You might also like
- DSP and Multicore ProcessorsDocument12 pagesDSP and Multicore Processorsvvsulakhe6337No ratings yet
- Ch2. Core of Embedded SystemsDocument15 pagesCh2. Core of Embedded SystemsnikhilpawanikarNo ratings yet
- Chapter 21Document28 pagesChapter 21vishal_16278No ratings yet
- As Old GrowDocument14 pagesAs Old GrowTemesgenNo ratings yet
- UNIT-IVDocument72 pagesUNIT-IVfishatsion09No ratings yet
- CH 2Document59 pagesCH 2gcrossnNo ratings yet
- Embedded Systems Unit 2Document78 pagesEmbedded Systems Unit 2ravibabukancharlaNo ratings yet
- Binder 1Document46 pagesBinder 1Hemalatha K.N.No ratings yet
- MICROPROCESSORSDocument10 pagesMICROPROCESSORSKELVIN MUTHININo ratings yet
- Embedded and Real-Time Operating Systems: Course Code: 70439Document76 pagesEmbedded and Real-Time Operating Systems: Course Code: 70439SrikanthNo ratings yet
- MCES-21CS43 Module-1 NotesDocument14 pagesMCES-21CS43 Module-1 NotesEdu techNo ratings yet
- Syit Es CH2Document24 pagesSyit Es CH2truptiNo ratings yet
- MPMC (Unit 01) Part 02Document39 pagesMPMC (Unit 01) Part 02bovas.biju2021No ratings yet
- COA Lecture 9 Risc Cisc Piplining Concepts PDFDocument33 pagesCOA Lecture 9 Risc Cisc Piplining Concepts PDFA3 AashuNo ratings yet
- CISC Is An Acronym For Complex Instruction Set ComputerDocument44 pagesCISC Is An Acronym For Complex Instruction Set ComputerVantharAlaNo ratings yet
- ARM Micro Controller Differences Between Microprocessor and MicrocontrollerDocument18 pagesARM Micro Controller Differences Between Microprocessor and Microcontrollersrc e-solutionsNo ratings yet
- Unit 1: 1.1 Microprocessors and MicrocontrollersDocument13 pagesUnit 1: 1.1 Microprocessors and Microcontrollerssachin tupeNo ratings yet
- MicroprocessorsDocument25 pagesMicroprocessorsKarneshwar SannamaniNo ratings yet
- Embedded SystemsDocument143 pagesEmbedded SystemsRajesh RmsNo ratings yet
- MOD1MCESDocument4 pagesMOD1MCESanandita chalamalasettiNo ratings yet
- Unit 4 - Microcontroller & Embedded System - WWW - Rgpvnotes.inDocument6 pagesUnit 4 - Microcontroller & Embedded System - WWW - Rgpvnotes.inDEFENCE MOTIVATIONNo ratings yet
- Chapter 1: Introduction: 1.1 What Is A Microprocessor?Document69 pagesChapter 1: Introduction: 1.1 What Is A Microprocessor?Niran SafarNo ratings yet
- Unit 2 - Learning MaterailDocument52 pagesUnit 2 - Learning MaterailPILLARISETTY KARTHIK 2021-CSE UGNo ratings yet
- McesDocument14 pagesMcesBhuvan MhNo ratings yet
- microprocessor_8085&86Document38 pagesmicroprocessor_8085&86anil gaurNo ratings yet
- Lecture 18 - RICS and CISC PropertiesDocument8 pagesLecture 18 - RICS and CISC PropertiesPragya SinghNo ratings yet
- On Chip Periperals tm4c UNIT-IIDocument30 pagesOn Chip Periperals tm4c UNIT-IIK JahnaviNo ratings yet
- 20201221-Complete Notes MCADocument96 pages20201221-Complete Notes MCADanish UllahNo ratings yet
- Module - 1: 1.1 Microprocessors V/S MicrocontrollersDocument10 pagesModule - 1: 1.1 Microprocessors V/S MicrocontrollersPushpa Latha100% (1)
- Fundamentals of Microcontroller & Its Application: Unit-IDocument19 pagesFundamentals of Microcontroller & Its Application: Unit-IRajan PatelNo ratings yet
- Microprocessor: A Short Guide To Written Exam MicroprocessorDocument16 pagesMicroprocessor: A Short Guide To Written Exam MicroprocessorSakib Muhaimin100% (1)
- Difference Between Von Neumann and Harvard ArchitectureDocument6 pagesDifference Between Von Neumann and Harvard ArchitectureSuraj KhatalNo ratings yet
- Microprocessor Technology-1Document183 pagesMicroprocessor Technology-1Genes GastoNo ratings yet
