You might also like
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
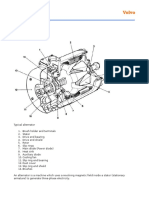
- AlternatorsDocument43 pagesAlternatorsPauline SilvaNo ratings yet
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2From EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2No ratings yet
- Alternators PDFDocument57 pagesAlternators PDFChanning Tatum100% (5)
- Overcurrent Protection Device BasisDocument10 pagesOvercurrent Protection Device Basisrobertino_97No ratings yet
- Previews IEEE 835-1994 PreDocument9 pagesPreviews IEEE 835-1994 PreKadirou BigstarNo ratings yet
- Alternator Volvo - KnowledgeDocument19 pagesAlternator Volvo - KnowledgeWayank Van Hellsing100% (1)
- Technical Manual Publ. No. 6193.012 0616 Electrical SystemDocument76 pagesTechnical Manual Publ. No. 6193.012 0616 Electrical SystemAdam Putra100% (1)
- Power Converters Lab Manual - M.Tech (PE&ED) - Prepared by Dr.T.DevarajuDocument50 pagesPower Converters Lab Manual - M.Tech (PE&ED) - Prepared by Dr.T.DevarajuhodeeesvcetNo ratings yet
- ZXK 1200 Ascensor Hidrocableado Chino - User Manual (Hydraulic Drive System)Document24 pagesZXK 1200 Ascensor Hidrocableado Chino - User Manual (Hydraulic Drive System)BrianEstebanNo ratings yet
- Electrical Machines II LAB MANUALDocument45 pagesElectrical Machines II LAB MANUALram kumarNo ratings yet
- Electrical Machine-Ii Lab ManualDocument33 pagesElectrical Machine-Ii Lab ManualTauhidul Haque100% (1)
- Alternators PDFDocument57 pagesAlternators PDFHoo Waijian100% (1)
- Assignment 5 Sir TubanDocument16 pagesAssignment 5 Sir TubanVincoy JohnlloydNo ratings yet
- BLDC Motor Drive Animated PresentationDocument25 pagesBLDC Motor Drive Animated PresentationUsman HaiderNo ratings yet
- BLDC Motor Application Techniques 1701585005Document50 pagesBLDC Motor Application Techniques 1701585005qn27kkbf4hNo ratings yet
- 1 Experiment No 1 Schrage MotorDocument4 pages1 Experiment No 1 Schrage Motorvishal9119No ratings yet
- 53 - 36765 - ME593 - 2014 - 1 - 1 - 1 - AC Motors, 2Document39 pages53 - 36765 - ME593 - 2014 - 1 - 1 - 1 - AC Motors, 2BigNo ratings yet
- Ntrol Induction Motors by AC Voltage Controllers: N Nmo R o L LDocument10 pagesNtrol Induction Motors by AC Voltage Controllers: N Nmo R o L Lbond jamesNo ratings yet
- Experiment 7 (A) : Power Measurement in Ac Circuits: ObjectiveDocument2 pagesExperiment 7 (A) : Power Measurement in Ac Circuits: ObjectiveSAKSHI SINGHNo ratings yet
- Lab Manual: ACADEMIC YEAR 2015-16Document48 pagesLab Manual: ACADEMIC YEAR 2015-16ramjiNo ratings yet
- Three Phase Bridge Inverter Explained - Electrical ConceptsDocument9 pagesThree Phase Bridge Inverter Explained - Electrical ConceptsMohammad HamamdNo ratings yet
- BEE Lab ManualDocument17 pagesBEE Lab ManualDr-Ahmed ElkoranyNo ratings yet
- Synchronous Machine - ConstructionDocument28 pagesSynchronous Machine - ConstructionimranNo ratings yet
- IT-5170 Stepper MotorDocument17 pagesIT-5170 Stepper MotorIshfaq AhmadNo ratings yet
- EEE2003 - Electromechanical Energy Conversion Lab: School of Electrical EngineeringDocument12 pagesEEE2003 - Electromechanical Energy Conversion Lab: School of Electrical EngineeringAkshit VSNo ratings yet
- Nota Kuliah 4 (Measurement and Instumentation)Document13 pagesNota Kuliah 4 (Measurement and Instumentation)Azizah Mat YusofNo ratings yet
- New First Year Electrical Lab ManualDocument22 pagesNew First Year Electrical Lab ManualArivumani90% (10)
- AlternatorsDocument28 pagesAlternatorshs637717No ratings yet
