You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- AI Lecture on Neural Networks and PerceptronsDocument28 pagesAI Lecture on Neural Networks and PerceptronsHàssáñ YàsèéñNo ratings yet
- Neural Network Lec 2 by DR Waheed FinalDocument22 pagesNeural Network Lec 2 by DR Waheed FinalWaheed AnwarNo ratings yet
- Chapter 07 Artificial Neural NetworkDocument62 pagesChapter 07 Artificial Neural NetworkRijesh ShresthaNo ratings yet
- 28 Lecture CSC462Document28 pages28 Lecture CSC462Sarmad RehanNo ratings yet
- Neural Networks - An Introduction: Slide 1Document51 pagesNeural Networks - An Introduction: Slide 1ManlNo ratings yet
- NN 2Document42 pagesNN 2Ku LotNo ratings yet
- AI Machine Learning Neural Networks & Genetic AlgorithmsDocument71 pagesAI Machine Learning Neural Networks & Genetic Algorithmserjaimin89No ratings yet
- Artificial Neural Networks: System That Can Acquire, Store, and Utilize Experiential KnowledgeDocument40 pagesArtificial Neural Networks: System That Can Acquire, Store, and Utilize Experiential KnowledgeKiran Moy Mandal100% (1)
- Pattern Classification Neural Networks: Abdelmoniem Bayoumi, PHDDocument22 pagesPattern Classification Neural Networks: Abdelmoniem Bayoumi, PHDMostafa MohamedNo ratings yet
- ML Lecture#4Document109 pagesML Lecture#4muhammadhzrizwan2002No ratings yet
- Learning With Linear Neurons: Adapted From Lectures by Geoffrey Hinton and Others Updated by N. Intrator, May 2007Document59 pagesLearning With Linear Neurons: Adapted From Lectures by Geoffrey Hinton and Others Updated by N. Intrator, May 2007Mohammad Al SamhouriNo ratings yet
- Perceptron Linear ClassifiersDocument42 pagesPerceptron Linear ClassifiersHimanshu SaxenaNo ratings yet
- Business Intelligence & Data Mining-10Document39 pagesBusiness Intelligence & Data Mining-10binzidd007No ratings yet
- 1 - Single Layer Perceptron ANN SDocument40 pages1 - Single Layer Perceptron ANN SDumidu GhanasekaraNo ratings yet
- Model of Neuron in An ANNDocument12 pagesModel of Neuron in An ANNpolinati.vinesh2023No ratings yet
- Part7.2 Artificial Neural NetworksDocument51 pagesPart7.2 Artificial Neural NetworksHarris Punki MwangiNo ratings yet
- NN Part1Document43 pagesNN Part1L. Kh. HovhannisyanNo ratings yet
- Week 06 Lecture MaterialDocument46 pagesWeek 06 Lecture MaterialMeer HassanNo ratings yet
- OmNarayanSingh CC306 IS FinalDocument15 pagesOmNarayanSingh CC306 IS FinalOm SinghNo ratings yet
- Neural Net 3rdclassDocument35 pagesNeural Net 3rdclassUttam SatapathyNo ratings yet
- Soft ComputingDocument92 pagesSoft ComputingEco Frnd Nikhil ChNo ratings yet
- 7 CS1AC16 Simple Neural NetworkDocument3 pages7 CS1AC16 Simple Neural NetworkAnna AbcxyzNo ratings yet
- Neural NetworksDocument42 pagesNeural NetworksTharun RaajNo ratings yet
- 5 AnnDocument103 pages5 AnnZaeem AbbasNo ratings yet
- Artificial Neural NetworksDocument75 pagesArtificial Neural Networksgoflux pwnsNo ratings yet
- CS423 Data Warehousing and Data Mining: Dr. Hammad AfzalDocument67 pagesCS423 Data Warehousing and Data Mining: Dr. Hammad AfzalZafar IqbalNo ratings yet
- Lec1 Inroduction To Neural NetworkDocument23 pagesLec1 Inroduction To Neural NetworkNermeen ElsheikhNo ratings yet
- ANN TITLEDocument61 pagesANN TITLENikhil Kumar sarwgiNo ratings yet
- Percept RonDocument53 pagesPercept RonFarhan AuliaNo ratings yet
- Neural NetworkDocument66 pagesNeural NetworkDwi SuciNo ratings yet
- Competitive Learning ExtendedDocument35 pagesCompetitive Learning ExtendedSannan AhmedNo ratings yet
- McCulloch-Pitts NeuronDocument14 pagesMcCulloch-Pitts NeuronRajib DebnathNo ratings yet
- Abstract Models and Neural Learning RulesDocument31 pagesAbstract Models and Neural Learning Ruleshari pukhaNo ratings yet
