesThinking 7samirNo ratings yet
- Mathematics in The Modern WorldDocument38 pagesMathematics in The Modern WorldArt Norte TolentinoNo ratings yet
- One Sample Hypothesis Test and Confidence Interval For A Population Mean! BOOK: Chapter 5 Pages 95-99Document29 pagesOne Sample Hypothesis Test and Confidence Interval For A Population Mean! BOOK: Chapter 5 Pages 95-99DIEGO TORRESNo ratings yet
- Chap 18Document51 pagesChap 18Ahmed HussainNo ratings yet
- Module 3 - AIMLDocument134 pagesModule 3 - AIMLharinisk32No ratings yet
- MMW Problem Solving and ReasoningDocument10 pagesMMW Problem Solving and ReasoningVince Luigi ZepedaNo ratings yet
- Logic Programming ExplainedDocument55 pagesLogic Programming ExplainedUmeshNo ratings yet
- chapter19_4eDocument67 pageschapter19_4eAnas HamdanNo ratings yet
- More Logic - Semantic Networks and FramesDocument21 pagesMore Logic - Semantic Networks and Framesluckyme246No ratings yet
- Logicprogramming With Propositional and PredicateDocument55 pagesLogicprogramming With Propositional and Predicateprathyush kruthiventiNo ratings yet
- AI Lecture 12Document49 pagesAI Lecture 12Khalid MahmoodNo ratings yet
- Aiml Lab Exp 1 (Find S)Document24 pagesAiml Lab Exp 1 (Find S)priyanka tataNo ratings yet
- ML Unit 2Document66 pagesML Unit 2sanju.25qtNo ratings yet
- Module 3 - MMW - Problem Solving and ReasoningDocument81 pagesModule 3 - MMW - Problem Solving and Reasoningjhoy fowler100% (1)
- Lecture # 2 Logical ThinkingDocument14 pagesLecture # 2 Logical ThinkingTaduvai Satvik GuptaNo ratings yet
- Machine Learning IntroductionDocument56 pagesMachine Learning IntroductionSri Mukhesh ChowdaryNo ratings yet
- Aug Lesson Plan.Document6 pagesAug Lesson Plan.Shaun ThembaNo ratings yet
- Hypothesis Space and Inductive Bias _ Inductive Bias _ Inductive learning _ Underfitting and OverfittingDocument4 pagesHypothesis Space and Inductive Bias _ Inductive Bias _ Inductive learning _ Underfitting and Overfittingthegodhimself05No ratings yet
- 02 Conceptlearning - PrinterDocument41 pages02 Conceptlearning - PrinterVikalp Ku GuptaNo ratings yet
- Lab 2: Clairaut's Theorem: Xy YxDocument2 pagesLab 2: Clairaut's Theorem: Xy Yxsuvendu beheraNo ratings yet
- Lecture 09 Problem Solving and AnalysisDocument17 pagesLecture 09 Problem Solving and AnalysisMugunth Narayanan.R.BNo ratings yet
- AQA Psychology BRILLIANT MODEL ANSWERS: Attachments: AS and A-levelFrom EverandAQA Psychology BRILLIANT MODEL ANSWERS: Attachments: AS and A-levelNo ratings yet
- "Leadership Does Not Always Wear The Harness of Compromise." - Woodrow WilsonDocument3 pages"Leadership Does Not Always Wear The Harness of Compromise." - Woodrow WilsonAmbreen Zaineb/Lecturer BKR/Economics and BANo ratings yet
- Detroit Cathedral Program Final 4-17-12Document2 pagesDetroit Cathedral Program Final 4-17-12Darryl BradleyNo ratings yet
- Darius Registration Form 201 1623 2nd Semester A.Y. 2021 2022Document1 pageDarius Registration Form 201 1623 2nd Semester A.Y. 2021 2022Kristilla Anonuevo CardonaNo ratings yet
- Excel Case Study 1 - DA - Questions With Key AnswersDocument56 pagesExcel Case Study 1 - DA - Questions With Key AnswersVipin AntilNo ratings yet
