Elements of
Analytical
Photogrammetry
EXTERIOR ORIENTATION
�Exterior Orientation
It is the relationship between the image and object space. This
is accomplished by determining the camera position in the object
coordinate system. The camera position is determined by the
location of its perspective center and by its altitude, expressed
by three independent angles.
The angular or rotational elements of exterior orientation
describe the relationship between the ground space coordinate
system (X, Y, and Z) and the image space coordinate system (x,
y, and z)
�Exterior Orientation Parameters
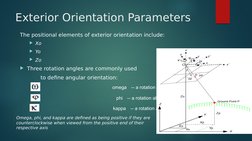
The positional elements of exterior orientation include:
Xo
Yo
Zo
Three rotation angles are commonly used
to define angular orientation:
omega -- a rotation about the photographic x-axis
phi -- a rotation about the photographic y-axis
kappa -- a rotation about the photographic z-axis
Omega, phi, and kappa are defined as being positive if they are
counterclockwise when viewed from the positive end of their
respective axis
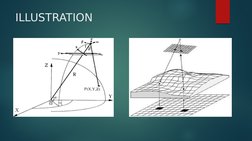
�ILLUSTRATION
�Exterior Orientation Parameters
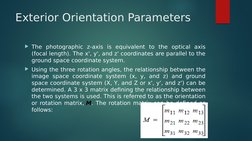
The photographic z-axis is equivalent to the optical axis
(focal length). The x', y', and z' coordinates are parallel to the
ground space coordinate system.
Using the three rotation angles, the relationship between the
image space coordinate system (x, y, and z) and ground
space coordinate system (X, Y, and Z or x', y', and z') can be
determined. A 3 x 3 matrix defining the relationship between
the two systems is used. This is referred to as the orientation
or rotation matrix,M. The rotation matrix can be defined as
follows:
�Exterior Orientation Parameters
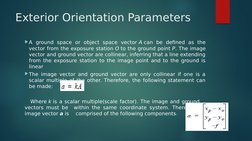
A
ground space or object space vectorAcan be defined as the
vector from the exposure stationOto the ground pointP. The image
vector and ground vector are collinear, inferring that a line extending
from the exposure station to the image point and to the ground is
linear
The
image vector and ground vector are only collinear if one is a
scalar multiple of the other. Therefore, the following statement can
be made:
Wherekis a scalar multiple(scale factor). The image and ground
vectors must be within the same coordinate system. Therefore,
image vectorais comprised of the following components :
�Exterior Orientation Parameters
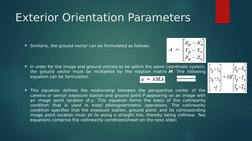
Similarly, the ground vector can be formulated as follows:
In order for the image and ground vectors to be within the same coordinate system,
the ground vector must be multiplied by the rotation matrixM. The following
equation can be formulated:
This equation defines the relationship between the perspective center of the
camera or sensor exposure station and ground pointPappearing on an image with
an image point location ofp. This equation forms the basis of the collinearity
condition that is used in most photogrammetric operations. The collinearity
condition specifies that the exposure station, ground point, and its corresponding
image point location must all lie along a straight line, thereby being collinear. Two
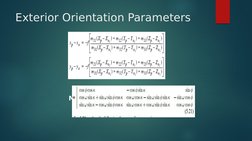
equations comprise the collinearity condition(shown on the next slide).
�Exterior Orientation Parameters
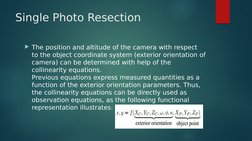
�Single Photo Resection
The position and altitude of the camera with respect
to the object coordinate system (exterior orientation of
camera) can be determined with help of the
collinearity equations.
Previous equations express measured quantities as a
function of the exterior orientation parameters. Thus,
the collinearity equations can be directly used as
observation equations, as the following functional
representation illustrates:
�Single Photo Resection
The single-photo resection (SPR)has been a fundamental
task
in many photogmmmetric, remote sensing, and computer
vision applications. The objective of the SPR is to determine
the position of the perspective center and the orientation of
the image coordinate system relative to the ground
coordinate
system (i.e., establish the exterior orientation pammeters, or
EOP). In traditionalphotogrammetrictechniques, this problem
is solved using 2D image point to 3D object point
correspondence.
�Computing Photo Coordinates
With known exterior orientation elements
photo-coordinates can be easily computed
from the equations(slide 8). This is useful for
simulation studies where synthetic photo
coordinates
are
computed.
Another application for the direct use of the
collinearity equations is the real-time
loop of analytical plotters where photocoordinates of ground points or model points
are computed after relative or absolute
orientation (see next chapter, analytical
plotters)