- Jan Marie Veatrice M. Pacia 4-ECE: What Are Cisc and Risc Architecture? How Do They Differ From Each Other?Document6 pagesJan Marie Veatrice M. Pacia 4-ECE: What Are Cisc and Risc Architecture? How Do They Differ From Each Other?Jan Marie Veatrice PaciaNo ratings yet
- Computer OrganizationDocument5 pagesComputer OrganizationSARFRAZNo ratings yet
- Microprocessors and MicrocontrollersDocument280 pagesMicroprocessors and MicrocontrollersJustin Angelo SildoraNo ratings yet
- RiscDocument9 pagesRiscsweetyshorty2769No ratings yet
- Unit 2 MPMC NotesDocument37 pagesUnit 2 MPMC NotesRohit Venkat PawanNo ratings yet
- Microprocessor - Overview: How Does A Microprocessor Work?Document8 pagesMicroprocessor - Overview: How Does A Microprocessor Work?vedavyas99No ratings yet
- Esdmodule 2Document2 pagesEsdmodule 2Heaven varghese C S C SNo ratings yet
- Lesson10 Registers - VonnNewmanArch 2Document13 pagesLesson10 Registers - VonnNewmanArch 2Cuadra Marzel louisNo ratings yet
- Processors, Parallel Processing and Virtual MachinesDocument12 pagesProcessors, Parallel Processing and Virtual MachinesSaloni ThapaNo ratings yet
- Lecture 2 - Typical Embedded SystemDocument5 pagesLecture 2 - Typical Embedded SystemrhodonelduatinNo ratings yet
- Unit 1B Typical Emb SysDocument52 pagesUnit 1B Typical Emb SysNandan BallaNo ratings yet
- Microprocessor and InterfaceDocument16 pagesMicroprocessor and InterfaceMajid MehmoodNo ratings yet
- Assignment 1 SolutionDocument4 pagesAssignment 1 SolutionVirang PatelNo ratings yet
- Micro-Controller Basics 1: Nasif MDocument24 pagesMicro-Controller Basics 1: Nasif MMd.Rakibul IslamNo ratings yet
- Advanced Low Power RISC Processor Design Using MIPS Instruction SetDocument7 pagesAdvanced Low Power RISC Processor Design Using MIPS Instruction SetRyan CookNo ratings yet
- Lesson10 RegistersDocument10 pagesLesson10 RegistersLloyd RevesNo ratings yet
- Module 3 CoaDocument17 pagesModule 3 CoaGourab DashNo ratings yet
- Advanced computer architecture overviewDocument118 pagesAdvanced computer architecture overviewSharathMenonNo ratings yet
- Introduction MicroControllerDocument12 pagesIntroduction MicroControllerAbhijeet ShekharNo ratings yet
- processor classificationDocument4 pagesprocessor classificationFredrick MugoNo ratings yet
- VLIW architecture explained in detailDocument6 pagesVLIW architecture explained in detailAabha KadamNo ratings yet
- ES Unit-2Document28 pagesES Unit-2palaji pradeepNo ratings yet
- NARAYANA ENGINEERING COLLEGE EMBEDDED SYSTEMS NOTESDocument17 pagesNARAYANA ENGINEERING COLLEGE EMBEDDED SYSTEMS NOTESDurgadeviNo ratings yet
- Microcontroller Inside My PhoneDocument18 pagesMicrocontroller Inside My PhoneSwapnadeep KapuriNo ratings yet
- ARM ArchitectureDocument16 pagesARM ArchitectureS S0% (1)
- Instruction Set ArchitectureDocument4 pagesInstruction Set ArchitectureashuNo ratings yet
- Rtos PDFDocument12 pagesRtos PDFPrathameshNo ratings yet
- Memory NotesDocument7 pagesMemory NotesPrathameshNo ratings yet
- Module 1 - Part2Document6 pagesModule 1 - Part2PrathameshNo ratings yet
- Module 5 Transport Layer and Network SecurityDocument20 pagesModule 5 Transport Layer and Network SecurityPrathameshNo ratings yet
- Module 4 Application Layer OverviewDocument18 pagesModule 4 Application Layer OverviewPrathameshNo ratings yet
- Fame TechnologiesDocument144 pagesFame TechnologiesYoheswaran GnanavelNo ratings yet
- Cisco Intersight HandbookDocument409 pagesCisco Intersight HandbookHsueh KevinNo ratings yet
- Practice Quiz - Deploying Applications - Coursera PDFDocument1 pagePractice Quiz - Deploying Applications - Coursera PDFjuhireddyNo ratings yet