- AI-Lecture 12 - Simple PerceptronDocument24 pagesAI-Lecture 12 - Simple PerceptronMadiha Nasrullah100% (1)
- Linear Separability and Perceptron Learning in Neural NetworksDocument18 pagesLinear Separability and Perceptron Learning in Neural NetworksshardapatelNo ratings yet
- Random Variables: Petter Mostad 2005.09.19Document24 pagesRandom Variables: Petter Mostad 2005.09.19liteepanNo ratings yet
- Single Layer Feedforward NetworksDocument21 pagesSingle Layer Feedforward NetworksAKSHIT MATHUR 15BEC0582No ratings yet
- Presentation On: Neural NetworkDocument30 pagesPresentation On: Neural NetworkMuhanad Al-khalisyNo ratings yet
- MachineLearning Part5Document77 pagesMachineLearning Part5Raj ChauhanNo ratings yet
- Introduction To Neural Networks: Revision Lectures: © John A. Bullinaria, 2004Document24 pagesIntroduction To Neural Networks: Revision Lectures: © John A. Bullinaria, 2004basela2010No ratings yet
- Artificial Neural NetworksDocument31 pagesArtificial Neural NetworksSandra Martínez CastroNo ratings yet
- Adaline and KDocument29 pagesAdaline and KBHAVNA AGARWAL0% (1)
- BoolDocument33 pagesBoolAnonymous eWMnRr70qNo ratings yet
- ECE/CS 559 - Neural Networks Lecture Notes #4 The Perceptron and Its TrainingDocument12 pagesECE/CS 559 - Neural Networks Lecture Notes #4 The Perceptron and Its TrainingNihal Pratap GhanatheNo ratings yet
- Neuro Fuzzy - Session 1Document21 pagesNeuro Fuzzy - Session 1Rohit Kumar SinghNo ratings yet
- Supervised Learning Networks: Perceptron and BackpropagationDocument22 pagesSupervised Learning Networks: Perceptron and BackpropagationmohitNo ratings yet
- Artificial Neural Networks: System That Can Acquire, Store, and Utilize Experiential KnowledgeDocument43 pagesArtificial Neural Networks: System That Can Acquire, Store, and Utilize Experiential KnowledgeUtkarsh AgarwalNo ratings yet
- Pattern Association NetworksDocument89 pagesPattern Association NetworksSarin C. R EeeNo ratings yet
- Artificial Neural NetworksDocument54 pagesArtificial Neural NetworksSabin ThapaNo ratings yet
- Neuron ModelDocument8 pagesNeuron Modelعبد السلام حسينNo ratings yet
- 3-Differential Circuit AmplifiersDocument13 pages3-Differential Circuit AmplifiersPrince KratosNo ratings yet
- Feed Forward Neural Networks ExplainedDocument48 pagesFeed Forward Neural Networks ExplainedmaherkamelNo ratings yet
- Networks of Artificial Neurons, Single Layer PerceptronsDocument18 pagesNetworks of Artificial Neurons, Single Layer Perceptronsعيدروس قاسمNo ratings yet
- ECE/CS 559 - Neural Networks Lecture Notes #8: Associative Memory and Hopfield NetworksDocument9 pagesECE/CS 559 - Neural Networks Lecture Notes #8: Associative Memory and Hopfield NetworksNihal Pratap GhanatheNo ratings yet
- Introduction To Neural Networks: John Paxton Montana State University Summer 2003Document31 pagesIntroduction To Neural Networks: John Paxton Montana State University Summer 2003Muhanad Al-khalisyNo ratings yet
- Unit - I Artificial Neural NetworksDocument23 pagesUnit - I Artificial Neural NetworksMary MorseNo ratings yet
- EEO 401 Note Set 4Document8 pagesEEO 401 Note Set 4The great PNo ratings yet
- Chapter2 - Intro To ANNs PDFDocument10 pagesChapter2 - Intro To ANNs PDFHassan AliNo ratings yet
- Chapter 2 Concept LearningDocument36 pagesChapter 2 Concept LearningKenneth Kibet NgenoNo ratings yet
- BIT-Group 6 WorkDocument31 pagesBIT-Group 6 WorkKenneth Kibet NgenoNo ratings yet
- Chapter 9 - Project Planning - Communication ManagementDocument6 pagesChapter 9 - Project Planning - Communication ManagementMWAURA KARURINo ratings yet
- Chapter 5 - Project Planning - Cost ManagementDocument7 pagesChapter 5 - Project Planning - Cost ManagementSuada Bőw WéěžýNo ratings yet
