You might also like
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- EDC Chapter Wise FormulasDocument12 pagesEDC Chapter Wise FormulasKisthan Leymar67% (6)
- BioPhotonics - Fritz PoppDocument14 pagesBioPhotonics - Fritz Poppfoundryx2561100% (4)
- Doors & Windows BMCDocument42 pagesDoors & Windows BMCchandan sharma100% (4)
- Graphs Class 12 PhysicsDocument28 pagesGraphs Class 12 Physicshkartikpillai999No ratings yet
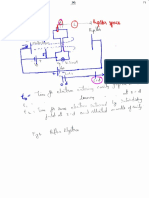
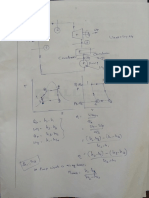
- UNIT III (4) Analysis of Reflex Klystron Condition For Oscillation Admittance SpiralDocument13 pagesUNIT III (4) Analysis of Reflex Klystron Condition For Oscillation Admittance Spiralsophie jamesNo ratings yet
- Rumus Fisika PATDocument3 pagesRumus Fisika PATNatasya NagitaNo ratings yet
- Problem Set 7Document2 pagesProblem Set 7Ykhay ElfanteNo ratings yet
- 61ee391f67fcea0018b8be02 - ## - CH 14 WavesDocument3 pages61ee391f67fcea0018b8be02 - ## - CH 14 Wavesvihaanchauhan28No ratings yet
- Ramktne Qcle: Ha-H H) (B, - Ha)Document10 pagesRamktne Qcle: Ha-H H) (B, - Ha)Mr I S A MNo ratings yet
- Unit 3 ACD Numerical SolutionsDocument6 pagesUnit 3 ACD Numerical SolutionsAnuj JainNo ratings yet
- Vigas InclinadasDocument6 pagesVigas InclinadasALBERTO COSTANo ratings yet
- Emanating: BroglieDocument5 pagesEmanating: BroglieGourav SinghNo ratings yet
- s:d&EO: + In) DP - TDocument3 pagess:d&EO: + In) DP - TKumar BNo ratings yet
- Sodapdf-Merged 4Document5 pagesSodapdf-Merged 4harshrajclass9brollno.21No ratings yet
- Short Note of Solutions ChapterDocument1 pageShort Note of Solutions Chapterkaushikkundu8587No ratings yet
- ESO202 Conceptual NotesDocument71 pagesESO202 Conceptual NotesUdayasreeNo ratings yet
- DC and Ac Machinery: Ee2MeDocument10 pagesDC and Ac Machinery: Ee2MeJay Johnel ManaloNo ratings yet
- สรุปฟิสิกDocument12 pagesสรุปฟิสิกFeLiNaNo ratings yet
- Physics Chapter 2Document16 pagesPhysics Chapter 2Aadith KichuNo ratings yet
- Diffraction20161119122257952 PDFDocument5 pagesDiffraction20161119122257952 PDFAkshat GuptaNo ratings yet
- Continum 1Document24 pagesContinum 1kalpitrawat16908No ratings yet
- Optics 2009Document18 pagesOptics 2009eng.muhanad moussaNo ratings yet
- 6 Electro Magnetic InductionDocument9 pages6 Electro Magnetic Inductionpsyco4513No ratings yet
- SR - Power ElectronicsDocument20 pagesSR - Power ElectronicsBitan BanerjeeNo ratings yet
- 9 - Dr. M. Atia - Gas Power Cycles-Otto CycleDocument27 pages9 - Dr. M. Atia - Gas Power Cycles-Otto CycleBahaa RaghebNo ratings yet
- Modern PhysicsDocument3 pagesModern PhysicsShambhavi herekarNo ratings yet
- Before Exam SeeDocument4 pagesBefore Exam SeearpanpurkaitpersonalNo ratings yet
- Gravitation Planetary MotionDocument8 pagesGravitation Planetary Motiondesiji8460No ratings yet
- Aecos: Velocity V Osellhion3 Y (STDocument2 pagesAecos: Velocity V Osellhion3 Y (STA M SNo ratings yet
- Transformer With On-Load Tap-Changer: Shandong Dachi Electric Co, LTDDocument1 pageTransformer With On-Load Tap-Changer: Shandong Dachi Electric Co, LTDArjunansyah LakidendeNo ratings yet
- Hw. 3Document4 pagesHw. 3MySunNo ratings yet
- Apuntes Propulsión FinalDocument2 pagesApuntes Propulsión FinalRoger Martínez PardellNo ratings yet