- Three Phase Induction RegulatorDocument5 pagesThree Phase Induction RegulatormohamedmohebNo ratings yet
- Anna University Practical Lab Manuals For Engineering StudentsDocument13 pagesAnna University Practical Lab Manuals For Engineering StudentsTinku RathoreNo ratings yet
- Universal MotorDocument24 pagesUniversal Motorsnh.2k19No ratings yet
- Low Cost High Power DensityDocument7 pagesLow Cost High Power Densityrakeshee2007No ratings yet
- Lecture Three - Review of DC-AC InvertersDocument87 pagesLecture Three - Review of DC-AC InvertersShimelisNo ratings yet
- Parameters of Iron Core InductorDocument3 pagesParameters of Iron Core Inductorమారుతీ రామ్. ధరణీప్రగడ.వెం.సుNo ratings yet
- MTS-231 Actuating Systems: Kanwal NaveedDocument55 pagesMTS-231 Actuating Systems: Kanwal NaveedARSLAN FALAKNo ratings yet
- Induction Motor Part-4Document34 pagesInduction Motor Part-4Jay PatelNo ratings yet
- Synchmachine 1Document68 pagesSynchmachine 1Godlisten NyariNo ratings yet
- 5.0 DC Machines: Basic Electrical Engineering ELE 290Document20 pages5.0 DC Machines: Basic Electrical Engineering ELE 290Harizx SaufixNo ratings yet
- PDU Lab Reports 8 To 14Document11 pagesPDU Lab Reports 8 To 14Shahroze TayyebNo ratings yet
- Exp 1 N 2Document16 pagesExp 1 N 2mallikarjunbpatilNo ratings yet
- Experiment No 2Document7 pagesExperiment No 2Krishnaa SharmaNo ratings yet
- Exp.2 - No-Load and Blocked Rotor Test On A Three-Phase Squirrel Cage InductionDocument4 pagesExp.2 - No-Load and Blocked Rotor Test On A Three-Phase Squirrel Cage InductionMasood RizviNo ratings yet
- Electrical CircuitsDocument25 pagesElectrical CircuitsMennaNo ratings yet
- Aust/Eee: Ahsanullah University of Science and TechnologyDocument44 pagesAust/Eee: Ahsanullah University of Science and Technologyruhul aminNo ratings yet
- Binder 1Document48 pagesBinder 1deepanshu rajputNo ratings yet
- Synchro Transmitter and Receiver: Operation ManualDocument6 pagesSynchro Transmitter and Receiver: Operation Manualnved01100% (1)
- DECE Lab IeDocument7 pagesDECE Lab IemurthyNo ratings yet
- A New Brushless Excitation Method For Three-Phase Synchronous Generator With Cylindrical-RotorDocument8 pagesA New Brushless Excitation Method For Three-Phase Synchronous Generator With Cylindrical-RotorSurajit SahaNo ratings yet
- EM-II FinalDocument57 pagesEM-II FinalAtchyut Satya KumarNo ratings yet
- DC Motor, Motor: DriverDocument28 pagesDC Motor, Motor: DriverLykaShanineGabrielMendozaNo ratings yet
- 142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFDocument15 pages142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFGopinath B L NaiduNo ratings yet
- Unit 2 TransformerDocument50 pagesUnit 2 Transformersmr100% (1)
- Electrical Machines IIDocument6 pagesElectrical Machines IIsuryaprakash001No ratings yet
- Document PDFDocument21 pagesDocument PDFHarizx SaufixNo ratings yet
- Exp 1 N 2Document8 pagesExp 1 N 2mallikarjunbpatilNo ratings yet
- 2.characteristics of A Typical Power System LoadDocument3 pages2.characteristics of A Typical Power System Loadarjuna4306No ratings yet
- CH 3Document57 pagesCH 3kassayeabate21No ratings yet
- Dokumen - Tips - Brake Test On The 3 Phase Induction MotorDocument2 pagesDokumen - Tips - Brake Test On The 3 Phase Induction Motorvamsikumar reddyNo ratings yet
- Unit 3 PMBLDC MotorDocument14 pagesUnit 3 PMBLDC MotorSuganthiNo ratings yet
- Report Power eDocument17 pagesReport Power enor anisNo ratings yet
