You might also like
- Big Book of Data Warehousing and Bi v9 122723 Final 0Document88 pagesBig Book of Data Warehousing and Bi v9 122723 Final 0AblekkNo ratings yet
- 8 Elements of Digital LiteracyDocument5 pages8 Elements of Digital LiteracyShiela Mendoza100% (1)
- Lec 06Document78 pagesLec 06prakashNo ratings yet
- Vlsi Physical DesignDocument26 pagesVlsi Physical Designilias ahmed100% (1)
- Module 9, Week 10, CE-301, Dr. Bashir AlamDocument71 pagesModule 9, Week 10, CE-301, Dr. Bashir AlamMohd IdreesNo ratings yet
- Lecture9 Placement1Document68 pagesLecture9 Placement1api-3834272100% (1)
- Lecture 07: PARTITIONING: Prof. Indranil SenguptaDocument143 pagesLecture 07: PARTITIONING: Prof. Indranil SenguptaAkhendra KumarNo ratings yet
- Dr. Abhijit R Asati EEE Department, BITS, PilaniDocument22 pagesDr. Abhijit R Asati EEE Department, BITS, PilaniNeha PachauriNo ratings yet
- Grid GenerationDocument41 pagesGrid GenerationAmbrish Singh100% (1)
- c6 ConstraintsDocument42 pagesc6 ConstraintsSamir SabryNo ratings yet
- Physical Design AutomationDocument116 pagesPhysical Design Automationijalab1No ratings yet
- Physical Design AutomationDocument116 pagesPhysical Design AutomationMaheshNo ratings yet
- Building Diversified Portfolios That Outperform Out-Of-SampleDocument33 pagesBuilding Diversified Portfolios That Outperform Out-Of-SampleQuant BotsNo ratings yet
- Lec - 29 FinalDocument31 pagesLec - 29 FinalChirithoti Sai CharanNo ratings yet
- PMBD 04 ClusteringDocument59 pagesPMBD 04 ClusteringDiana PernasNo ratings yet
- AIAA Meeting 2008, Orlando, Florida: Adaptive Mesh Refinement Strategies For Immersed Boundary Methods (Invited)Document27 pagesAIAA Meeting 2008, Orlando, Florida: Adaptive Mesh Refinement Strategies For Immersed Boundary Methods (Invited)aramchikNo ratings yet
- 8 - ClusteringDocument85 pages8 - ClusteringMH PolashNo ratings yet
- Structural Engg. Lecture 1Document34 pagesStructural Engg. Lecture 1Mr. Danish SaeedNo ratings yet
- Gap StatisticDocument32 pagesGap StatisticKikie Goguma GyuNo ratings yet
- ML Module 5 1Document37 pagesML Module 5 1Lahari bilimaleNo ratings yet
- Physical Design - Overall FlowDocument40 pagesPhysical Design - Overall Flowshabbir470No ratings yet
- Probabilistic PathDocument48 pagesProbabilistic PathMorigia SimanjuntakNo ratings yet
- A Simple 2D Interpolation Model For AnalDocument5 pagesA Simple 2D Interpolation Model For AnalAl Daniel ManibaleNo ratings yet
- BigDataAnalytics-Chapter 6Document35 pagesBigDataAnalytics-Chapter 6Shahab KarimNo ratings yet
- Introduction To Physical DesignDocument28 pagesIntroduction To Physical DesignmanojpeehuNo ratings yet
- Stiffness Method - Truss (Part 1)Document42 pagesStiffness Method - Truss (Part 1)Leediya AfrinaNo ratings yet
- Clustering K-MeansDocument28 pagesClustering K-MeansFaysal AhammedNo ratings yet
- Numerical Experimentation: GoalsDocument3 pagesNumerical Experimentation: GoalsSNaveenMathewNo ratings yet
- Analog LayoutDocument116 pagesAnalog LayoutvinayNo ratings yet
- Chap 6-1Document22 pagesChap 6-1Mareyam DnglNo ratings yet
- Storage & Solution-1Document5 pagesStorage & Solution-1Anonymous Zz1bV7H59yNo ratings yet
- Topological Sorting: Directed Acyclic GraphDocument22 pagesTopological Sorting: Directed Acyclic Graphmark edwardsNo ratings yet
- Computer Vision & Digital Image ProcessingDocument8 pagesComputer Vision & Digital Image ProcessingSiva Dharshan ValuvanNo ratings yet
- Kernel Nearest Neighbor AlgorithmDocument11 pagesKernel Nearest Neighbor AlgorithmEkta GavasNo ratings yet
- Lecture 3 Kinematics of MechanismsDocument17 pagesLecture 3 Kinematics of MechanismsthezNo ratings yet