- Lat Soal - 11 - 10Document16 pagesLat Soal - 11 - 10meuthiaaisyah061No ratings yet
- ATD Air CompressorDocument12 pagesATD Air CompressorHashim Rehman ShariefNo ratings yet
- B2 Diya Choudhary BEE01Document3 pagesB2 Diya Choudhary BEE01Diya ChoudharyNo ratings yet
- Ipeueukal) :: Dseial GainDocument21 pagesIpeueukal) :: Dseial Gainaditya narayan shuklaNo ratings yet
- Miiitpcxi-Xii-Ka-Omxjtpcic-X.Lt/Exz - Oxiftl B, Et: Wr-Tfen - Ae#TfifmDocument8 pagesMiiitpcxi-Xii-Ka-Omxjtpcic-X.Lt/Exz - Oxiftl B, Et: Wr-Tfen - Ae#TfifmSimonNo ratings yet
- MM Academy Test 02 (Explanation) - 05 May - by Hassnain HaiderDocument10 pagesMM Academy Test 02 (Explanation) - 05 May - by Hassnain HaiderAbdul HannanNo ratings yet
- Phy Unit 5 FormulasDocument7 pagesPhy Unit 5 FormulasEfath UddinNo ratings yet
- Formulari de Física Quàntica: Víctor García CarrascoDocument3 pagesFormulari de Física Quàntica: Víctor García Carrascoelvert nilton torres farroñanNo ratings yet
- MATH 122 P 4-8Document5 pagesMATH 122 P 4-8kaushal bhagatNo ratings yet
- Composite StructureDocument5 pagesComposite StructureRizwan RasidNo ratings yet
- Physics PracticalDocument16 pagesPhysics Practicaldevinanhi890No ratings yet
- Aplicación Leyes de Los GasesDocument3 pagesAplicación Leyes de Los GasesLuis De LeonNo ratings yet
- Phelefleas: Matter TheDocument13 pagesPhelefleas: Matter TheSudhir SharmaNo ratings yet
- Presentasi RectifierDocument31 pagesPresentasi RectifierBayu Arga NugrahaNo ratings yet
- Alpu: Ts-Bah CT + (Y - T (H-Tos) AsDocument3 pagesAlpu: Ts-Bah CT + (Y - T (H-Tos) AsShivansh SinghNo ratings yet
- The Standard Model and Particle Physics: Pittsburgh, May 9, 2018 - P. 1Document56 pagesThe Standard Model and Particle Physics: Pittsburgh, May 9, 2018 - P. 1Manuel GonzalezNo ratings yet
- Instrumentation LaboratoryDocument203 pagesInstrumentation LaboratoryswapnilNo ratings yet
- CHP 5Document4 pagesCHP 5Carlos YoongNo ratings yet
- Eee Eeeeefj3 Eeeeee: Department of Electrical Electronic Engineering Bangladesh University of Engineering TechnologyDocument3 pagesEee Eeeeefj3 Eeeeee: Department of Electrical Electronic Engineering Bangladesh University of Engineering TechnologyMeowNo ratings yet
- Seminario 11 - 09Document20 pagesSeminario 11 - 09Andres Parra MuñozNo ratings yet
- Thermal Equation NotesDocument3 pagesThermal Equation NotesIsaac PittmanNo ratings yet
- SolutionDocument5 pagesSolutionRajat Verma X D 39No ratings yet
- A New Type of Arc Plasma Reactor With Twelve-Phase Alternating Current Discharge For Synthesis of Carbon NanotubesDocument6 pagesA New Type of Arc Plasma Reactor With Twelve-Phase Alternating Current Discharge For Synthesis of Carbon NanotubesSalah MostafapourNo ratings yet
- Ujian IPA TomorrowDocument14 pagesUjian IPA TomorrowSan NarayanaNo ratings yet
- 21-22 DSB SC ModulationDocument6 pages21-22 DSB SC Modulationkarthik reddyNo ratings yet
- Debellocivilicom 00 CaesuoftDocument184 pagesDebellocivilicom 00 CaesuoftDariusthekiller 15No ratings yet
- Very Short Notes For Dual NatureDocument8 pagesVery Short Notes For Dual NatureAnkit RawaniNo ratings yet
- EllipseDocument66 pagesEllipsechirag birlaNo ratings yet
- A0260162R-Zhao Zijie-5502 Homework2Document7 pagesA0260162R-Zhao Zijie-5502 Homework2赵子杰No ratings yet
