You might also like
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesFrom EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesRating: 4.5 out of 5 stars4.5/5 (7)
- Legislation Register - ExampleDocument10 pagesLegislation Register - ExampleKingsley AhanonuNo ratings yet
- Activity 2: in and Out Objective:: Table 1. Volcano Model and SlopeDocument2 pagesActivity 2: in and Out Objective:: Table 1. Volcano Model and Slopeaurie minnieNo ratings yet
- The Analysis of Beams & Frames: Iii) Beams and Frames Subjected To Shear Force, Bending Moment and Axial ForcesDocument73 pagesThe Analysis of Beams & Frames: Iii) Beams and Frames Subjected To Shear Force, Bending Moment and Axial Forcessohail ahmedNo ratings yet
- Alstom GL312 - CB - May Cat 110kVDocument19 pagesAlstom GL312 - CB - May Cat 110kVDuy Sơn67% (3)
- 7 - Stiffness Method For Frame3333Document43 pages7 - Stiffness Method For Frame3333Anonymous yrcU1kNo ratings yet
- Cable ElementDocument4 pagesCable Elementmidastutorials2023No ratings yet
- Lecture 3 Elements BC Loading Materials UpdatedDocument107 pagesLecture 3 Elements BC Loading Materials UpdatedHaytham AlmaghariNo ratings yet
- Advanced Finite Element Beams Theory & CalculationsDocument20 pagesAdvanced Finite Element Beams Theory & CalculationsNathaji ShelkeNo ratings yet
- Statement: Solution:: Problem 2-9Document1 pageStatement: Solution:: Problem 2-9GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Modeling A Beam (I) Analysis With Pro/Mechanica StructureDocument55 pagesModeling A Beam (I) Analysis With Pro/Mechanica StructureakinojohnkennedyNo ratings yet
- Statement:: PROBLEM 2-34Document1 pageStatement:: PROBLEM 2-34GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Finite Element Method: Beam AnalysisDocument10 pagesFinite Element Method: Beam AnalysisZaffira RahmanNo ratings yet
- Statement: Solution:: PROBLEM 2-21Document3 pagesStatement: Solution:: PROBLEM 2-21GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Structural Analysis CE 309Document7 pagesStructural Analysis CE 309Y SAHITHNo ratings yet
- 電路ch13b Magnetically Coupled Circuits 2Document38 pages電路ch13b Magnetically Coupled Circuits 2luoaier1016No ratings yet
- Statement:: Problem 2-1Document2 pagesStatement:: Problem 2-1GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: Problem 2-1Document2 pagesStatement:: Problem 2-1Gustavo CopplaNo ratings yet
- Lecture 6 - Plane GridsDocument11 pagesLecture 6 - Plane GridsJordan Empensando OliverosNo ratings yet
- Visio-DS DRIVER ABB TYPE UEMC50Document1 pageVisio-DS DRIVER ABB TYPE UEMC50jjhenNo ratings yet
- Zadatak: Formirati Globalnu Matricu Krutosti Prikazanog Okvira Vektor Nepoznatih PomjeranjaDocument4 pagesZadatak: Formirati Globalnu Matricu Krutosti Prikazanog Okvira Vektor Nepoznatih Pomjeranjaemina_hNo ratings yet
- SACE Emax 2: Doc. N.° 1SDH001400R0903 - L9769Document18 pagesSACE Emax 2: Doc. N.° 1SDH001400R0903 - L9769Hisham MostafaNo ratings yet
- A3 - Intro To FEM3 - Truss - ReviewDocument44 pagesA3 - Intro To FEM3 - Truss - ReviewNiño Cochise SarcenoNo ratings yet
- n1 MATRIX ANALYSISDocument28 pagesn1 MATRIX ANALYSISarjungireesh789No ratings yet
- SPH3U Formula Sheet Fall 2020 1 PDFDocument2 pagesSPH3U Formula Sheet Fall 2020 1 PDFUzmaNo ratings yet
- Microsoft Word - MA3004 - Tutorial 4 (FEM) Solutions - AY2022-23Document12 pagesMicrosoft Word - MA3004 - Tutorial 4 (FEM) Solutions - AY2022-23Luna OpalNo ratings yet
- Statement: Solution:: Problem 2-7Document2 pagesStatement: Solution:: Problem 2-7GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-30Document1 pageStatement:: PROBLEM 2-30GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- MCEN4008 Finite Element Analysis Review: General Steps For Solving An FEA ProblemDocument4 pagesMCEN4008 Finite Element Analysis Review: General Steps For Solving An FEA ProblemChensong DongNo ratings yet
