You might also like
- 13 Freq Response AICDocument84 pages13 Freq Response AICDavid BayuNo ratings yet
- Topic 3-Part 2-Frequency ResponseDocument54 pagesTopic 3-Part 2-Frequency ResponseBautista, Aljhon G.No ratings yet
- Topic 4. Frequency ResponseDocument9 pagesTopic 4. Frequency ResponseFadzai FunguraNo ratings yet
- Math 4Document23 pagesMath 4Anonymous UrzdtCB0INo ratings yet
- System Compensation AND Root Locus MethodDocument19 pagesSystem Compensation AND Root Locus MethodRolando ArcegaNo ratings yet
- Arijit Nath - Bode PlotDocument6 pagesArijit Nath - Bode PlotTry meNo ratings yet
- Frequency Response Analysis: Submitted By, N.Aravindh M.Tech (Chemical Engg)Document29 pagesFrequency Response Analysis: Submitted By, N.Aravindh M.Tech (Chemical Engg)Aravindh NatarajanNo ratings yet
- 2 Muhammad RehanDocument7 pages2 Muhammad Rehanengrzee5516No ratings yet
- CASERES - CoNTROL LABDocument6 pagesCASERES - CoNTROL LABVan Eldridge Kyle CaseresNo ratings yet
- B - Lecture14 Stability in The Frequency Domain and Relative Stability Automatic Control SystemDocument16 pagesB - Lecture14 Stability in The Frequency Domain and Relative Stability Automatic Control SystemAbaziz Mousa OutlawZzNo ratings yet
- EP 5511 - Lecture 07Document33 pagesEP 5511 - Lecture 07Solomon Tadesse AthlawNo ratings yet
- Lecture 9-10 - Frequency Response MethodsDocument68 pagesLecture 9-10 - Frequency Response MethodsDerrick Maatla Moadi100% (1)
- علي احمد جباره تقرير تقرير مختبر الكونترولDocument6 pagesعلي احمد جباره تقرير تقرير مختبر الكونترولسيد نعيمNo ratings yet
- Electrical Engineering Engineering Control Systems Stability in The Frequency Domain NotesDocument13 pagesElectrical Engineering Engineering Control Systems Stability in The Frequency Domain NotesSwapnil Gade007No ratings yet
- Control Systems Engineering - U6Document50 pagesControl Systems Engineering - U6BabuNo ratings yet
- Gate Control QuestionsDocument4 pagesGate Control QuestionsAtanuMajiNo ratings yet
- Controlengg Compiled Sridar (Session 1 8)Document60 pagesControlengg Compiled Sridar (Session 1 8)Prem T RajuNo ratings yet
- Ee 58 Ce BenDocument17 pagesEe 58 Ce BenSaberish Kumar ANo ratings yet
- Control SystemsDocument13 pagesControl SystemsEswaran100% (1)
- Ic1251 Control SystemsDocument14 pagesIc1251 Control SystemscsdtgrNo ratings yet
- Chapter 6slideDocument72 pagesChapter 6slidehailegebreselassie24No ratings yet
- Sapiandante, Goran Y. 24 Group 8 ECE131L/B1Document3 pagesSapiandante, Goran Y. 24 Group 8 ECE131L/B1Goran SapiandanteNo ratings yet
- Lab 5 ControlDocument6 pagesLab 5 ControlAyaz AhmadNo ratings yet
- Cs ImpDocument5 pagesCs ImpLiki LikithNo ratings yet
- Block Diagrams - Lecture NotesDocument8 pagesBlock Diagrams - Lecture NotesMichael HsiaoNo ratings yet
- AN535 Phase Lock Loop Design FundamentalsDocument13 pagesAN535 Phase Lock Loop Design FundamentalsfahkingmoronNo ratings yet
- Lecture 1 - Frequency ResponseDocument19 pagesLecture 1 - Frequency ResponseShanneyNo ratings yet
- Whatis Frequency Response?Document32 pagesWhatis Frequency Response?Arshiya Kousar MNo ratings yet
- Control SystemDocument20 pagesControl SystemRakesh Kumar DNo ratings yet
- CS Unit-3Document16 pagesCS Unit-3auchthram143No ratings yet
