You might also like
- Sr. No. Key Computer Architecture Computer OrganizationDocument11 pagesSr. No. Key Computer Architecture Computer OrganizationKashif ZamanNo ratings yet
- Instruction Set ArchitectureDocument4 pagesInstruction Set ArchitectureashuNo ratings yet
- Cisc RiscDocument4 pagesCisc RiscRohini JosephNo ratings yet
- Difference Between RISC and CISC ArchitectureDocument2 pagesDifference Between RISC and CISC ArchitectureakssahaNo ratings yet
- Risc A Cisc PDocument10 pagesRisc A Cisc PAlexander KirosNo ratings yet
- MM Assignment 1 AnsDocument18 pagesMM Assignment 1 Ansys013330No ratings yet
- Unit 4 - Microcontroller & Embedded System - WWW - Rgpvnotes.inDocument6 pagesUnit 4 - Microcontroller & Embedded System - WWW - Rgpvnotes.inDEFENCE MOTIVATIONNo ratings yet
- Advanced Computer Architecture 1 1Document118 pagesAdvanced Computer Architecture 1 1SharathMenonNo ratings yet
- (Computer Architecture CIA-3) : (By: Nikhil Kumar Yadav) (Roll. No.: 1847241) (Date of Submission: 06-09-2019)Document8 pages(Computer Architecture CIA-3) : (By: Nikhil Kumar Yadav) (Roll. No.: 1847241) (Date of Submission: 06-09-2019)NIKHIL KUMAR YADAV 1847241No ratings yet
- Binder 1Document46 pagesBinder 1Hemalatha K.N.No ratings yet
- MCES-21CS43 Module-1 NotesDocument14 pagesMCES-21CS43 Module-1 NotesEdu techNo ratings yet
- Von Neumann Architecture vs. HarvardDocument22 pagesVon Neumann Architecture vs. Harvardkaleab seleshiNo ratings yet
- 5-Harvard Architecture - CISC & RISC Architectures-10!01!2024Document18 pages5-Harvard Architecture - CISC & RISC Architectures-10!01!2024shashank.reddy5804No ratings yet
- Task 5Document3 pagesTask 5Fajri RahmanNo ratings yet
- Lecture 18 - RICS and CISC PropertiesDocument8 pagesLecture 18 - RICS and CISC PropertiesPragya SinghNo ratings yet
- Mod5 1Document18 pagesMod5 1welcome to my worldNo ratings yet
- Structure of Computer SystemsDocument16 pagesStructure of Computer SystemsMussie KebedeNo ratings yet
- CAO Unit IIIDocument29 pagesCAO Unit IIIshivaniNo ratings yet
- Module1 3-Ias Risc CiscDocument19 pagesModule1 3-Ias Risc CiscCharan ChowdaryNo ratings yet
- ISA ModelsDocument5 pagesISA ModelsFahad Tanveer MalikNo ratings yet
- Fundamentals of Microcontroller & Its Application: Unit-IDocument19 pagesFundamentals of Microcontroller & Its Application: Unit-IRajan PatelNo ratings yet
- Jan Marie Veatrice M. Pacia 4-ECE: What Are Cisc and Risc Architecture? How Do They Differ From Each Other?Document6 pagesJan Marie Veatrice M. Pacia 4-ECE: What Are Cisc and Risc Architecture? How Do They Differ From Each Other?Jan Marie Veatrice PaciaNo ratings yet
- Computer Architecture Unit-II by Khalid Amin AkhoonDocument19 pagesComputer Architecture Unit-II by Khalid Amin AkhoonNikita SabaleNo ratings yet
- Unit 5 (Coa) NotesDocument35 pagesUnit 5 (Coa) NotesmudiyalaruchithaNo ratings yet
- Computer System Organizations: Ms - Chit Su MonDocument74 pagesComputer System Organizations: Ms - Chit Su MonAjharuddin AnsariNo ratings yet
- Risc CiscDocument1 pageRisc CiscabhiNo ratings yet
- Assign3 EE222Document6 pagesAssign3 EE222Obed AhmadNo ratings yet
- Computer Architecture Lesson 2 (Instruction Set Architecture)Document9 pagesComputer Architecture Lesson 2 (Instruction Set Architecture)ghassanNo ratings yet
- MPMC (Unit 01) Part 02Document39 pagesMPMC (Unit 01) Part 02bovas.biju2021No ratings yet
- Module 1Document12 pagesModule 1PrathameshNo ratings yet
- Computer Arcitecture Assignment: Risc-Reduced Instruction Set ComputerDocument5 pagesComputer Arcitecture Assignment: Risc-Reduced Instruction Set ComputerantoNo ratings yet