- L9 E-Commerce TrendsDocument10 pagesL9 E-Commerce TrendsKenneth Kibet NgenoNo ratings yet
- 10.1515 - Eng 2021 0105Document7 pages10.1515 - Eng 2021 0105Mohd Shahrom IsmailNo ratings yet
- Advanced Math Physics Lab Matrix Algebra ProblemsDocument4 pagesAdvanced Math Physics Lab Matrix Algebra ProblemsShashank KNo ratings yet
- Vix112 Vmrun Command PDFDocument20 pagesVix112 Vmrun Command PDFtrix337No ratings yet
- UntitledDocument64 pagesUntitledCHANDAN CHANDUNo ratings yet
- N Is The Smallest Positive Integer That Has 7 Factors. Quantity ADocument10 pagesN Is The Smallest Positive Integer That Has 7 Factors. Quantity ATeja SreeNo ratings yet
- Tabla RH 3RHDocument1 pageTabla RH 3RHJhon SuarezNo ratings yet
- FRP 1543494499564 - Grating Brochure - 2018Document6 pagesFRP 1543494499564 - Grating Brochure - 2018Ganesh KumarNo ratings yet
- Brosur L-Gutter TJMDocument4 pagesBrosur L-Gutter TJMPandu HarisurawanNo ratings yet
- UMC 100 ManualDocument162 pagesUMC 100 ManualJunioCaetanoNo ratings yet
- What Is PNR: Passenger Name Record Explained in Details - AltexSoftDocument1 pageWhat Is PNR: Passenger Name Record Explained in Details - AltexSoftKwan K.No ratings yet
- Bharat Petroleum: Star PEB India Private LimitedDocument10 pagesBharat Petroleum: Star PEB India Private LimitedParvinder Kaur100% (1)
- Instructor Manual For Financial & Managerial Accounting 16th (Sixteenth) Edition by Jan R. Williams, Sue F. Haka, Mark S. Bettner, Joseph V. CarcelloDocument7 pagesInstructor Manual For Financial & Managerial Accounting 16th (Sixteenth) Edition by Jan R. Williams, Sue F. Haka, Mark S. Bettner, Joseph V. CarcelloJonathonChavezbcsj100% (15)
- Hotel Property Management System SRSDocument17 pagesHotel Property Management System SRSUmair HassanNo ratings yet
- PHD Thesis On Robotics Matlab CodeDocument7 pagesPHD Thesis On Robotics Matlab Codeprdezlief100% (2)
- Mobile: 6303779851: CH - VasaviDocument2 pagesMobile: 6303779851: CH - VasaviOmprakashNo ratings yet
- Anypoint Platform Development: Fundamentals (Mule 4) Setup RequirementsDocument3 pagesAnypoint Platform Development: Fundamentals (Mule 4) Setup RequirementsKakz KarthikNo ratings yet
- WP Fantom v1.6Document50 pagesWP Fantom v1.6benfpierceNo ratings yet
- Fire Hazard QuizDocument1 pageFire Hazard QuizAna GreorNo ratings yet
- Lec 5 Use Case ModellingDocument37 pagesLec 5 Use Case ModellingMoeen KhanNo ratings yet
- JSW Casting EquipDocument23 pagesJSW Casting EquipArnab GhoshNo ratings yet
- Marine Charging Power Supply InstructionsDocument13 pagesMarine Charging Power Supply InstructionsClarence ClarNo ratings yet
- D0117 RB XEO Service ManualDocument217 pagesD0117 RB XEO Service ManualYuriko MartinezNo ratings yet
- Intro to Software Quality Assurance (SQADocument30 pagesIntro to Software Quality Assurance (SQAMarneil Allen SanchezNo ratings yet
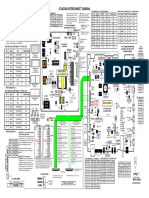
- 47LM7600 INTERCONNECT DIAGRAM P201 "SMPS Board" To P2400 "MAIN BoardDocument1 page47LM7600 INTERCONNECT DIAGRAM P201 "SMPS Board" To P2400 "MAIN Boardruben mapaloNo ratings yet
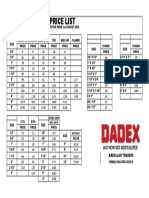
- Dadex Efast Price List 1ST August 2020Document1 pageDadex Efast Price List 1ST August 2020Jugno ShahNo ratings yet
- Test Plan and DocumentsDocument4 pagesTest Plan and DocumentsvimudhiNo ratings yet
- PoN Servcie Container - WARTSILADocument5 pagesPoN Servcie Container - WARTSILAIgnacio BartchNo ratings yet
- Non-Linear Optimization TechniquesDocument58 pagesNon-Linear Optimization TechniquesmanankNo ratings yet
- Magazine: Mcneel'S FL Ying CircusDocument36 pagesMagazine: Mcneel'S FL Ying CircusNoureddine SemaraNo ratings yet
- Domestic BER Technical Bulletin July 2020Document33 pagesDomestic BER Technical Bulletin July 2020Denis DillaneNo ratings yet