- Control System PPKDocument13 pagesControl System PPKP Praveen KumarNo ratings yet
- Polar Plot, Nyquist PlotDocument19 pagesPolar Plot, Nyquist PlotSirshendu100% (1)
- Ghosh, D. P., 1971, Inverse Filter Coefficients For The Computation of Apparent Resistivity Standard Curves For A Horizontally Stratified EarthDocument7 pagesGhosh, D. P., 1971, Inverse Filter Coefficients For The Computation of Apparent Resistivity Standard Curves For A Horizontally Stratified EarthCinthia MtzNo ratings yet
- Control Engg NotesDocument58 pagesControl Engg NotesTudor Octavian RusuNo ratings yet
- Expt 6 Frequency and StabilityDocument4 pagesExpt 6 Frequency and StabilityJHUSTINE CAÑETENo ratings yet
- Design of Anti-Windup-Extensions For Digital Control LoopsDocument6 pagesDesign of Anti-Windup-Extensions For Digital Control Loopsfrank_grimesNo ratings yet
- Week 10 - Block Diagram ReductionDocument34 pagesWeek 10 - Block Diagram ReductionizmiNo ratings yet
- AppendixDocument16 pagesAppendixSushant YadavNo ratings yet
- Time & Frequency Response of The System Using MATLAB: SoftwareDocument9 pagesTime & Frequency Response of The System Using MATLAB: SoftwareVenkatesh KumarNo ratings yet
- Pole-Zero-Gain Filters: Chapter InsightDocument13 pagesPole-Zero-Gain Filters: Chapter InsightAldon JimenezNo ratings yet
- CS 16 MARK Unit 5 OnlyDocument6 pagesCS 16 MARK Unit 5 OnlySaravana KumarNo ratings yet
- Control Systems Questions For GATE, IES, PSU and Other Central and State Competitive ExamsDocument11 pagesControl Systems Questions For GATE, IES, PSU and Other Central and State Competitive Examssrinu247No ratings yet
- Parameter Sensitivity and State-Space Trajectories: Chap. 13Document16 pagesParameter Sensitivity and State-Space Trajectories: Chap. 13Sh GhNo ratings yet
- R(S) C(S)Document16 pagesR(S) C(S)Ananthan SrijithNo ratings yet
- Frequency Domain Analysis and Stability DeterminationDocument35 pagesFrequency Domain Analysis and Stability Determination19R25A0411 SUDAMSETTI NIKHILANo ratings yet
- EXP8 Frequencyresponse StudentsDocument4 pagesEXP8 Frequencyresponse StudentslucasNo ratings yet
- IAT SolutionsDocument13 pagesIAT Solutionsjay mehtaNo ratings yet
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsFrom EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNo ratings yet
- DSP Lab Expt 3 EECE GITAM-19-23Document5 pagesDSP Lab Expt 3 EECE GITAM-19-23gowri thumburNo ratings yet
- Bode PlotDocument22 pagesBode PlotEr Akhilesh SinghNo ratings yet
- Fall 2010 Control Systems (EEE 226) Unit-3 Frequency Response Analysis Faculty: Ramesh Babu. NDocument40 pagesFall 2010 Control Systems (EEE 226) Unit-3 Frequency Response Analysis Faculty: Ramesh Babu. NVijay IndukuriNo ratings yet
- Notes-Nyquist Plot and Stability CriteriaDocument16 pagesNotes-Nyquist Plot and Stability CriteriaGanesh RadharamNo ratings yet
- Control of Inverted PendulumDocument5 pagesControl of Inverted PendulumalfredccNo ratings yet
- Harnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingFrom EverandHarnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Xpac 2004 Release NotesDocument11 pagesXpac 2004 Release NotesAgustinus YosefNo ratings yet
