You might also like
- Lecture3 PrinciplesofStereoscopicVisionDocument87 pagesLecture3 PrinciplesofStereoscopicVisionJulca Gonza MelissaNo ratings yet
- Lecture 3-1 - Geometry of A Vertical Aerial PhotographDocument44 pagesLecture 3-1 - Geometry of A Vertical Aerial PhotographFaisel mohammedNo ratings yet
- GEO 2204: Photogrammetry I: Magemeso IbrahimDocument93 pagesGEO 2204: Photogrammetry I: Magemeso IbrahimKarungi AroneNo ratings yet
- Chapter 1. Introduction: 1.1 Definition of PhotogrammetryDocument7 pagesChapter 1. Introduction: 1.1 Definition of Photogrammetrybajoel ijoNo ratings yet
- Use and Interpretation of Aerial Photographs - I: Lecture OutlineDocument12 pagesUse and Interpretation of Aerial Photographs - I: Lecture OutlineCEO DimejiNo ratings yet
- Stereoscopy and PhotogrammetryDocument7 pagesStereoscopy and PhotogrammetrymadhuspatitripathyNo ratings yet
- Photogeology Remote and GIS Lecture Material Aduah StudentDocument81 pagesPhotogeology Remote and GIS Lecture Material Aduah StudentFrankin Ocran100% (1)
- Stereo tr2Document27 pagesStereo tr2ravindu deshithaNo ratings yet
- Report 1 (Photogrammetry)Document8 pagesReport 1 (Photogrammetry)Maizatul ZafirahNo ratings yet
- Calibration of Fish-Eye Stereo Camera For Aurora ObservationDocument6 pagesCalibration of Fish-Eye Stereo Camera For Aurora ObservationZikang XieNo ratings yet
- Ce 321 2 Photogrammetry 1Document73 pagesCe 321 2 Photogrammetry 1Shubham BansalNo ratings yet
- Photo Geology Final PDFDocument101 pagesPhoto Geology Final PDFGlobal CopyNo ratings yet
- Vision Por ComputadoraDocument14 pagesVision Por ComputadoraMatthew DorseyNo ratings yet
- Aerial Photogrammetry: Presented by Scholar NoDocument34 pagesAerial Photogrammetry: Presented by Scholar Norajat pandeyNo ratings yet
- Photogrammetry: What IsDocument9 pagesPhotogrammetry: What IsJairos ShinzehNo ratings yet
- SchneiderKreuznach Optical Measurement Techniques With Telecentric LensesDocument61 pagesSchneiderKreuznach Optical Measurement Techniques With Telecentric Lenseswavelet5No ratings yet
- Photoframmetry SupplementDocument4 pagesPhotoframmetry SupplementBreeNo ratings yet
- Photogrammetry 21.10.2022Document33 pagesPhotogrammetry 21.10.2022Guru MurthyNo ratings yet
- Laboratory E Thin Lenses: Physics 111: Elementary PhysicsDocument8 pagesLaboratory E Thin Lenses: Physics 111: Elementary PhysicsCraigNo ratings yet
- Kuliah 6 Geometri Foto UdaraDocument106 pagesKuliah 6 Geometri Foto UdaraMuhammad WildanNo ratings yet
- Calibration of Fish-Eye Stereo Camera For Aurora ObservationDocument6 pagesCalibration of Fish-Eye Stereo Camera For Aurora ObservationZikang XieNo ratings yet
- Basic Principles of PhotogrammetryDocument72 pagesBasic Principles of PhotogrammetryMehmet YILMAZNo ratings yet
- Basic Concepts of Orthorectification: Photogrammetry Assignment ReportDocument11 pagesBasic Concepts of Orthorectification: Photogrammetry Assignment ReportCecep Zhebra CrossNo ratings yet
- Northern Technical University Technical College of Kirkuk: Third Stage Photogrammetry IIDocument19 pagesNorthern Technical University Technical College of Kirkuk: Third Stage Photogrammetry IIهیوا حسینNo ratings yet
- Stereoscopy and Stereoscopic ViewingDocument3 pagesStereoscopy and Stereoscopic ViewingEbenezer MatopeNo ratings yet
- Geometrical Optics - ManualDocument9 pagesGeometrical Optics - ManualfarehaNo ratings yet
- Photogrammetry: Definitions Aerial Photogrammetry Terrestrial PhotogrammetryDocument46 pagesPhotogrammetry: Definitions Aerial Photogrammetry Terrestrial Photogrammetrypaul macharia100% (1)
- PhotogrammetryDocument33 pagesPhotogrammetryfirosekhan100% (1)
- Lecture 1 - Photogrammetry IntroductionDocument21 pagesLecture 1 - Photogrammetry IntroductionFaisel mohammedNo ratings yet
- SPECT Bruyant PDFDocument16 pagesSPECT Bruyant PDFVlad Alexandru SanduNo ratings yet
