You might also like
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Unit Iii General Purpose Processor Software DevelopmentDocument11 pagesUnit Iii General Purpose Processor Software DevelopmentSaritha ReddyNo ratings yet
- HenzonzzzzDocument5 pagesHenzonzzzzapi-548516280No ratings yet
- Core Components of Embedded SystemsDocument12 pagesCore Components of Embedded SystemsPrathameshNo ratings yet
- Microcontrollers: An IntroductionDocument10 pagesMicrocontrollers: An IntroductionAjay YANo ratings yet
- Introduction To The 68Hc12 MicrocontrollerDocument28 pagesIntroduction To The 68Hc12 Microcontrollerahetdhaezh100% (2)
- Chapter 1: Introduction: 1.1 What Is A Microprocessor?Document69 pagesChapter 1: Introduction: 1.1 What Is A Microprocessor?Niran SafarNo ratings yet
- Microcontroller&Its Applications 2021 NotesDocument38 pagesMicrocontroller&Its Applications 2021 NotesAnirban MandalNo ratings yet
- CA - 2marksDocument73 pagesCA - 2marksVishal BasugadeNo ratings yet
- CoDocument80 pagesCogdayanand4uNo ratings yet
- Chapter 2. Basic Organization of A ComputerDocument22 pagesChapter 2. Basic Organization of A ComputerBarnabé MbelenNo ratings yet
- Computer Architecture 2 MarksDocument32 pagesComputer Architecture 2 MarksArchanavgs0% (1)
- Digital Electronics & Computer OrganisationDocument17 pagesDigital Electronics & Computer Organisationabhishek125No ratings yet
- CH 2Document59 pagesCH 2gcrossnNo ratings yet
- Embedded Systems Unit 2Document78 pagesEmbedded Systems Unit 2ravibabukancharlaNo ratings yet
- 1.1 Introduction To Embedded Systems:: Vechicle Tracking On Google Maps Using Arduino, Esp8266 & GpsDocument60 pages1.1 Introduction To Embedded Systems:: Vechicle Tracking On Google Maps Using Arduino, Esp8266 & Gpspraneeth saiNo ratings yet
- chapter 2 personal weather stationDocument14 pageschapter 2 personal weather stationBts ArmyNo ratings yet
- 1.3.2 Computer Architecture and The Fetch-Execute CycleDocument4 pages1.3.2 Computer Architecture and The Fetch-Execute CycleZulkarnainNo ratings yet
- 1.3.2 Computer Architecture and The Fetch-Execute Cycle PDFDocument4 pages1.3.2 Computer Architecture and The Fetch-Execute Cycle PDFAhmed HassanNo ratings yet
- EMBEDDED SYSTEM ASSIGNMENT ON PROCESSORS AND COMMUNICATIONDocument30 pagesEMBEDDED SYSTEM ASSIGNMENT ON PROCESSORS AND COMMUNICATIONajas777BNo ratings yet
- Embedded Systems Components Part II: LessonDocument14 pagesEmbedded Systems Components Part II: LessonSayan Kumar KhanNo ratings yet
- RTS Module 2 Part A NotesDocument11 pagesRTS Module 2 Part A NotesVignesh H VNo ratings yet
- RISC vs CISC differencesDocument80 pagesRISC vs CISC differencesAKASH GHOSHNo ratings yet
- New Chapter 1Document18 pagesNew Chapter 1Amzar ShukriNo ratings yet
- COA Module 1 BEC306CDocument24 pagesCOA Module 1 BEC306Csachinksr007No ratings yet
- COA Unit 1Document33 pagesCOA Unit 1Keshav NaganathanNo ratings yet
- Chapter 21Document28 pagesChapter 21vishal_16278No ratings yet
- Computer System Organizations: Ms - Chit Su MonDocument74 pagesComputer System Organizations: Ms - Chit Su MonAjharuddin AnsariNo ratings yet
- COA Mod 1 UpdatedDocument22 pagesCOA Mod 1 UpdatedMirror LeechNo ratings yet