- Outline: - What Is Physical Design - Design Methods - Design Styles - Analysis and VerificationDocument43 pagesOutline: - What Is Physical Design - Design Methods - Design Styles - Analysis and VerificationGaurav SaxenaNo ratings yet
- Lecture17 RoutingDocument51 pagesLecture17 Routingapi-3834272No ratings yet
- Constrained Centroidal Voronoi Tessellations For MDocument38 pagesConstrained Centroidal Voronoi Tessellations For MVenugopal GudimetlaNo ratings yet
- 3 Beam AnalysisDocument15 pages3 Beam AnalysisSteven KuaNo ratings yet
- Computer Graphics: BY N.Sathish Kumar AP CSEDocument24 pagesComputer Graphics: BY N.Sathish Kumar AP CSEمحمد طلال الدبإغNo ratings yet
- ML Cat 2 - 3Document13 pagesML Cat 2 - 3Ved PrakashNo ratings yet
- Introduction To NetworksDocument60 pagesIntroduction To NetworksKarim CHERIFINo ratings yet
- Finite Elements Method in Structures: (Lec-1-A)Document16 pagesFinite Elements Method in Structures: (Lec-1-A)Muller AsmareNo ratings yet
- Lecture 11 - Approximate MethodDocument29 pagesLecture 11 - Approximate MethodKhaled AlregebNo ratings yet
- Introduction To Data Science Unsupervised Learning: CS 194 Fall 2015 John CannyDocument54 pagesIntroduction To Data Science Unsupervised Learning: CS 194 Fall 2015 John CannyPedro Jesús García RamosNo ratings yet
- Lec - 39Document29 pagesLec - 39Chirithoti Sai CharanNo ratings yet
- Lecture 10: Sparse Systems: Prof. Tom Overbye Dept. of Electrical and Computer Engineering Texas A&M UniversityDocument22 pagesLecture 10: Sparse Systems: Prof. Tom Overbye Dept. of Electrical and Computer Engineering Texas A&M UniversityManuelNo ratings yet
- 30-07-2022 Unit2bDocument66 pages30-07-2022 Unit2bSarnithaNo ratings yet
- Numerical Methods in CFDDocument40 pagesNumerical Methods in CFDrushikumarNo ratings yet
- Chapter 1Document25 pagesChapter 1Samuel Jacob KarunakaranNo ratings yet
- Review Lecture 21:: - Time-Marching Methods and Odes - Ivps: EndDocument22 pagesReview Lecture 21:: - Time-Marching Methods and Odes - Ivps: EndnooredinqadiriNo ratings yet
- 9.54 Class 13: Unsupervised LearningDocument54 pages9.54 Class 13: Unsupervised LearningGrantMwakipundaNo ratings yet
- Se - Trusses and Gauss Jordan MethodDocument69 pagesSe - Trusses and Gauss Jordan MethodEr Rajasekhar RaoNo ratings yet
- Engineering Mechanics (ME-221)Document33 pagesEngineering Mechanics (ME-221)M Muqeet TahirNo ratings yet
- REVIEW Lecture 21:: - End of Time-Marching Methods: Higher-Order MethodsDocument23 pagesREVIEW Lecture 21:: - End of Time-Marching Methods: Higher-Order MethodscostpopNo ratings yet
- Hidden Variables, The EM Algorithm, and Mixtures of GaussiansDocument58 pagesHidden Variables, The EM Algorithm, and Mixtures of GaussiansDUDEKULA VIDYASAGARNo ratings yet
- Lec 5Document30 pagesLec 5tanmay.bhatnagar03No ratings yet
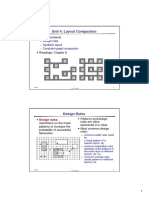
- Lec CompactionDocument15 pagesLec CompactionPrabhavathi PNo ratings yet
- Discrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)From EverandDiscrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)No ratings yet
- Integration of One-forms on P-adic Analytic Spaces. (AM-162)From EverandIntegration of One-forms on P-adic Analytic Spaces. (AM-162)No ratings yet
- Semiclassical Soliton Ensembles for the Focusing Nonlinear Schrödinger Equation (AM-154)From EverandSemiclassical Soliton Ensembles for the Focusing Nonlinear Schrödinger Equation (AM-154)No ratings yet
- Lec - 30 FinalDocument38 pagesLec - 30 FinalChirithoti Sai CharanNo ratings yet
- Lec - 38Document25 pagesLec - 38Chirithoti Sai CharanNo ratings yet
- Lec - 50 FinalDocument33 pagesLec - 50 FinalChirithoti Sai CharanNo ratings yet