- Activity 5 PhotogDocument6 pagesActivity 5 PhotogShizuko Daen LabandaNo ratings yet
- StereosDocument9 pagesStereosRajan TiwariNo ratings yet
- Photogrammetry - Aerial Photography and Procedure in SurveyingDocument8 pagesPhotogrammetry - Aerial Photography and Procedure in Surveyingvenkateswara rao PothinaNo ratings yet
- Module1 PDFDocument132 pagesModule1 PDFbhjkNo ratings yet
- Self Calibration of Small and Medium Format Digital CamerasDocument6 pagesSelf Calibration of Small and Medium Format Digital CamerasOke Joko HaniloNo ratings yet
- Photogram Me TryDocument46 pagesPhotogram Me Trypaul macharia100% (1)
- Basic Mathematics of PhotogrammetryDocument15 pagesBasic Mathematics of PhotogrammetrySweet brownNo ratings yet
- Projectile Orientation Measurement During Flight and Just Before Impact - Isb 2016Document10 pagesProjectile Orientation Measurement During Flight and Just Before Impact - Isb 2016Andre DiederenNo ratings yet
- Scanning Pentaprism Measurements of Off-Axis Aspherics - 2008Document10 pagesScanning Pentaprism Measurements of Off-Axis Aspherics - 2008kndprasad01No ratings yet
- Photogrammetry Mathematics 080116Document128 pagesPhotogrammetry Mathematics 080116firosekhan100% (2)
- Lens Light: in Barrel Distortion, Straight Lines Bulge Outwards at The Center, As in ADocument7 pagesLens Light: in Barrel Distortion, Straight Lines Bulge Outwards at The Center, As in AFaseela HarshadNo ratings yet
- Geometric OpticsDocument8 pagesGeometric OpticsSerge Mandhev SwamotzNo ratings yet
- Lecture 04Document35 pagesLecture 04abdul basitNo ratings yet
- Experiment 3 - Prism SpectrometerDocument6 pagesExperiment 3 - Prism SpectrometerTATENDA GOTONo ratings yet
- Chapter One Branches of PhotogrammetryDocument30 pagesChapter One Branches of Photogrammetryhaile akelokNo ratings yet
- CHAPTER 4 PhotogrammetryDocument48 pagesCHAPTER 4 Photogrammetryaduyekirkosu1scribdNo ratings yet
- Seminar ReportDocument15 pagesSeminar Reportrajat pandeyNo ratings yet
- The Cephalographic Projection: Part II. Principles of Image Distortion in CephalographyDocument8 pagesThe Cephalographic Projection: Part II. Principles of Image Distortion in CephalographyNeeraj AroraNo ratings yet
- The Cephalographic Projection: Part II. Principles of Image Distortion in CephalographyDocument8 pagesThe Cephalographic Projection: Part II. Principles of Image Distortion in CephalographyNeeraj AroraNo ratings yet
- NCERT Class 11 Geography Introduction To Aerial PhotographsDocument15 pagesNCERT Class 11 Geography Introduction To Aerial PhotographsSatya Chandra PernidiNo ratings yet
- First Order Optics: Jordan JurDocument13 pagesFirst Order Optics: Jordan Jurlolopopo28No ratings yet
- Catadioptric NeverDocument31 pagesCatadioptric Nevermaqsoodalam20063068No ratings yet
- Bio595r Ia4Document49 pagesBio595r Ia4Tophiro TUGUMENo ratings yet
- We Have Learnt: Today's ObjectiveDocument10 pagesWe Have Learnt: Today's ObjectiveVladimir MoroteNo ratings yet
- Photogrammetry Mathematics 080116Document128 pagesPhotogrammetry Mathematics 080116Ken Lim100% (1)
- Articol Simpozion-Corectat PartialDocument6 pagesArticol Simpozion-Corectat PartialAlexandru AnaNo ratings yet
- 3rd Term s2 PhysicsDocument25 pages3rd Term s2 PhysicsHASSAN MUH'D BELLONo ratings yet
- TD - Orthographic ProjectionDocument28 pagesTD - Orthographic ProjectionIijjNo ratings yet
- Lecture 3-3 - Geometry of A Vertical Aerial PhotographDocument39 pagesLecture 3-3 - Geometry of A Vertical Aerial PhotographFaisel mohammedNo ratings yet
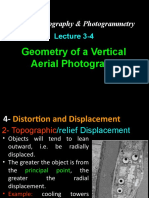
- Lecture 3-4 - Geometry of A Vertical Aerial PhotographDocument35 pagesLecture 3-4 - Geometry of A Vertical Aerial PhotographFaisel mohammedNo ratings yet