- As Old GrowDocument14 pagesAs Old GrowTemesgenNo ratings yet
- Computer Organization: Virtual MemoryDocument26 pagesComputer Organization: Virtual Memorychuks felix michaelNo ratings yet
- Experience of Teaching Embedded System Design Using Fpgas 1Document10 pagesExperience of Teaching Embedded System Design Using Fpgas 1Tharshninipriya RajasekarNo ratings yet
- UNIT-1 Introduction To MicrocontrollersDocument8 pagesUNIT-1 Introduction To MicrocontrollerssupriyaNo ratings yet
- Architecture of DSP ProcessorsDocument13 pagesArchitecture of DSP ProcessorsSugumar Sar DuraiNo ratings yet
- DOC-20210330-WA0010.Document12 pagesDOC-20210330-WA0010.v5kbkrmdfpNo ratings yet
- Unit 4 - Microcontroller & Embedded System - WWW - Rgpvnotes.inDocument6 pagesUnit 4 - Microcontroller & Embedded System - WWW - Rgpvnotes.inDEFENCE MOTIVATIONNo ratings yet
- Mod 2Document20 pagesMod 2PraneethNo ratings yet
- MicrocontrollersDocument38 pagesMicrocontrollersShashwath kumarNo ratings yet
- Module 1Document86 pagesModule 1whaaat ?No ratings yet
- BATCH-7Document74 pagesBATCH-7kota naikNo ratings yet
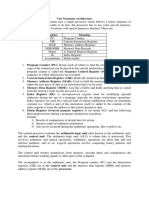
- Von Neumann Architecture ExplainedDocument8 pagesVon Neumann Architecture ExplainedDinesh KumarNo ratings yet
- Introduction - Unit I MCDocument35 pagesIntroduction - Unit I MCKirthi RkNo ratings yet
- 1.1.1. Structure and Function of The ProcessorDocument7 pages1.1.1. Structure and Function of The Processorthenuk.rodrigoNo ratings yet
- Microprocessor 2Document33 pagesMicroprocessor 2Jean de LeonNo ratings yet
- Microprocessor SystemsDocument10 pagesMicroprocessor SystemsShamim OmulangiraNo ratings yet
- Unit 9 Microprocessors: StructureDocument31 pagesUnit 9 Microprocessors: StructureudayNo ratings yet
- MICROPROCESSORSDocument10 pagesMICROPROCESSORSKELVIN MUTHININo ratings yet
- Group 6 Cpu Design PresentationDocument50 pagesGroup 6 Cpu Design PresentationFerry AriNo ratings yet
- BATCH-8Document9 pagesBATCH-8kota naikNo ratings yet
- Lab01 MP PDFDocument11 pagesLab01 MP PDFAlicia KohNo ratings yet
- Lecture 2 Basic CPU ArchitecturesDocument7 pagesLecture 2 Basic CPU ArchitecturesMohan Krishna Reddy KarriNo ratings yet
- 3.0 Central Processing Unit: ITE 1922 - ICT ApplicationsDocument7 pages3.0 Central Processing Unit: ITE 1922 - ICT ApplicationsShine InstituteNo ratings yet
- 1.2 Parts of A DAQ SystemDocument37 pages1.2 Parts of A DAQ SystemMaddipati SumanthNo ratings yet
- Chapter One Introduction & Evolution of MicroprocessorDocument68 pagesChapter One Introduction & Evolution of Microprocessorabel bahiru100% (1)
- Draw The Block Diagram of Simple Microprocessor-Based System and Explain The Function of Each Block (You Can Use MS Word or Google Docs)Document8 pagesDraw The Block Diagram of Simple Microprocessor-Based System and Explain The Function of Each Block (You Can Use MS Word or Google Docs)Riza Pahama MananaongNo ratings yet
- MICROPROCESSOR DESIGNING by UPKARDocument42 pagesMICROPROCESSOR DESIGNING by UPKARUpkar ChauhanNo ratings yet
- Coa CT 1 QBDocument43 pagesCoa CT 1 QBNilesh bibhutiNo ratings yet