- Co Assignment - 1Document4 pagesCo Assignment - 1IgrisNo ratings yet
- Difference Between Von Neumann and Harvard ArchitectureDocument6 pagesDifference Between Von Neumann and Harvard ArchitectureSuraj KhatalNo ratings yet
- Complex Instruction Set ComputerDocument17 pagesComplex Instruction Set ComputerkangkanpaulNo ratings yet
- RiscDocument9 pagesRiscsweetyshorty2769No ratings yet
- SUUMEDH KALNAWAT - 2017110026 Sukruth Ramesh - 2017110056 SWAPNIL KHANDEKAR - 2017110027 PRATHAMESH DALVI - 2017110011 Lance Fernandes - 2017110015Document12 pagesSUUMEDH KALNAWAT - 2017110026 Sukruth Ramesh - 2017110056 SWAPNIL KHANDEKAR - 2017110027 PRATHAMESH DALVI - 2017110011 Lance Fernandes - 2017110015SUKRUTH RAMESHNo ratings yet
- RiscDocument1 pageRiscSreekrishna DasNo ratings yet
- Risc and Cisc: By: Farheen Masood Sania ShahzadDocument17 pagesRisc and Cisc: By: Farheen Masood Sania ShahzadAlia BashirNo ratings yet
- $RS2V09GDocument12 pages$RS2V09GKUMUD KESARNo ratings yet
- UNIT-1 Introduction To MicrocontrollersDocument8 pagesUNIT-1 Introduction To MicrocontrollerssupriyaNo ratings yet
- 03 Cisc RiscDocument37 pages03 Cisc RiscahmedNo ratings yet
- Session2 - Introduction To RISC and CISCDocument4 pagesSession2 - Introduction To RISC and CISCHillary MurungaNo ratings yet
- RISC and CISC - Eugene ClewlowDocument17 pagesRISC and CISC - Eugene Clewlowilg1No ratings yet
- Risc and Cisc: by Eugene ClewlowDocument17 pagesRisc and Cisc: by Eugene ClewlowRamnath PraveenNo ratings yet
- Computer Architect AssignmentDocument2 pagesComputer Architect AssignmentINAMNo ratings yet
- Risc and Cisc: by Eugene ClewlowDocument17 pagesRisc and Cisc: by Eugene ClewlowSampathhhhh Sai TadepalliNo ratings yet
- Discussing Instruction Set ArchitectureDocument10 pagesDiscussing Instruction Set ArchitecturemorganceaserNo ratings yet
- Reduced Instruction Set Computer 1 PDFDocument6 pagesReduced Instruction Set Computer 1 PDFKunal PawarNo ratings yet
- Risc and Cisc: Computer ArchitectureDocument17 pagesRisc and Cisc: Computer Architecturedress dressNo ratings yet
- Risc and Cisc CasestudyDocument5 pagesRisc and Cisc CasestudyJAy ShahNo ratings yet
- CA Lecture 10 1Document5 pagesCA Lecture 10 1kalimNo ratings yet
- Computer Instr SetDocument13 pagesComputer Instr SetHari_Vee_7383No ratings yet
- The Simplest Way To Examine The Advantages and Disadvantages of RISC Architecture Is by Contrasting It With ItDocument11 pagesThe Simplest Way To Examine The Advantages and Disadvantages of RISC Architecture Is by Contrasting It With ItsaadawarNo ratings yet
- Cisc Vs RiscDocument3 pagesCisc Vs RiscGeorgiana DanilaNo ratings yet
- Risc Vs Cisc 2 1424454141105114Document12 pagesRisc Vs Cisc 2 1424454141105114Sam RockvilleNo ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- "Unleashing the Power of Assembly Language: Mastering the World's Most Efficient Code"From Everand"Unleashing the Power of Assembly Language: Mastering the World's Most Efficient Code"No ratings yet
- Open-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsFrom EverandOpen-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsRating: 3 out of 5 stars3/5 (1)
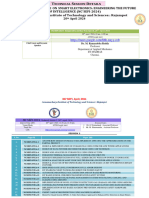
- Upadated - Technical Sessions Schedule NC-2024-1Document7 pagesUpadated - Technical Sessions Schedule NC-2024-1palaji pradeepNo ratings yet
- Upadated - Technical Sessions Schedule NC-2024-1Document7 pagesUpadated - Technical Sessions Schedule NC-2024-1palaji pradeepNo ratings yet
