You might also like
- ANSI B11 Standards Safety of Machinery Group 1 1Document4 pagesANSI B11 Standards Safety of Machinery Group 1 1Chris Jhon HalinaNo ratings yet
- UGRD-GE6114 Mathematics in The Modern World ANSWERDocument12 pagesUGRD-GE6114 Mathematics in The Modern World ANSWERJoice Barandon92% (12)
- YaDocument4 pagesYabroscuta23No ratings yet
- Risk AssessmentDocument37 pagesRisk AssessmentArshadNo ratings yet
- Standards Update Notice (Sun) ISSUED: July 8, 2020Document3 pagesStandards Update Notice (Sun) ISSUED: July 8, 2020jklelvis100% (1)
- 3 - Industrial Mobile Robots Safety Standard UpdateDocument35 pages3 - Industrial Mobile Robots Safety Standard Update.adtmmal100% (1)
- Fall Protection ANSIDocument5 pagesFall Protection ANSIsejudavisNo ratings yet
- UL 583 UL 558: UL 583 Safety Rated TrucksDocument6 pagesUL 583 UL 558: UL 583 Safety Rated TrucksC.N. KrishnaNo ratings yet
- Software Engineering: Architecture-driven Software DevelopmentFrom EverandSoftware Engineering: Architecture-driven Software DevelopmentRating: 4.5 out of 5 stars4.5/5 (6)
- Robot Safety Standard Update: Roberta Nelson SheaDocument43 pagesRobot Safety Standard Update: Roberta Nelson SheaudbarryNo ratings yet
- Bulletin 2016 04ENG ULC S525 S526 S541Document2 pagesBulletin 2016 04ENG ULC S525 S526 S541Irfan SyukranNo ratings yet
- Robots SafetyDocument58 pagesRobots SafetyHIRWA YVAN MVUNABONo ratings yet
- Robot and Robot SystemsDocument5 pagesRobot and Robot SystemsLuis MurilloNo ratings yet
- Harness and Lanyard Inspection Training AidDocument19 pagesHarness and Lanyard Inspection Training AidBernhard von MuehlenenNo ratings yet
- UL Standardes Seguridad MaquinasDocument19 pagesUL Standardes Seguridad MaquinasSergioNo ratings yet
- Ensuring Seismic Safety Trough Properly Specified AnchoringDocument59 pagesEnsuring Seismic Safety Trough Properly Specified AnchoringStelian ConstantinescuNo ratings yet
- Nfpa 780Document4 pagesNfpa 780Andres Chazi Solis0% (1)
- ANSI Fall Protection Standards WebDocument8 pagesANSI Fall Protection Standards WebMohamedSaidNo ratings yet
- 1 - Practical Application of Robot SafetyDocument68 pages1 - Practical Application of Robot Safetydavev2005100% (1)
- Application Flow Chart (UL Certification)Document1 pageApplication Flow Chart (UL Certification)vintecomNo ratings yet
- ANSI/ASSP Z359.1-2020: The Fall Protection CodeDocument32 pagesANSI/ASSP Z359.1-2020: The Fall Protection Codearnoldbatista55No ratings yet
- BS 362 ConnectorDocument20 pagesBS 362 ConnectorAndreas SchlagerNo ratings yet
- Ics 8 2012 Ready To Publish WatermarkedDocument111 pagesIcs 8 2012 Ready To Publish WatermarkedJesus SalazarNo ratings yet
- Eia 632Document138 pagesEia 632Edward KernNo ratings yet
- Engineering Operating Guide DOWFROSTDocument44 pagesEngineering Operating Guide DOWFROSTcarlone07No ratings yet
- Astm F1506-22 PDFDocument12 pagesAstm F1506-22 PDFEnrique Valdez ArévaloNo ratings yet
- DRAFT ANSI Z535.5-2016 DraftDocument39 pagesDRAFT ANSI Z535.5-2016 DraftAJDNo ratings yet
- BienDocument25 pagesBienAlfredo VSNo ratings yet
- Air Transport Association 2014Document34 pagesAir Transport Association 2014Guillermo SanchezNo ratings yet
- Ansiasse Z359.0-2012Document40 pagesAnsiasse Z359.0-2012Ingrid FigueredoNo ratings yet
- 'Fixed Ladders, Design, Inspection, and Use PDFDocument29 pages'Fixed Ladders, Design, Inspection, and Use PDFYongki Adi Pratama PutraNo ratings yet
- CE Certificate PDFDocument2 pagesCE Certificate PDFErik ChavezNo ratings yet
- PreviewDocument10 pagesPreview최재호No ratings yet