- Lecture 2 - Typical Embedded SystemDocument5 pagesLecture 2 - Typical Embedded SystemrhodonelduatinNo ratings yet
- Flex SensorDocument51 pagesFlex SensorPooja BanNo ratings yet
- Module 1Document18 pagesModule 1Rohit AnejaNo ratings yet
- What Are Chemical Reactions L-1Document11 pagesWhat Are Chemical Reactions L-1Heaven varghese C S C SNo ratings yet
- Lesson - 3 Periodic TableDocument19 pagesLesson - 3 Periodic TableHeaven varghese C S C SNo ratings yet
- Yr8 L-1 SpeedDocument15 pagesYr8 L-1 SpeedHeaven varghese C S C SNo ratings yet
- Unit2 Slides Computing Systems Y8Document33 pagesUnit2 Slides Computing Systems Y8Heaven varghese C S C SNo ratings yet
- Yr8 L-2 DragDocument12 pagesYr8 L-2 DragHeaven varghese C S C SNo ratings yet
- IJRTE Paper TemplateDocument4 pagesIJRTE Paper TemplateHeaven varghese C S C SNo ratings yet
- Types of Reaction Power Point L-2Document18 pagesTypes of Reaction Power Point L-2Heaven varghese C S C SNo ratings yet
- L1 Chemical or Physical Change L 3Document19 pagesL1 Chemical or Physical Change L 3Heaven varghese C S C SNo ratings yet
- 2 NDDocument22 pages2 NDHeaven varghese C S C SNo ratings yet
- IJECE-Paper FormatDocument3 pagesIJECE-Paper FormatHeaven varghese C S C SNo ratings yet
- Human SerumDocument9 pagesHuman SerumHeaven varghese C S C SNo ratings yet
- ConferenceDocument6 pagesConferenceHeaven varghese C S C SNo ratings yet
- 10 1109@jsen 2020 3004568Document8 pages10 1109@jsen 2020 3004568Heaven varghese C S C SNo ratings yet
- Lara Cueva2019Document4 pagesLara Cueva2019Heaven varghese C S C SNo ratings yet
- SoC Mod2 NotesDocument64 pagesSoC Mod2 NotesHeaven varghese C S C SNo ratings yet
- Tung 2019Document5 pagesTung 2019Heaven varghese C S C SNo ratings yet
- REPORTDocument3 pagesREPORTHeaven varghese C S C SNo ratings yet
- Mod3 Full - Copy.23Document24 pagesMod3 Full - Copy.23Heaven varghese C S C SNo ratings yet
- Approx. Compressors for Error-Resilient Multiplier DesignDocument4 pagesApprox. Compressors for Error-Resilient Multiplier DesignHeaven varghese C S C SNo ratings yet
- Assigment 2Document7 pagesAssigment 2Heaven varghese C S C SNo ratings yet
- Microwave 1st SeriesDocument16 pagesMicrowave 1st SeriesHeaven varghese C S C SNo ratings yet
- Microwave 3,4Document37 pagesMicrowave 3,4Heaven varghese C S C SNo ratings yet
- 4 THDocument16 pages4 THHeaven varghese C S C SNo ratings yet
- New Doc 2019-12-08 18.22.43Document10 pagesNew Doc 2019-12-08 18.22.43Heaven varghese C S C SNo ratings yet
- OverView VirtualRealityinMedicine JVWRDocument37 pagesOverView VirtualRealityinMedicine JVWRHeaven varghese C S C SNo ratings yet
- New Doc 2019-12-08 18.17.22Document13 pagesNew Doc 2019-12-08 18.17.22Heaven varghese C S C SNo ratings yet
- MicroC2 eCh11L06UseExampleTrafficLightsSystemDocument28 pagesMicroC2 eCh11L06UseExampleTrafficLightsSystemHeaven varghese C S C SNo ratings yet
- Revised MTB Class 4 Book 1Document112 pagesRevised MTB Class 4 Book 1Heaven varghese C S C SNo ratings yet
- Traffic LightDocument13 pagesTraffic LightHeaven varghese C S C SNo ratings yet
- CM650WDocument96 pagesCM650WLeandro NicolasNo ratings yet