- A3 - Intro To FEM3 - Truss - MainDocument87 pagesA3 - Intro To FEM3 - Truss - MainNiño Cochise SarcenoNo ratings yet
- Chap4 Lec2Document16 pagesChap4 Lec2Boshra BharNo ratings yet
- BEAM (Element Load) 1Document15 pagesBEAM (Element Load) 1JAYSON BANTAYANNo ratings yet
- 2.assignent - 2 SolutionDocument9 pages2.assignent - 2 SolutionDawit AmharaNo ratings yet
- Chapter 2 FormulaDocument1 pageChapter 2 FormulaNORWADIAH BINTI MOHD ANDAI (POLIMELAKA)No ratings yet
- Tugas Kanan Kiri PDFDocument2 pagesTugas Kanan Kiri PDFChusnul HidayatNo ratings yet
- Statement:: PROBLEM 2-56Document1 pageStatement:: PROBLEM 2-56GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Tugas Kanan KiriDocument2 pagesTugas Kanan KiriChusnul HidayatNo ratings yet
- Lect11 - Stiffness Method 2 - TrussDocument16 pagesLect11 - Stiffness Method 2 - TrussTszwun CheungNo ratings yet
- T FF R 1 2 F FF 33,000 FF V HP : Case Study of Power Transmission - Group 4 MemberDocument4 pagesT FF R 1 2 F FF 33,000 FF V HP : Case Study of Power Transmission - Group 4 MemberHải Hoàng LýNo ratings yet
- Problems On Simple Stress (Lec 4b) PDFDocument26 pagesProblems On Simple Stress (Lec 4b) PDFErrol NovencidoNo ratings yet
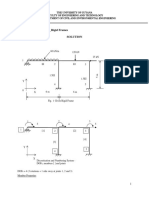
- Rigid Frame Example4 SolutionDocument5 pagesRigid Frame Example4 SolutionMark Sage PercivalNo ratings yet
- Statement:: PROBLEM 2-14Document1 pageStatement:: PROBLEM 2-14GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Homework 1 SolutionDocument5 pagesHomework 1 SolutionMrinmoy SahaNo ratings yet
- ARM Based ESD UNIT 2BDocument18 pagesARM Based ESD UNIT 2BManu ManuNo ratings yet
- Final Round 08 Version SDocument8 pagesFinal Round 08 Version Ssunmeetnaik08No ratings yet
- Lesson No. 3 System ModellingDocument44 pagesLesson No. 3 System ModellingJorge BautistaNo ratings yet
- Lect10 - Stiffness Method 1 - BeamDocument29 pagesLect10 - Stiffness Method 1 - BeamTszwun CheungNo ratings yet
- Experiment 12Document2 pagesExperiment 12Prajwal Gautam100% (1)
- Part - I (Physics) : MGH I MV I MVDocument10 pagesPart - I (Physics) : MGH I MV I MVpankajNo ratings yet
- Transformer On LoadDocument14 pagesTransformer On Loadrajatxavier4u100% (1)
- Cbse Test Paper-02 CLASS - XI PHYSICS (Physical World & Measurement) Topic: - Physical World & Measurement (ANSWERS)Document3 pagesCbse Test Paper-02 CLASS - XI PHYSICS (Physical World & Measurement) Topic: - Physical World & Measurement (ANSWERS)anon_204662609No ratings yet
- UntitledDocument4 pagesUntitledHarbowoNo ratings yet
- FBV 2Document1 pageFBV 2pgltuNo ratings yet
- Lecture 3: 2-D Truss, Computer Based SolutionDocument13 pagesLecture 3: 2-D Truss, Computer Based SolutionJordan Empensando OliverosNo ratings yet
- Dynamics Lecture No 14Document32 pagesDynamics Lecture No 14G Gfr YMaNo ratings yet
- Tugas Kanan Kiri BARUDocument2 pagesTugas Kanan Kiri BARUChusnul HidayatNo ratings yet
- SI 3211 - Lecture 11Document141 pagesSI 3211 - Lecture 11hafizhfNo ratings yet
- Elastically Coupled Beam Apparatus: Instructional ManualDocument9 pagesElastically Coupled Beam Apparatus: Instructional ManualMr. Danish SaeedNo ratings yet
- Statement: Solution:: Problem 2-8Document4 pagesStatement: Solution:: Problem 2-8Dio ChanNo ratings yet
- P (KG) P (N)Document14 pagesP (KG) P (N)JOHNNo ratings yet
- Ellipse ExamplesDocument3 pagesEllipse ExamplesKirbyUSA TorresNo ratings yet
- Bars and Beams FEM Linear Static AnalysisDocument28 pagesBars and Beams FEM Linear Static Analysissir867413140No ratings yet
- Sarmila3Document79 pagesSarmila3ujjwalsingh8509No ratings yet
- Design of Steel Structures (Backlog) Civl 3201 - 2022Document4 pagesDesign of Steel Structures (Backlog) Civl 3201 - 2022ujjwalsingh8509No ratings yet
- 161636798not5 27 03 2024Document6 pages161636798not5 27 03 2024ujjwalsingh8509No ratings yet
- Bending Moment DigramDocument5 pagesBending Moment Digramujjwalsingh8509No ratings yet