- Soal Bing XiDocument9 pagesSoal Bing XiRhya GomangNo ratings yet
- EngM6 TB WebDocument161 pagesEngM6 TB WebNong BillNo ratings yet
- Purposive Communication: Republic of The Philippines Province of Ilocos Sur Ilocos Sur Community College Vigan CityDocument7 pagesPurposive Communication: Republic of The Philippines Province of Ilocos Sur Ilocos Sur Community College Vigan CityLes GasparNo ratings yet
- 19 G15 - Polycystic Ovary Syndrome v12.22.2021 1Document3 pages19 G15 - Polycystic Ovary Syndrome v12.22.2021 1decota.sydneyNo ratings yet
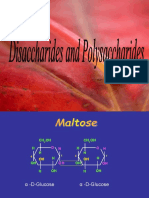
- Disaccharides and PolysaccharidesDocument17 pagesDisaccharides and PolysaccharidesAarthi shreeNo ratings yet
- Determinants of Excessive Screen Time Among Children Under Five Years Old in Selangor, Malaysia: A Cross-Sectional StudyDocument11 pagesDeterminants of Excessive Screen Time Among Children Under Five Years Old in Selangor, Malaysia: A Cross-Sectional StudyEivor LynNo ratings yet
- QuickZChargerZAC DCDocument2 pagesQuickZChargerZAC DCLucaspasNo ratings yet
- SM6 Brochure PDFDocument29 pagesSM6 Brochure PDFkarani ninameNo ratings yet
- Coding and Decoding Practice TestDocument13 pagesCoding and Decoding Practice TestRaja SubramanianNo ratings yet
- Stanford MSE FlowchartDocument1 pageStanford MSE FlowchartJoseyNo ratings yet
- Landmark Church School WBSDocument4 pagesLandmark Church School WBSbayoNo ratings yet
- ECN 202 Final AssignmentDocument10 pagesECN 202 Final AssignmentFarhan Eshraq JeshanNo ratings yet
- Burnelli AircraftDocument51 pagesBurnelli Aircraftretread1100% (3)
- 4.1 Simple Harmonic Motion - WorksheetDocument12 pages4.1 Simple Harmonic Motion - Worksheetkoelia100% (1)
- Public Health Risks of Inadequate Prison HealthcareDocument3 pagesPublic Health Risks of Inadequate Prison HealthcarerickahrensNo ratings yet
- Narration KIPS Academy (Free Download)Document17 pagesNarration KIPS Academy (Free Download)AyshahNo ratings yet
- Cazul Cyril Burt 3Document3 pagesCazul Cyril Burt 3Cosmina MihaelaNo ratings yet
- Dental Materials Store2 PDFDocument20 pagesDental Materials Store2 PDFMalaz MemoNo ratings yet
- D117/D118 Service ManualDocument75 pagesD117/D118 Service ManualJohn JuquenNo ratings yet
- HR Interview QuestionsDocument6 pagesHR Interview QuestionsnavneetjadonNo ratings yet
- Faith Surah RefutationDocument9 pagesFaith Surah RefutationKhairul Anuar Mohd IsaNo ratings yet
- Idebenone Increases Chance of StabilizationrecoverDocument5 pagesIdebenone Increases Chance of StabilizationrecoverRaluca PascalauNo ratings yet
- Overcoming ChallengesDocument28 pagesOvercoming ChallengesDeutsche Mark CuynoNo ratings yet
- CPG Prevention, Diagnosis & Management of IE PDFDocument182 pagesCPG Prevention, Diagnosis & Management of IE PDFsigitNo ratings yet
- ROM Laboratory v1.00Document548 pagesROM Laboratory v1.00Carlos Reaper Jaque OlivaresNo ratings yet
- Verification and Validation in Computational SimulationDocument42 pagesVerification and Validation in Computational SimulationazminalNo ratings yet