You might also like
- Redlands' 2015 California Public Records RequestsDocument26 pagesRedlands' 2015 California Public Records RequestsBeau Yarbrough100% (1)
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Calculus by Feliciano UyDocument83 pagesCalculus by Feliciano UyAndreana Amor76% (21)
- Integral and Differential Calculus by Feliciano PDFDocument83 pagesIntegral and Differential Calculus by Feliciano PDFJosha Caronan100% (1)
- Graha YuddhaDocument10 pagesGraha YuddhaHeather WilliamsNo ratings yet
- 2005 Sea-Doo 3D RFIDocument124 pages2005 Sea-Doo 3D RFIJessica DziakNo ratings yet
- 01-System Devices Configuration - Rev GDocument36 pages01-System Devices Configuration - Rev GPABITRA PATRANo ratings yet
- The Fundamental Theorem of Calculus and The Poincaré LemmaDocument13 pagesThe Fundamental Theorem of Calculus and The Poincaré LemmasuperscriberNo ratings yet
- Listeria Monocytogenes Guidance On: Environmental Monitoring and Corrective Actions in At-Risk FoodsDocument35 pagesListeria Monocytogenes Guidance On: Environmental Monitoring and Corrective Actions in At-Risk FoodsGaganpreet KaurNo ratings yet
- Test Engleza Clasa A5a Modul 3Document3 pagesTest Engleza Clasa A5a Modul 3Adelina HasasNo ratings yet
- On Fourier Transforms and Delta Functions: 3.1 Basic AnalogiesDocument15 pagesOn Fourier Transforms and Delta Functions: 3.1 Basic AnalogiesDarioLampaNo ratings yet
- DistributionsDocument20 pagesDistributionsahmetyergenulyNo ratings yet
- Application of Differential Equation in Computer ScienceDocument6 pagesApplication of Differential Equation in Computer ScienceUzair Razzaq100% (1)
- Chapter One: Fundamental Concept of TensorsDocument47 pagesChapter One: Fundamental Concept of Tensorsmoon_moz8069No ratings yet
- College and Advanced Algebra Handout # 1 - Chapter 1. FunctionsDocument8 pagesCollege and Advanced Algebra Handout # 1 - Chapter 1. FunctionsMary Jane BugarinNo ratings yet
- 07 InhomogeneousUniverse 2Document55 pages07 InhomogeneousUniverse 2João SenaNo ratings yet
- Part Iii: Functions From R TorDocument14 pagesPart Iii: Functions From R TorTeresa Villena GonzálezNo ratings yet
- Lectures 20Document82 pagesLectures 20sudhansh kumarNo ratings yet
- Diffcal Functions Lecture Part 1Document3 pagesDiffcal Functions Lecture Part 1May Alyssa BalladNo ratings yet
- Central ForcesDocument19 pagesCentral ForcesSoumyadeep DasNo ratings yet
- Curvilinear Coordinate SystemDocument15 pagesCurvilinear Coordinate SystemAnupam Kumar100% (2)
- A Brief Survey of Differential Geometry: Adrian Down August 29, 2006Document5 pagesA Brief Survey of Differential Geometry: Adrian Down August 29, 2006NeenaKhanNo ratings yet
- Problem Sheet 2Document2 pagesProblem Sheet 2Franz LisztNo ratings yet
- Limits & ContinuityDocument9 pagesLimits & ContinuityaliNo ratings yet
- Differential FormsDocument10 pagesDifferential FormsSamuel PatelNo ratings yet
- MTH403 (23-28)Document28 pagesMTH403 (23-28)Tahir KhanNo ratings yet
- Co-3 Course Material (Vector Calculus)Document15 pagesCo-3 Course Material (Vector Calculus)mahesh mickyNo ratings yet
- 7.2 The Covariant Derivative of A Vector/tensor FieldDocument7 pages7.2 The Covariant Derivative of A Vector/tensor FieldKurt CargoNo ratings yet
- Grad Div CurlDocument13 pagesGrad Div CurlMichael AdesanyaNo ratings yet
- VC 4Document25 pagesVC 4Németh MártonNo ratings yet