- Wa0039.Document6 pagesWa0039.ujjwalsingh8509No ratings yet
- 3D DigramDocument1 page3D Digramujjwalsingh8509No ratings yet
- Day - 6.1Document4 pagesDay - 6.1ujjwalsingh8509No ratings yet
- Day3 Problem1 StaadDocument5 pagesDay3 Problem1 Staadujjwalsingh8509No ratings yet
- Stiffness & FlexibilityDocument41 pagesStiffness & Flexibilityujjwalsingh8509No ratings yet
- Introduction Matrix MethodDocument8 pagesIntroduction Matrix Methodujjwalsingh8509No ratings yet
- 4 Stiffness Matrix Method System ApproachDocument26 pages4 Stiffness Matrix Method System Approachujjwalsingh8509No ratings yet
- Springer Reassessing European Impressions of Indian AstronomyDocument7 pagesSpringer Reassessing European Impressions of Indian AstronomyAnkur KakkarNo ratings yet
- FTIR 7800: SpectrophotometerDocument8 pagesFTIR 7800: SpectrophotometerAfzal SarfarazNo ratings yet
- Physical Science SHS Lesson 14.4 Models of The UniverseDocument23 pagesPhysical Science SHS Lesson 14.4 Models of The UniverseJoy DolorosaNo ratings yet
- Hilite Hotel AnswerDocument6 pagesHilite Hotel AnswerDanishNo ratings yet
- Notes & Notes: Biostatistics & EBMDocument35 pagesNotes & Notes: Biostatistics & EBMamhhospital0No ratings yet
- What Is History: E. Kent RogersDocument27 pagesWhat Is History: E. Kent RogersAnnalyn EndrinalNo ratings yet
- 09 Runtime-ScriptingDocument11 pages09 Runtime-ScriptingEngenheiro AmoedoNo ratings yet
- Experiment No. 1 - AnthropometryDocument8 pagesExperiment No. 1 - AnthropometryBai MustaphaNo ratings yet
- Modeling in Gnu Mathprog Language - A Short Introduction: Paweł Zieli NskiDocument38 pagesModeling in Gnu Mathprog Language - A Short Introduction: Paweł Zieli NskiSeptimus PierreNo ratings yet
- UNIT 3 - Journal EntryDocument5 pagesUNIT 3 - Journal EntrySOFI ULLISKYNo ratings yet
- East Asian ArtDocument4 pagesEast Asian ArtMenchie PaynorNo ratings yet
- Energy Tech - 2016 - WesterhoffDocument11 pagesEnergy Tech - 2016 - WesterhoffMario CastilloNo ratings yet
- What Marijuana Does To The Teenage BrainDocument2 pagesWhat Marijuana Does To The Teenage BrainAdriana MirandaNo ratings yet
- Biology by Carvan SSEDocument112 pagesBiology by Carvan SSETayyaba SaeedNo ratings yet
- Eed210 Long-Term Lesson Planning - Wild CatsDocument6 pagesEed210 Long-Term Lesson Planning - Wild Catsapi-281285714No ratings yet
- Compabloc 207-235Document248 pagesCompabloc 207-235Anie EkpenyongNo ratings yet
- The Educational DebateDocument2 pagesThe Educational DebateMarisela Tabares0% (1)
- Kema Three Core Power Cables - 1Document38 pagesKema Three Core Power Cables - 1Thinh Tien NguyenNo ratings yet
- Theoretical Computer Science: Yi Hong, Jiandong Liu, Deying Li, Chuanwen Luo, Mengjie ChangDocument11 pagesTheoretical Computer Science: Yi Hong, Jiandong Liu, Deying Li, Chuanwen Luo, Mengjie ChangDinda AisyNo ratings yet
- Gecolea, ME143-2 Sample QuestionsDocument25 pagesGecolea, ME143-2 Sample QuestionsJazztine Andrei GecoleaNo ratings yet
- Krauss - Photography's Discursive Spaces - Landscape-View - 1982Document10 pagesKrauss - Photography's Discursive Spaces - Landscape-View - 1982Noam GonnenNo ratings yet
- 1625330538330Document3 pages1625330538330kossi abaloNo ratings yet
- Modeling and Structural Numerical Analysis of A Cylindrical Pressure Vessel Using The Standard ASME PCC-2-2008Document8 pagesModeling and Structural Numerical Analysis of A Cylindrical Pressure Vessel Using The Standard ASME PCC-2-2008rashid kNo ratings yet
- This Is The New TitleDocument7 pagesThis Is The New TitleMUSÑGI MICAELA LEIGH SUZONNo ratings yet
- Jit Guide - First AidDocument8 pagesJit Guide - First AidPaul MorpheuNo ratings yet
- Volumen 4Document7 pagesVolumen 4Willians MariscalNo ratings yet
- Cambridge IGCSE (9-1) : Physics 0972/12Document20 pagesCambridge IGCSE (9-1) : Physics 0972/12Tristan GrahamNo ratings yet
- SYM Starter U04 OSEWorksheetDocument4 pagesSYM Starter U04 OSEWorksheetCarolinaNo ratings yet