- Solar Lunar Reversals in XLY by Suleymanova Smoot Kasture FellowsDocument67 pagesSolar Lunar Reversals in XLY by Suleymanova Smoot Kasture FellowsBobby MorinNo ratings yet
- CAE ReviewDocument2 pagesCAE ReviewAnastasia MelnicovaNo ratings yet
- CHP 5 - Steel Alloy and Heat Treatment SPSDocument43 pagesCHP 5 - Steel Alloy and Heat Treatment SPSWahyu Dimas NNo ratings yet
- Sky Air-VRV Cassette Range - ProductDocument20 pagesSky Air-VRV Cassette Range - ProductDragos PicuNo ratings yet
- Welcome To HPE Partner Ready Certification and Learning. This Document Will Guide You ThroughDocument14 pagesWelcome To HPE Partner Ready Certification and Learning. This Document Will Guide You ThroughjorgeNo ratings yet
- An International Perspective: Weihrich and KoontzDocument36 pagesAn International Perspective: Weihrich and KoontzVkaeyNo ratings yet
- Auditing and Assurance PrinciplesDocument38 pagesAuditing and Assurance PrinciplesBryzan Dela CruzNo ratings yet
- Accomplishment ReportDocument2 pagesAccomplishment ReportRandz Takiawan100% (3)
- Visions of Poseida, Atlantis, The Mathematical Formula of Nature and The Use of Crystals - The Paul Solomon Source Reading Excerpt #73 PDFDocument3 pagesVisions of Poseida, Atlantis, The Mathematical Formula of Nature and The Use of Crystals - The Paul Solomon Source Reading Excerpt #73 PDFNikšaNo ratings yet
- Systematic Qualitative Analysis of Simple SaltDocument9 pagesSystematic Qualitative Analysis of Simple SaltNisha VethigaNo ratings yet
- Quiz Materials - 1 - A PDFDocument3 pagesQuiz Materials - 1 - A PDFHafis SayedNo ratings yet
- 12.daftar PustakaDocument6 pages12.daftar PustakaClosyanaura Intan ArmayaNo ratings yet
- EC Council Career Path 2015Document1 pageEC Council Career Path 2015Atul MahajanNo ratings yet
- Caf DMT PTS052Document1 pageCaf DMT PTS052joko toleNo ratings yet
- MISDocument11 pagesMISdivyansh singhNo ratings yet
- Cost Configuration: Total Haulage Cost/quantityDocument11 pagesCost Configuration: Total Haulage Cost/quantityObinna ObiefuleNo ratings yet
- Level 4 Term 2 Revision Practice For ExamsDocument9 pagesLevel 4 Term 2 Revision Practice For ExamsSonia Del Val CasasNo ratings yet
- FLBOEA Course Notes Welding MEM05026B-Sections 13-18Document111 pagesFLBOEA Course Notes Welding MEM05026B-Sections 13-18stanleyNo ratings yet
- Non-Pen MountDocument17 pagesNon-Pen MountT BagNo ratings yet
- IMS PolicyDocument1 pageIMS PolicySandeep MazumdarNo ratings yet
- NF 2021 CA BriefDocument4 pagesNF 2021 CA BriefSeanNo ratings yet
- Mba Ca @ PDFDocument9 pagesMba Ca @ PDFShashank Cooled RanaNo ratings yet
- Year 5 Maths RevisionDocument26 pagesYear 5 Maths RevisionWilsonBrendan100% (5)
- Astm F 402Document2 pagesAstm F 402frengki jm100% (1)
- Municipal Solid Waste Management: FundamentalsDocument12 pagesMunicipal Solid Waste Management: FundamentalsTechsrijan DriveNo ratings yet
- MMBT4124LT1G General Purpose Transistor: NPN SiliconDocument5 pagesMMBT4124LT1G General Purpose Transistor: NPN SiliconjosecarlosvjNo ratings yet
- 05 9MA0 01 9MA0 02 A Level Pure Mathematics Practice Set 5Document6 pages05 9MA0 01 9MA0 02 A Level Pure Mathematics Practice Set 5alexander.tarakanovNo ratings yet
- Multilin F60: Grid SolutionsDocument9 pagesMultilin F60: Grid Solutionsapic20No ratings yet