- Merican Ational TandardDocument64 pagesMerican Ational TandardKannan JaganNo ratings yet
- Standard For TestingDocument2 pagesStandard For TestingdsathiyaNo ratings yet
- Standardcsa Platform b354!2!2001 r2006Document3 pagesStandardcsa Platform b354!2!2001 r2006nodolaemailNo ratings yet
- An Overview of The Ansi Z359 Fall Protection Code: FEBRUARY 16, 2018Document24 pagesAn Overview of The Ansi Z359 Fall Protection Code: FEBRUARY 16, 2018isabel Cristina Agresott TorresNo ratings yet
- The Risk Reduction Process Utilizing A Hierarchy of ControlsDocument11 pagesThe Risk Reduction Process Utilizing A Hierarchy of ControlsZélia OrnelasNo ratings yet
- Certificate of Compliance: Certificate Number Report Reference Issue DateDocument3 pagesCertificate of Compliance: Certificate Number Report Reference Issue DatefelipeNo ratings yet
- Ansi Z535.3-2002Document64 pagesAnsi Z535.3-2002Leonardo Nicolás Nieto SierraNo ratings yet
- Robot Safety Overview of Risk Assessment and Reduction 2168 9695 1000139Document5 pagesRobot Safety Overview of Risk Assessment and Reduction 2168 9695 1000139Isaac FaratyNo ratings yet
- How Safe Are Products Bearing The UL Mark?Document5 pagesHow Safe Are Products Bearing The UL Mark?The World Fire Safety Foundation100% (1)
- Ansi A117 1 1998Document102 pagesAnsi A117 1 1998Lucky KhanNo ratings yet
- Lewis Barbe: Committee E34 On Occupational Health and SafetyDocument6 pagesLewis Barbe: Committee E34 On Occupational Health and SafetyLewis BarbeNo ratings yet
- Robot Safety Standard Documents - AutomateDocument1 pageRobot Safety Standard Documents - AutomateJAVIER ZAVALANo ratings yet
- Robot Standards ListDocument5 pagesRobot Standards Listmalik faisal bin khairuddinNo ratings yet
- Children's Folding Chairs: Standard Consumer Safety Specification ForDocument5 pagesChildren's Folding Chairs: Standard Consumer Safety Specification ForAhmad Zubair Rasuly100% (1)
- Tieu Chuan AS 4084-1993Document44 pagesTieu Chuan AS 4084-1993Huy Nguyen VanNo ratings yet
- Ansi Saia A92 5 2006 R2014 Boom Supported Elevating Work Platforms 1 PDFDocument44 pagesAnsi Saia A92 5 2006 R2014 Boom Supported Elevating Work Platforms 1 PDFLuis Carcamo MartinezNo ratings yet
- Iso 10325 2018Document9 pagesIso 10325 2018Julio Andrés Casal Ramos0% (1)
- Steel Storage Rack Correction ListDocument3 pagesSteel Storage Rack Correction Listsmartcad60No ratings yet
- Key Changes: Increased For Snaphooks and CarabinDocument7 pagesKey Changes: Increased For Snaphooks and CarabinJamesNo ratings yet
- Pos Safeguards Plant and Machinery 1004642-EN-03Document1 pagePos Safeguards Plant and Machinery 1004642-EN-03micros zenerNo ratings yet
- Ul857 Aluminium Busbar CatalogueDocument20 pagesUl857 Aluminium Busbar CatalogueMichael Camit Eso100% (1)
- ANSI Z308.1-2009 (First Aid Kits)Document15 pagesANSI Z308.1-2009 (First Aid Kits)Jeff100% (2)
- New Twer Safety OkDocument86 pagesNew Twer Safety OkMuhammad ImtiazNo ratings yet
- Ansi B11.8-2001 (R2007)Document55 pagesAnsi B11.8-2001 (R2007)MohammedNo ratings yet
- 1910.66 Osha PDFDocument35 pages1910.66 Osha PDFluiseduardo_plcNo ratings yet
- The New ANSI Z359.18-2017 Anchorage Connector Standard: HistoryDocument3 pagesThe New ANSI Z359.18-2017 Anchorage Connector Standard: HistoryParameshwaran NairNo ratings yet
- Software Processand Product ISOStandards A3Document16 pagesSoftware Processand Product ISOStandards A3Trưởng Ngô VănNo ratings yet
- CLAWAR08 Virk Moon Gelin CameraReadyDocument7 pagesCLAWAR08 Virk Moon Gelin CameraReadyMurat CanNo ratings yet
- 06 - Graham Bleakley Part 2Document12 pages06 - Graham Bleakley Part 2rihabNo ratings yet