- Best Lesson PlanDocument4 pagesBest Lesson Planapi-398545121No ratings yet
- Stilo Servo Electric PDFDocument7 pagesStilo Servo Electric PDFManu Alex100% (1)
- Model Based System Identification For Hydraulic Deep Drawing PressesDocument11 pagesModel Based System Identification For Hydraulic Deep Drawing PressesjordanNo ratings yet
- Book 5: Magnetcode For 2-Axis Robot ArmDocument41 pagesBook 5: Magnetcode For 2-Axis Robot ArmHusna AdilaNo ratings yet
- Ideapad 330 15intel Platform SpecificationsDocument1 pageIdeapad 330 15intel Platform Specificationslegatus2yahoo.grNo ratings yet
- 161-Gyro IXblue Quadrans User Manual 1-10-2014Document31 pages161-Gyro IXblue Quadrans User Manual 1-10-2014Jean-Guy PaulNo ratings yet
- Overproduction MUDADocument1 pageOverproduction MUDARaza HasanNo ratings yet
- ECT Checking PDFDocument11 pagesECT Checking PDFEdidjo DarwinNo ratings yet
- List of Mobile Phones Supported OTG Function PDFDocument7 pagesList of Mobile Phones Supported OTG Function PDFCarlos Manuel De Los Santos PerezNo ratings yet
- KingDocument13 pagesKingiven pterNo ratings yet
- Lightning DetectionDocument2 pagesLightning Detectionpemanr1914No ratings yet
- Computer Basics: What Is An Application?Document4 pagesComputer Basics: What Is An Application?Ser Crz JyNo ratings yet
- DB and DT Series Mam PLC ManualDocument20 pagesDB and DT Series Mam PLC ManualAdolf MutangaduraNo ratings yet
- Schneider Electric Price List Feb 2020 V2Document478 pagesSchneider Electric Price List Feb 2020 V2Amr SohilNo ratings yet
- Absensi Kelas Xii 2020-2021Document28 pagesAbsensi Kelas Xii 2020-2021Anastasya NanggoNo ratings yet
- Skype For Business Server 2015 - Kickoff PresentationDocument15 pagesSkype For Business Server 2015 - Kickoff PresentationItw UttNo ratings yet
- Index in OLap DataDocument11 pagesIndex in OLap Datashikhagupta3288No ratings yet
- Ground Investigation - Pre-Drilling at MTR Protection ZoneDocument26 pagesGround Investigation - Pre-Drilling at MTR Protection ZoneMan Ho LamNo ratings yet
- TeSys LT3 - LT3SA00EDDocument2 pagesTeSys LT3 - LT3SA00EDVincent Ferrer NironNo ratings yet
- EAS6800+ High Quality Composite Video Encoder/Synchronizer and Analog Audio DemultiplexerDocument90 pagesEAS6800+ High Quality Composite Video Encoder/Synchronizer and Analog Audio DemultiplexerTechne PhobosNo ratings yet
- Proposal Project PrintingDocument13 pagesProposal Project PrintinglodewNo ratings yet
- HRB754Document2 pagesHRB754عبدالله رحيمNo ratings yet
- Abstract ClassDocument15 pagesAbstract ClassSachin IgoorNo ratings yet
- General Format Purdue Writing LabDocument1 pageGeneral Format Purdue Writing LabAriana QuilesNo ratings yet
- Ict Applications - Satellite Systems: Grade 10Document16 pagesIct Applications - Satellite Systems: Grade 10ruhiyaNo ratings yet
- Telecom CaseStudy TCS Enhances Customer Service Hutchison 3G Austria 06 2011Document4 pagesTelecom CaseStudy TCS Enhances Customer Service Hutchison 3G Austria 06 2011Kazim DafedarNo ratings yet
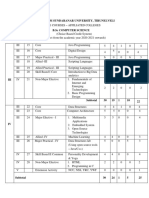
- B.SC Computer Science 2020-2021 SylabusDocument67 pagesB.SC Computer Science 2020-2021 SylabusKrithika SKNo ratings yet
- Shraddha Udawant A-58-1Document17 pagesShraddha Udawant A-58-1G-20 Papai ShahaNo ratings yet