- MEC 205 Thermodynamics and Fluid LabDocument75 pagesMEC 205 Thermodynamics and Fluid LabChirithoti Sai CharanNo ratings yet
- IIIT KancheepuramDocument36 pagesIIIT KancheepuramChirithoti Sai CharanNo ratings yet
- AI IN AGRICULTURE - EditedDocument6 pagesAI IN AGRICULTURE - EditedMonisha ChaturvediNo ratings yet
- Jurnal Penelitian Transportasi Darat: Manajemen Sistem Transportasi Perkotaan YogyakartaDocument8 pagesJurnal Penelitian Transportasi Darat: Manajemen Sistem Transportasi Perkotaan YogyakartaFelia LiandaNo ratings yet
- Cooling Tower TroubleshootingDocument4 pagesCooling Tower TroubleshootingTobaNo ratings yet
- Niir Directory Database List Companies Sme Industries in Himachal Pradesh Uttarakhand 2nd EditionDocument2 pagesNiir Directory Database List Companies Sme Industries in Himachal Pradesh Uttarakhand 2nd EditionDeepak MoryaNo ratings yet
- PWD ZP Wrd6000+ Previous - Year Mcqs With ExplanationDocument29 pagesPWD ZP Wrd6000+ Previous - Year Mcqs With ExplanationvishalNo ratings yet
- This Is A First-to-Market' Fraud Prevention Method Offered by FNBDocument2 pagesThis Is A First-to-Market' Fraud Prevention Method Offered by FNBSmile TimeNo ratings yet
- Building Java Programs A Back To Basics Approach 4th Edition Reges Test Bank 1Document13 pagesBuilding Java Programs A Back To Basics Approach 4th Edition Reges Test Bank 1thomashayescdrjaymwgx100% (26)
- A New Software Engineering Course For UnDocument8 pagesA New Software Engineering Course For UnTony Espinosa AtocheNo ratings yet
- Curriculum Vitae: Extra QualificationDocument3 pagesCurriculum Vitae: Extra QualificationARUN VISHWAKARMANo ratings yet
- Apps WVD Infographic The Virtual EnvironmentDocument1 pageApps WVD Infographic The Virtual EnvironmentElastic ITNo ratings yet
- Big Data Analytics (BDAG 19-5) : Quiz: GMP - 2019 Term VDocument2 pagesBig Data Analytics (BDAG 19-5) : Quiz: GMP - 2019 Term VdebmatraNo ratings yet
- It Skills Lab 60 Viva Que & Ans - 1142955 - 2023 - 06 - 25 - 17 - 06Document10 pagesIt Skills Lab 60 Viva Que & Ans - 1142955 - 2023 - 06 - 25 - 17 - 06V VikasNo ratings yet
- IGRSM ProgramDetailDocument11 pagesIGRSM ProgramDetailasmalanewNo ratings yet
- 1.3 Computer HardwareDocument76 pages1.3 Computer HardwareMuhammad ZahooruddinNo ratings yet
- Steam Turbines For CS PowerDocument6 pagesSteam Turbines For CS PowerPower PowerNo ratings yet
- Manual Handling - Ladder UseDocument16 pagesManual Handling - Ladder UseTony BakerNo ratings yet
- Ullage Table of MT ELISEDocument65 pagesUllage Table of MT ELISEAbu Syeed Md. Aurangzeb Al Masum100% (1)
- KCSE 2009 Agriculture P1Document7 pagesKCSE 2009 Agriculture P1Urex ZNo ratings yet
- METHODOLOG1Document3 pagesMETHODOLOG1Essa M RoshanNo ratings yet
- Chapter 01 - Planning and Engagement - HandoutDocument80 pagesChapter 01 - Planning and Engagement - HandoutWayne WayneNo ratings yet
- ASI451141 User-Manual1Document1 pageASI451141 User-Manual1Sakthi VelayuthanNo ratings yet
- Datasheet 1N5220Document4 pagesDatasheet 1N5220LAB14 B1No ratings yet
- Rrus 01Document2 pagesRrus 01zeeshanriaz1077100% (2)
- PaascheAirbrushCat 2014 PDFDocument24 pagesPaascheAirbrushCat 2014 PDFDavid ZimmermanNo ratings yet
- 11 MIG+MAG+TorchesDocument5 pages11 MIG+MAG+TorchesLLNo ratings yet
- Template-CV OrganizeDocument2 pagesTemplate-CV OrganizeeminieNo ratings yet
- E4-E5 - Text - Chapter 4. CONVERGED PACKET BASED AGGREGATION NETWORK (CPAN)Document11 pagesE4-E5 - Text - Chapter 4. CONVERGED PACKET BASED AGGREGATION NETWORK (CPAN)nilesh_2014No ratings yet
- 2020 04 29T19 24 03 - R3dlogDocument9 pages2020 04 29T19 24 03 - R3dlogConfusTrefleNo ratings yet