- de So 14Document5 pagesde So 14Gia HuyNo ratings yet
- Earth Science Q2 Week 5 - REFINED - EDITEDDocument18 pagesEarth Science Q2 Week 5 - REFINED - EDITEDCharijoy FriasNo ratings yet
- University of Mindanao: Master in Environmental PlanningDocument48 pagesUniversity of Mindanao: Master in Environmental PlanningAbdulbady MandugayNo ratings yet
- SAMSON Elektropneumatski Pozicioner Tip 4763Document8 pagesSAMSON Elektropneumatski Pozicioner Tip 4763Bojan DimitrijevicNo ratings yet
- Ethics FinalDocument6 pagesEthics FinalMd.AshikuzzamanNo ratings yet
- Lucas-Ackerman Et Al. (2019) - Re-Os - TamilNadu - Carbonatites - EPSLpdfDocument13 pagesLucas-Ackerman Et Al. (2019) - Re-Os - TamilNadu - Carbonatites - EPSLpdfAbhinav PandeyNo ratings yet
- Multiple Choice Questions of Electric Current and OhmDocument11 pagesMultiple Choice Questions of Electric Current and OhmVanaVihari DasNo ratings yet
- Human Figures: NID / NIFT / CEPT / NATA Entrance Coaching ClassesDocument11 pagesHuman Figures: NID / NIFT / CEPT / NATA Entrance Coaching ClassesSameeksha H VivekNo ratings yet
- Iso 8686-1Document34 pagesIso 8686-1Matllan100% (1)
- Internet of Things (A Hands-on-Approach)Document7 pagesInternet of Things (A Hands-on-Approach)Art and craft libraryNo ratings yet
- Demonstratrion Method by MinoDocument30 pagesDemonstratrion Method by MinoAncilinNo ratings yet
- Uganda Super CerealDocument23 pagesUganda Super CerealLeidys Pérez SerpaNo ratings yet
- C Value ParadoxDocument18 pagesC Value ParadoxKashish GuptaNo ratings yet
- ACS - Question BankDocument4 pagesACS - Question BankMeghana PinkyNo ratings yet
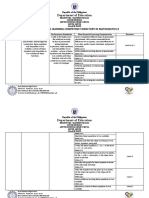
- Math 8 Contextualized Learning Competency DirectoryDocument23 pagesMath 8 Contextualized Learning Competency DirectoryMONA LEE TONACAONo ratings yet
- Iron Sucrose Inj 21135 RV11-13Document2 pagesIron Sucrose Inj 21135 RV11-13HarshaNo ratings yet
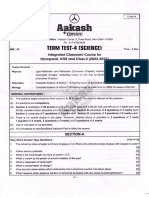
- Term Test-04 Science CBSEDocument6 pagesTerm Test-04 Science CBSEPriyansh PrakashNo ratings yet
- Icar JRF Agricultural Economics 2021Document61 pagesIcar JRF Agricultural Economics 2021Saurabh PatilNo ratings yet
- A Preliminary Investigation Into The Hydrology of The Jackson/Frazier Wetland, OregonDocument54 pagesA Preliminary Investigation Into The Hydrology of The Jackson/Frazier Wetland, OregonNoah SolomonNo ratings yet
- Hancock County Needs Assessment 1Document20 pagesHancock County Needs Assessment 1api-622005669No ratings yet
- Ethical ImplicationsDocument39 pagesEthical ImplicationsChristo ChristoffNo ratings yet
- HISTORY MergedDocument53 pagesHISTORY MergedBlue eyes India kiNo ratings yet
- Why Formal Links Are Not EnoughDocument24 pagesWhy Formal Links Are Not EnoughvuphuonglinhNo ratings yet
- Dillet, Benoît - During, Elie - Stiegler, Bernard - Philosophising by Accident - Interviews With Élie During-Edinburgh University Press (2017)Document133 pagesDillet, Benoît - During, Elie - Stiegler, Bernard - Philosophising by Accident - Interviews With Élie During-Edinburgh University Press (2017)Leandro Carmelini100% (1)
- Introduction and Types of PersonalityDocument17 pagesIntroduction and Types of PersonalityVikash kumarNo ratings yet
- EDIP End Line Evaluation ReportDocument89 pagesEDIP End Line Evaluation ReportRafiq JafferNo ratings yet
- Instant download pdf Optics 5th Edition Hecht Solutions Manual full chapterDocument33 pagesInstant download pdf Optics 5th Edition Hecht Solutions Manual full chaptermuimbalkahla100% (4)
- Answers CallisterDocument18 pagesAnswers CallisterSindyNo ratings yet