- Lecture 3-2 - Geometry of A Vertical Aerial PhotographDocument29 pagesLecture 3-2 - Geometry of A Vertical Aerial PhotographFaisel mohammedNo ratings yet
- Lecture 2 - Aerial PhotographyDocument39 pagesLecture 2 - Aerial PhotographyFaisel mohammedNo ratings yet
- Morphological Image ProcessingDocument8 pagesMorphological Image ProcessingVictor Leal100% (1)
- How To Critique A Photograph - Facebook PDFDocument1 pageHow To Critique A Photograph - Facebook PDFpeterNo ratings yet
- Philips Achiva 3t Mri MachineDocument2 pagesPhilips Achiva 3t Mri MachineZTB NguyenNo ratings yet
- CHDK Quick Start User Guide - BookletDocument38 pagesCHDK Quick Start User Guide - BookletVince VazquezNo ratings yet
- Forensic Photography Concepts and Applications For Better Crime Scene ExaminationDocument6 pagesForensic Photography Concepts and Applications For Better Crime Scene ExaminationJonathan Dantas PessoaNo ratings yet
- Interchangeable Camera System: Ultra High-Speed, Multi-Camera, High-Performance Image Processing SystemDocument16 pagesInterchangeable Camera System: Ultra High-Speed, Multi-Camera, High-Performance Image Processing SystemAbdou DENo ratings yet
- Type-2 Fuzzy Set Based Multimodal Medical Image FusionDocument4 pagesType-2 Fuzzy Set Based Multimodal Medical Image FusiontirupalNo ratings yet
- Radiography Mcqs Question: 1. Which of The Following Imaging Modalities Uses X - Rays?Document8 pagesRadiography Mcqs Question: 1. Which of The Following Imaging Modalities Uses X - Rays?Saurav MishraNo ratings yet
- Philips 32PFL5505Document2 pagesPhilips 32PFL5505amitdce0178No ratings yet
- B9 Manual of PhotographyDocument17 pagesB9 Manual of PhotographypkrajniNo ratings yet
- Tutorial PhotogrammetryDocument2 pagesTutorial PhotogrammetryAyush P GuptaNo ratings yet
- 17-Article Text-31-1-10-20200502Document4 pages17-Article Text-31-1-10-20200502yusfiani rizqiNo ratings yet
- ComputerGraphicsNotesWeek9 01 0418Document6 pagesComputerGraphicsNotesWeek9 01 0418MD KAMRUZZAMANNo ratings yet
- Lab 4 - ProcedureDocument10 pagesLab 4 - ProcedureMuhdFikriNo ratings yet
- Masks and Clipping Paths in InkscapeDocument8 pagesMasks and Clipping Paths in InkscapeluisramonluisNo ratings yet
- Wedding Edge: Terms & ConditionsDocument2 pagesWedding Edge: Terms & ConditionsSaif RifatNo ratings yet
- PXW Z90Document13 pagesPXW Z90Chris NolanNo ratings yet
- Lesson Plan 1 PhotographyDocument3 pagesLesson Plan 1 Photographyapi-238908798No ratings yet
- GitUp-GIT2-User-Full Manual PDFDocument25 pagesGitUp-GIT2-User-Full Manual PDFszol888No ratings yet
- Polytechnic University of The Philippines Sta. Mesa, Manila S/Y 2019 - 2020Document2 pagesPolytechnic University of The Philippines Sta. Mesa, Manila S/Y 2019 - 2020Abegail NazarreaNo ratings yet
- Sony KDL-40BX420 CNET Review Calibration ResultsDocument7 pagesSony KDL-40BX420 CNET Review Calibration ResultsDavid KatzmaierNo ratings yet
- CCTV Basics: Adept Designs PVT LTDDocument41 pagesCCTV Basics: Adept Designs PVT LTDsyedriyazzz100% (4)
- IIR False ColourDocument2 pagesIIR False ColourNatasa IlicNo ratings yet
- AP20Feb2016 PDFDocument84 pagesAP20Feb2016 PDFMihaiMomiNo ratings yet
- Manual Nikon Z50 UM - EU (En) 03Document80 pagesManual Nikon Z50 UM - EU (En) 03Malaisteanu MihaiNo ratings yet
- NeuViz 16 Classic CatálogoDocument8 pagesNeuViz 16 Classic CatálogoOscar CorreaNo ratings yet
- L3 - 4-Digital Video StandardsDocument60 pagesL3 - 4-Digital Video StandardsHazem MousaNo ratings yet
- Kodak WrattenFilters TextDocument50 pagesKodak WrattenFilters TextRubén GonzálezNo ratings yet
- 3.5 Smoothing (Lowpass) Spatial Filters - Lowpass Gaussian Filter KernelsDocument38 pages3.5 Smoothing (Lowpass) Spatial Filters - Lowpass Gaussian Filter KernelsPYCNo ratings yet
- L05 Topic1C Multimedia Element VideoDocument33 pagesL05 Topic1C Multimedia Element VideoRAYCHEAL VERONICA TONGNo ratings yet