- لقطة شاشة 2023-02-09 في 1.00.13 ص PDFDocument24 pagesلقطة شاشة 2023-02-09 في 1.00.13 ص PDFsajjad aakulNo ratings yet
- CAT055 IgnitionDocument19 pagesCAT055 IgnitionDan688No ratings yet
- 25 Flexi Remote Radio Head 8TX 3500 (FZQE)Document5 pages25 Flexi Remote Radio Head 8TX 3500 (FZQE)nazilaNo ratings yet
- Physics Investigatory Project On: - : Charging and Discharging of Capacitor in R-C CircuitsDocument16 pagesPhysics Investigatory Project On: - : Charging and Discharging of Capacitor in R-C CircuitsHritikaNo ratings yet
- LEB30303 Electrical Machine Synchronous Machines: Ahmad Zawawi Bin Jamaluddin Atzroulnizam Abu DR - Wardiah Mohd DahalanDocument57 pagesLEB30303 Electrical Machine Synchronous Machines: Ahmad Zawawi Bin Jamaluddin Atzroulnizam Abu DR - Wardiah Mohd DahalanAmmar RamanNo ratings yet
- Solis Manual RHI (3-6) K 5G ENX V1,5Document41 pagesSolis Manual RHI (3-6) K 5G ENX V1,5alessio “furiosbomba” lo medicoNo ratings yet
- Unicon Manual - Weigh FeederDocument60 pagesUnicon Manual - Weigh FeedervaibhavnriitmNo ratings yet
- Digital and Industrial ElectronicsDocument50 pagesDigital and Industrial ElectronicsF. FaiqNo ratings yet
- 1finity Housing: Data SheetDocument3 pages1finity Housing: Data SheetansisNo ratings yet
- Electrical Submersible Pump HandbookDocument67 pagesElectrical Submersible Pump HandbookAnonymous Xy309m9Sm9No ratings yet
- Case 1: Constant Voltage: Application: Series RC CircuitDocument12 pagesCase 1: Constant Voltage: Application: Series RC CircuitEm's_08No ratings yet
- Development of Electrochemical Micromachining (ECMM) SetupDocument6 pagesDevelopment of Electrochemical Micromachining (ECMM) SetupSilviu BuzeaNo ratings yet
- Bandpass Project PDFDocument13 pagesBandpass Project PDFarjun aluNo ratings yet
- Sharp LC-46XL1E PDFDocument194 pagesSharp LC-46XL1E PDFboroda2410100% (1)
- Cooper Power Systems 6422 2t Catalog PageDocument12 pagesCooper Power Systems 6422 2t Catalog PagepatipanpanitanNo ratings yet
- 312bju PFFDocument21 pages312bju PFFramchandragiri828109No ratings yet
- Microprocessor Pup Exp 4Document9 pagesMicroprocessor Pup Exp 4Teejay JamlangNo ratings yet
- Circuito Lambda Interface Cj135 - BoschDocument2 pagesCircuito Lambda Interface Cj135 - BoschAlberto MiglinoNo ratings yet
- Xantrex Regulador MPPT 60A 150VDocument2 pagesXantrex Regulador MPPT 60A 150Vglopet569977No ratings yet
- Data Acquisition and Control Interface: Labvolt SeriesDocument56 pagesData Acquisition and Control Interface: Labvolt SeriesAlexander AlbertNo ratings yet
- 4-Bit Binary Full Adder With Fast Carry SN54/74LS283: Low Power SchottkyDocument4 pages4-Bit Binary Full Adder With Fast Carry SN54/74LS283: Low Power SchottkyLoth Matheus Barba MazaNo ratings yet
- How To Test The LED Driver Using The 3341G Series LED DC Electronic Load SimulatorDocument17 pagesHow To Test The LED Driver Using The 3341G Series LED DC Electronic Load SimulatorPredrag NemcicNo ratings yet
- 2VAA002472 - en S Turbine Control SPFCS01 Frequency Counter ModuleDocument53 pages2VAA002472 - en S Turbine Control SPFCS01 Frequency Counter Moduleanbarasan100% (1)
- EPC - SD Series (Rectifier)Document4 pagesEPC - SD Series (Rectifier)Gela RazmadzeNo ratings yet
- Autonics CX Series - User ManualDocument87 pagesAutonics CX Series - User ManualEldglay da Silva DomingosNo ratings yet
- DC-DC ConvertersDocument30 pagesDC-DC ConvertersTema HassanNo ratings yet
- CP 653 BA Technical-information-ASSET-DOC-LOC-1540979Document1 pageCP 653 BA Technical-information-ASSET-DOC-LOC-1540979AdityaNo ratings yet