- Dc6Cautp4P3X: Product Data SheetDocument3 pagesDc6Cautp4P3X: Product Data SheetSamastha Nair SamajamNo ratings yet
- NTP8230 IcpdfDocument55 pagesNTP8230 IcpdfAldy PutraprasetiyoNo ratings yet
- XD400 4v2 MANDocument20 pagesXD400 4v2 MANDanilo GamarrosNo ratings yet
- Modicon x80 I Os Bmxddi3202kDocument4 pagesModicon x80 I Os Bmxddi3202kISLAMIC LECTURESNo ratings yet
- Vestel 17ips19-5pDocument4 pagesVestel 17ips19-5pMihai MikeNo ratings yet
- Powers of 2 Table - Vaughn's SummariesDocument2 pagesPowers of 2 Table - Vaughn's SummariesAnonymous NEqv0Uy7KNo ratings yet
- 24T Adder PDFDocument4 pages24T Adder PDFJatinKumarNo ratings yet
- Sony kdl-22cx520 kdl-32cx520 cx523 kdl-40cx520 523 Chassis Az2g SM PDFDocument98 pagesSony kdl-22cx520 kdl-32cx520 cx523 kdl-40cx520 523 Chassis Az2g SM PDFBoKi PoKiNo ratings yet
- 73 Magazine 1968 10 OctoberDocument132 pages73 Magazine 1968 10 Octoberrodolfo ProkopovichNo ratings yet
- SSP2N60B/SSS2N60B: 600V N-Channel MOSFETDocument11 pagesSSP2N60B/SSS2N60B: 600V N-Channel MOSFETCuenta ParaNo ratings yet
- Ghprobe ManualDocument99 pagesGhprobe Manualdemos70100% (1)
- Schmitt TriggerDocument11 pagesSchmitt TriggerSwapnali JadhavNo ratings yet
- On Grid/Grid Tie SolutionsDocument1 pageOn Grid/Grid Tie SolutionsSaravanramanKoNo ratings yet
- EC6502 Principles of Digital Signal ProcessingDocument320 pagesEC6502 Principles of Digital Signal ProcessinglazezijoNo ratings yet
- StudentStudyGuide V012Document69 pagesStudentStudyGuide V012Rhutuja AmbatkarNo ratings yet
- List of RF and IF components for Anthropic DSA815 spectrum analyzerDocument2 pagesList of RF and IF components for Anthropic DSA815 spectrum analyzerInam Ur RehmanNo ratings yet
- LED Light Project: Components, Concepts & Circuit for ArduinoDocument6 pagesLED Light Project: Components, Concepts & Circuit for ArduinoDarwin VargasNo ratings yet
- GSA Chipset Report November 2018Document14 pagesGSA Chipset Report November 2018Muhammad Jamil AwanNo ratings yet
- Datasheet IT8512E F V0.4.1Document335 pagesDatasheet IT8512E F V0.4.1Krzysztof BondkaNo ratings yet
- Duty909-1-Phase - SI1S - CompleteDocument26 pagesDuty909-1-Phase - SI1S - Completevignesh kNo ratings yet
- Experiment No 6 Ce NPNDocument4 pagesExperiment No 6 Ce NPNEugene Christina EuniceNo ratings yet
- LM4001 THRU LM4007: FeaturesDocument2 pagesLM4001 THRU LM4007: FeaturesSetyo RiniNo ratings yet
- Denon-S32!52!52DAB Wireless Music SysDocument102 pagesDenon-S32!52!52DAB Wireless Music SyscesarlcaNo ratings yet
- Fujitsu Esprimo X923 Desktop PC: Data SheetDocument8 pagesFujitsu Esprimo X923 Desktop PC: Data Sheetconmar5mNo ratings yet
- Huawei Optimizador 450W PDocument1 pageHuawei Optimizador 450W Pakspe22mamNo ratings yet
- Products t1 Brochure TrioDocument8 pagesProducts t1 Brochure TrioAhmed El-ShafeiNo ratings yet
- 8086 Microprocessor TrainersDocument5 pages8086 Microprocessor TrainersMarija KalendarNo ratings yet
- PCB Guidlines: Acronics Systems, IncDocument19 pagesPCB Guidlines: Acronics Systems, IncOri ONNo ratings yet
- File Information: Drive Information: Torque/Force Foldback InformationDocument2 pagesFile Information: Drive Information: Torque/Force Foldback InformationprajwalNo ratings yet