- Lecture 11: Application of Derivative: DT DVDocument12 pagesLecture 11: Application of Derivative: DT DVCapt John Daniel KamuliNo ratings yet
- General Theory of Relativity For Undergraduates - Chapter 1Document29 pagesGeneral Theory of Relativity For Undergraduates - Chapter 1Alexandre Masson VicenteNo ratings yet
- QFT Lecture 1Document8 pagesQFT Lecture 1Sergi SeguraNo ratings yet
- Function? ( (2, - 3), (4, 6), (3, - 1), (6, 6), (2, 3) ) : Domain and RangeDocument17 pagesFunction? ( (2, - 3), (4, 6), (3, - 1), (6, 6), (2, 3) ) : Domain and RangeRiot ShadowNo ratings yet
- Clase AvanzadaDocument6 pagesClase AvanzadallruNo ratings yet
- Lecture Note 5 PDFDocument30 pagesLecture Note 5 PDFFrendick LegaspiNo ratings yet
- How To FP2 - Revision Notes: Rational FunctionsDocument5 pagesHow To FP2 - Revision Notes: Rational FunctionsTiara TatyanadewiNo ratings yet
- Variables or Real Multivariate Function Is A Function With More Than One Argument, With AllDocument8 pagesVariables or Real Multivariate Function Is A Function With More Than One Argument, With AllMhalyn Üü NapuliNo ratings yet
- Jefferson Socias Final Exam in CalculusDocument3 pagesJefferson Socias Final Exam in CalculusJefferson SociasNo ratings yet
- Curvilinear Coo PDFDocument10 pagesCurvilinear Coo PDFabo7999No ratings yet
- Evan Dummit - Multiple - Integration - Calculus III - 2018 PDFDocument24 pagesEvan Dummit - Multiple - Integration - Calculus III - 2018 PDFogasofotiniNo ratings yet
- VectorAnalysis Long.Document58 pagesVectorAnalysis Long.amritenduNo ratings yet
- Integration CourseDocument60 pagesIntegration CourseTeikjin SeeNo ratings yet
- Radius of Curvature and Evolute of The Function Y F (X) : DX DF DX Dy DX Ds DyDocument7 pagesRadius of Curvature and Evolute of The Function Y F (X) : DX DF DX Dy DX Ds DySaddam HusainNo ratings yet
- Determinants Math 130 Linear AlgebraDocument4 pagesDeterminants Math 130 Linear AlgebraCody SageNo ratings yet
- Relations, Mappings, Functions, Sequences v2.10.0Document62 pagesRelations, Mappings, Functions, Sequences v2.10.0Marco RicardNo ratings yet
- Radiation Moving Charges: Potentials and Fields of A Moving Point ChargeDocument25 pagesRadiation Moving Charges: Potentials and Fields of A Moving Point Chargeosama hasanNo ratings yet
- Orthogonal Curvilinear CoordinatesDocument16 pagesOrthogonal Curvilinear CoordinatesstriaukasNo ratings yet
- Multivector Functions PDFDocument6 pagesMultivector Functions PDFAlireza TakrimiNo ratings yet
- Derivatives and Integrals EssayDocument13 pagesDerivatives and Integrals Essayapi-282374174No ratings yet
- Doku - Pub Calculus by Feliciano UyDocument83 pagesDoku - Pub Calculus by Feliciano UyLars JinNo ratings yet
- Curvilinear Coordinates Arfken 5th EdDocument14 pagesCurvilinear Coordinates Arfken 5th EdManoj SNo ratings yet
- Unit 4 Sessionwise ProblemsDocument10 pagesUnit 4 Sessionwise ProblemsAnokheeNo ratings yet
- Conservative PDFDocument18 pagesConservative PDFAbha SrivastavaNo ratings yet
- Affine Connections, Midpoint Formation, and Point ReflectionDocument14 pagesAffine Connections, Midpoint Formation, and Point ReflectionLew JulianNo ratings yet
- Differential FormsDocument10 pagesDifferential FormspianochemikerNo ratings yet
- Functions of Several VariablesDocument16 pagesFunctions of Several VariablesGitan ChopraNo ratings yet