- Asterisk NowDocument82 pagesAsterisk Nowkambojk100% (1)
- HR Service Delivery ReadinessDocument15 pagesHR Service Delivery ReadinessNoorNo ratings yet
- DatalineDocument1 pageDatalineJoel TellezNo ratings yet
- La Flaca - Jarabe de Palo (Drums Only) - Piano TutorialDocument1 pageLa Flaca - Jarabe de Palo (Drums Only) - Piano TutorialLaura Martínez CasorránNo ratings yet
- BRKARC 2001 Cisco ASR1000 Series Routers System Solution Architectures 2013 Orlando 2 Hours PDFDocument115 pagesBRKARC 2001 Cisco ASR1000 Series Routers System Solution Architectures 2013 Orlando 2 Hours PDFSaptarshi BhattacharjeeNo ratings yet
- Introduction to Nanotechnology Seminar ReportDocument13 pagesIntroduction to Nanotechnology Seminar Reportyogesh sharmaNo ratings yet
- Teac H300 Dab TunerDocument24 pagesTeac H300 Dab TunerKate KnightNo ratings yet
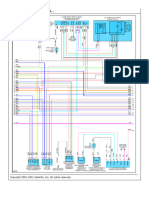
- Engine Controls Hybrid System Circuit D2Document1 pageEngine Controls Hybrid System Circuit D2FranciscoNo ratings yet
- Data File - 01Document939 pagesData File - 01Dhruvil DesaiNo ratings yet
- Nptel Gis CeDocument1 pageNptel Gis Cekkeyan8080No ratings yet
- Unique Cable Condition Assessment SystemDocument2 pagesUnique Cable Condition Assessment SystemNaseemNo ratings yet
- The Design and Implementation of A Computer Based Testing System Using Component-Based Software EngineeringDocument8 pagesThe Design and Implementation of A Computer Based Testing System Using Component-Based Software EngineeringSalis KhanNo ratings yet
- Apple TimelineDocument1 pageApple Timelinekunwar.avneeshNo ratings yet
- Prequlification of ContractorDocument15 pagesPrequlification of ContractorMansoor AliNo ratings yet
- JSP: Overview of lifecycle, architecture, elements, implicit objects and exception handlingDocument73 pagesJSP: Overview of lifecycle, architecture, elements, implicit objects and exception handlingRushikesh YadavNo ratings yet
- Krell K-300i SellsheetDocument2 pagesKrell K-300i SellsheetMilan TrengovskiNo ratings yet
- How To Submit To D2LDocument1 pageHow To Submit To D2LArtem GovorovNo ratings yet
- Draft SemestralWorK Aircraft2Document7 pagesDraft SemestralWorK Aircraft2Filip SkultetyNo ratings yet
- Liebert NPS-IDocument38 pagesLiebert NPS-IMahesh KumbharNo ratings yet
- Fasteners For Use With PC BoardsDocument25 pagesFasteners For Use With PC BoardsJustin PhanNo ratings yet
- EZET ACADEMY ROUTE TO PROFESSIONAL ENGINEER (Ir.) DEVELOPMENT PACKAGEDocument8 pagesEZET ACADEMY ROUTE TO PROFESSIONAL ENGINEER (Ir.) DEVELOPMENT PACKAGEkesavan1990No ratings yet
- Product Manual For Line Operated Three Phase A.C. Motors (Ie Code) "Efficiency Classes and Performance Specification" ACCORDING TO IS 12615:2018Document8 pagesProduct Manual For Line Operated Three Phase A.C. Motors (Ie Code) "Efficiency Classes and Performance Specification" ACCORDING TO IS 12615:2018Arun ArumugamNo ratings yet
- M650. User Manual. 2009, Carmanah Technologies Corporation. Revised June - M650 - UserManual - RevADocument76 pagesM650. User Manual. 2009, Carmanah Technologies Corporation. Revised June - M650 - UserManual - RevAPaul PerazaNo ratings yet
- Design Solar SystemDocument11 pagesDesign Solar Systemjames ramNo ratings yet
- Presenting ServiceNow DataDocument76 pagesPresenting ServiceNow DataGiriprasad GunalanNo ratings yet
- Construction - Scaffold Checklist - HSEDocument6 pagesConstruction - Scaffold Checklist - HSEroldskiNo ratings yet
- Collimator Instruction Manuals PDFDocument160 pagesCollimator Instruction Manuals PDFNauman100% (1)