- ES Unit-5Document67 pagesES Unit-5palaji pradeepNo ratings yet
- ES Unit-4Document34 pagesES Unit-4palaji pradeepNo ratings yet
- Present Perfect PrezentacijaDocument17 pagesPresent Perfect PrezentacijaTakym0No ratings yet
- Bibliography Edu2141005Document5 pagesBibliography Edu2141005api-564736435No ratings yet
- Sang,: The Ethnography of Norih Indian Folk OperaDocument23 pagesSang,: The Ethnography of Norih Indian Folk OperaRajpreja10No ratings yet
- Software Requirements Specification ForDocument12 pagesSoftware Requirements Specification ForzaianbNo ratings yet
- Post Test Practice Test CDocument8 pagesPost Test Practice Test Cafriska chandra0% (1)
- Lit Analysis 2 - ManilaDocument6 pagesLit Analysis 2 - ManilaPatrick Nuguid100% (1)
- Cambridge Vocabulary For IELTS Unit 5Document9 pagesCambridge Vocabulary For IELTS Unit 5Minh Chanh Nguyen100% (2)
- Furuno NX700 Service Manual (SME-56490-A3) PDFDocument144 pagesFuruno NX700 Service Manual (SME-56490-A3) PDFmrservice7782No ratings yet
- Git CommandsDocument10 pagesGit CommandsbanuNo ratings yet
- Lesson Plan in Mathematics 10Document3 pagesLesson Plan in Mathematics 10marie padolNo ratings yet
- Python GUI: Meher Krishna PatelDocument41 pagesPython GUI: Meher Krishna PatelPablo Antonio Ortega LuceroNo ratings yet
- Piaget's Theory of Cognitive Development by Dr. Waleed KhanDocument19 pagesPiaget's Theory of Cognitive Development by Dr. Waleed KhanNaseem SaharNo ratings yet
- Expanding Your Third Register: OvertonesDocument2 pagesExpanding Your Third Register: OvertonesAndrew CobbNo ratings yet
- Zoom #13: Commerce Unethical Fashion Passive Voice: Past, Present, Future - QuestionsDocument13 pagesZoom #13: Commerce Unethical Fashion Passive Voice: Past, Present, Future - QuestionsRosario LópezNo ratings yet
- UNIT-2 Prepared by Sathish Kumar/MitDocument16 pagesUNIT-2 Prepared by Sathish Kumar/MitAnbazhagan Selvanathan0% (1)
- The Tale of The Man of Lawe 1000059498 PDFDocument340 pagesThe Tale of The Man of Lawe 1000059498 PDFjurebieNo ratings yet
- hw6 SolDocument11 pageshw6 SolAbdallah RedaNo ratings yet
- Quick Reference Sheet SCSA 1Document8 pagesQuick Reference Sheet SCSA 1Aamir MalikNo ratings yet
- Bioinformatics Lab: Introduction To Command Line Computing With Cyverse/Iplant Using The Tuxedo Pipeline For Rna-Seq (Lab 1) Introduction To UnixDocument35 pagesBioinformatics Lab: Introduction To Command Line Computing With Cyverse/Iplant Using The Tuxedo Pipeline For Rna-Seq (Lab 1) Introduction To UnixTiago AndradeNo ratings yet
- Unit 2 - Answer Key PDFDocument2 pagesUnit 2 - Answer Key PDFJanet Fernandez0% (2)
- Yct 1Document3 pagesYct 1teryNo ratings yet
- PragmatismDocument36 pagesPragmatismtasneemNo ratings yet
- L4 Making GeneralizationsDocument17 pagesL4 Making GeneralizationsJonalyn MempinNo ratings yet
- ErroresDocument6 pagesErroresBernard Surita PlacenciaNo ratings yet
- Series 0i-D (E) - V05aDocument16 pagesSeries 0i-D (E) - V05aPaulus PramudiNo ratings yet
- D108650GC10 - sg1 Oracle Database 19c PLSQL Workshop Vol 1Document478 pagesD108650GC10 - sg1 Oracle Database 19c PLSQL Workshop Vol 1johnroberts135490% (10)
- Critical Thinking and Critical PedagogyDocument28 pagesCritical Thinking and Critical PedagogySohail AkhtarNo ratings yet
- TranStation Users ManualDocument84 pagesTranStation Users ManualKeidy Brito100% (1)
- IT Practice QuestionsDocument3 pagesIT Practice QuestionsAli RangwalaNo ratings yet
- Mitsubishi Forklift Fb18tca Service ManualDocument23 pagesMitsubishi Forklift Fb18tca Service Manualcatherinewade170701kty100% (118)