- 1.1 The Cartesian Coordinate SpaceDocument4 pages1.1 The Cartesian Coordinate SpaceArunabh SinghNo ratings yet
- Finite GroupsDocument127 pagesFinite Groupstoura8No ratings yet
- Diff Geom YakovenoDocument87 pagesDiff Geom YakovenoSukhjit MannNo ratings yet
- Metric SpacesDocument34 pagesMetric SpacesScarlett Diaz100% (1)
- FunctionDocument1 pageFunctionGokul KrishNo ratings yet
- UNIT 1 MODULE 1 FinalDocument20 pagesUNIT 1 MODULE 1 FinalHunter 004No ratings yet
- Chap8 PDFDocument68 pagesChap8 PDFEric LeonardoNo ratings yet
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
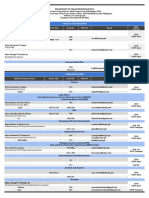
- Updated DOTr Directory As of 29 October 2021Document9 pagesUpdated DOTr Directory As of 29 October 2021Twinkle MiguelNo ratings yet
- JBL Constant Beamwidth Technology - CBT Series Passive Controlled-Coverage ColumnsDocument12 pagesJBL Constant Beamwidth Technology - CBT Series Passive Controlled-Coverage ColumnsTom HampleNo ratings yet
- Mita Lifestyle Agenda ContentDocument263 pagesMita Lifestyle Agenda Contentnacentral13517No ratings yet
- Ecs C42iix Rev C Vit m2400 1Document36 pagesEcs C42iix Rev C Vit m2400 1Victor Pic100% (1)
- The National TerritoryDocument39 pagesThe National TerritoryRan RanNo ratings yet
- Training Schedule April 2021 To March 22 - 0Document18 pagesTraining Schedule April 2021 To March 22 - 0sanrexiNo ratings yet
- Proline Table-Top Machines Z005 Up To Z100: Product InformationDocument2 pagesProline Table-Top Machines Z005 Up To Z100: Product InformationErika Mae EnticoNo ratings yet
- Un EinsteinDocument22 pagesUn Einsteinapi-26005027No ratings yet
- ActuatorsDocument24 pagesActuatorsharishcsharmaNo ratings yet
- Coord Angle and BearingDocument18 pagesCoord Angle and BearingvNo ratings yet
- Real Time DC Water Tank Level Control Using Arduino Mega 2560Document6 pagesReal Time DC Water Tank Level Control Using Arduino Mega 2560Sam ArNo ratings yet
- ETP Combined Spec - R0Document60 pagesETP Combined Spec - R0Pravash Chandra Senapaty100% (1)
- Freight ForwardingDocument43 pagesFreight ForwardingEuroline NtombouNo ratings yet
- 300+ TOP Production and Operation Management MCQs & AnswersDocument14 pages300+ TOP Production and Operation Management MCQs & AnswersPranoy SarkarNo ratings yet
- Material Balance & Energy Balance - Reactor-2Document32 pagesMaterial Balance & Energy Balance - Reactor-2Xy karNo ratings yet
- Numerical WindingDocument12 pagesNumerical Windingsujal jhaNo ratings yet
- Biogas Processes and Sustainable DevelopmentDocument199 pagesBiogas Processes and Sustainable DevelopmentH.J.PrabhuNo ratings yet
- Fra Assignment 1Document11 pagesFra Assignment 1Ruchi SambhariaNo ratings yet
- Criaturas Do Reino DistanteDocument53 pagesCriaturas Do Reino DistanteDaniel Marinho100% (1)
- Numerology 666 Meaning: What Angel Number 666 REALLY Means!Document2 pagesNumerology 666 Meaning: What Angel Number 666 REALLY Means!LlNo ratings yet
- 5754 Aluminum CircleDocument2 pages5754 Aluminum Circlewei huaNo ratings yet
- GFRC Floating Concrete Hearth For Concrete Wood FiDocument11 pagesGFRC Floating Concrete Hearth For Concrete Wood FiJuliano. PQMNo ratings yet
- Lonza ManualsProductInstructions Determination of Protein Concentration 31460Document2 pagesLonza ManualsProductInstructions Determination of Protein Concentration 31460sydneypadillioNo ratings yet