STABILITY
AND CONTROL
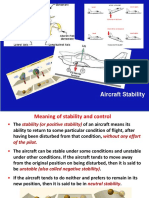
�INTRODUCTION
How well an airplane flies and how easily it can be controlled are subjects
studied in aircraft stability and control. By stability we mean the tendency of
the airplane to return to its equilibrium position after it has been disturbed.
The disturbance may be generated by the pilot's control actions or by
atmospheric phenomena. The atmospheric disturbances can be wind gusts,
wind gradients, or turbulent air. An airplane must have sufficient stability that
the pilot does not become fatigued by constantly having to control the airplane
owing to external disturbances.
� A classic airplane has three basic controls:
1. ailerons,
2. elevator, and
3. rudder.
They are designed to change and control the moments about the roll, pitch, and
yaw axes. These control surfaces are flap like surfaces that can be deflected back
and forth at the command of the pilot.
Rolling The ailerons control the roll or lateral motion and are therefore
often called the lateral control
Pitching The elevator controls pitch or the longitudinal motion and thus is
often called the longitudinal control
Yawing The rudder controls yaw or the directional motion and thus is
called the directional control
�STATIC STABILITY
Stability is a property of an equilibrium state. To discuss
stability we must first define what is meant by equilibrium. If an airplane is to
remain in steady uniform flight, the resultant force as well as the resultant
moment about the center of gravity must both be equal to zero. An airplane
satisfying this requirement is said to be in a state of equilibrium or flying at a
trim condition. On the other hand, if the forces and moments do not sum to
zero, the airplane will be subjected to translational and rotational
accelerations.
�STATIC STABILITY
Statically stable. If the forces and moments on the body caused by a disturbance tend
initially to return the body toward its equilibrium position, the body is statically stable
�Statically unstable. If the forces and moments are such that the body continues to move
away from its equilibrium position after being disturbed, the body is statically unstable
Neutrally stable If the body is disturbed but the moments remain zero, the body stays in
equilibrium and is neutrally stable
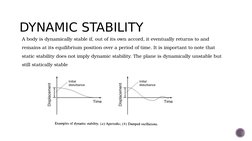
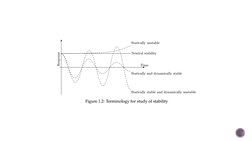
�DYNAMIC STABILITY
A body is dynamically stable if, out of its own accord, it eventually returns to and
remains at its equilibrium position over a period of time. It is important to note that
static stability does not imply dynamic stability. The plane is dynamically unstable but
still statically stable
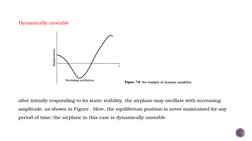
�Dynamically unstable
after initially responding to its static stability, the airplane may oscillate with increasing
amplitude, as shown in Figure . Here, the equilibrium position is never maintained for any
period of time; the airplane in this case is dynamically unstable
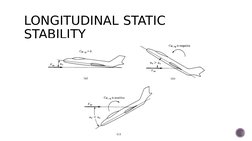
��LONGITUDINAL STATIC
STABILITY
�If the airplane is flying at its trim angle of attack and suddenly encounters a disturbance
that causes it to pitch up or down (e.g., due to a wind gust), the moment will be such that
the plane will return to its equilibrium position. To see that, imagine a wind gust pitching
the plane up from ae to some larger a. By looking at the plot in Fig. , you can see that the
moment coefficient (and hence the moment) will be negative, which makes the plane pitch
down and return to equilibrium
��If the gust pitches the nose downward a negative (counterclockwise) moment
results, which also tends to pitch the nose further away from its equilibrium
position. Therefore, because the airplane always tends to diverge from equilibrium
when disturbed, it is statically unstable
�CRITERION
To have static longitudinal stability
1. Cmo must be positive.
2. the aircraft pitching moment curve must have a negative slope, i.e.
dCm/dC <0
�CONTRIBUTION OF AIRCRAFT COMPONENTS
COMPONENTS such as
WING
TAIL etc
�WING CONTRIBUTION
Wing contribution to the pitching moment:
If we sum the moments about the center of gravity, the following equation is
obtained:
�TAIL CONTRIBUTION
There are two interference effects that influence the tail aerodynamics:
1. The airflow at the tail is deflected downward by the downwash due to the
finite wing i.e., the relative wind seen by the tail is
not in the same direction as the relative wind
V seen by the wing.
2. Due to the retarding force of skin friction and pressure drag over the wing,
the airflow reaching the tail has been slowed. Therefore, the velocity of the
relative wind seen by the tail is less than V
Flow and force diagrams in the viscinity of the tail .
the sum of moments about the center of gravity of the tail is
� On simplifying,
�TOTAL PITCHING MOMENT
.In terms of angle of attack,
�EQUATIONS FOR
LONGITUDINAL STATIC
STABILITY
By definition, CM0 is the value of CM cg When a = 0, that is,when the lift is
zero. Substituting a= 0 into above equation we directly obtain
Consider now the slope of the moment coefficient curve. Differentiating total
moment equation w
ith respect to a, we obtain
�THE NEUTRAL POINT
There is one specific location of the center of gravity such that
dCM cg/da= 0. The value of h when this condition holds is defined as the
neutral point, denoted by hn.
The location of the neutral point is readily obtained from Eq. (7.28) by
setting h = hn and dCM cg/d a = 0, as follows.
�The concept of the neutral point is introduced as an alternative stability
Criterion.
For longitudinal static stability, the position Of the center of gravity must
always be forward of the neutral point.
�THE STATIC MARGIN
ILLUSTRATION OF STATIC MARGIN
� Equation above shows that the static margin is a direct measure of longitudi
nal static stability. For static stability, the static margin must be positive.
Moreover, the larger the static margin, the more stable is the airplane.
�LONGITUDINAL CONTROL
Control of an airplane can be achieved by providing an incremental lift force
on one or more of the airplane's lifting surfaces. The incremental lift force can
be produced by deflecting the entire lifting surface or by deflecting a flap
incorporated in the lifting surface. Owing to the fact that the control flaps or
movable lifting surfaces are located at some distance from the center of
gravity, the incremental lift force creates a moment about the airplane's center
of gravity. Figure below shows the three primary aerodynamic controls.
� Primary aerodynamic controls:
�Factors affecting the design of a control surface are control effectiveness,
hinge moments, and aerodynamic and mass balancing.
�ELEVATOR EFFECTIVENESS
When the elevator is deflected, it changes the lift and pitching moment of
the airplane. The change in lift for the airplane can be expressed as follows
curve.
The influence of the elevator on the Cm vs
� the pitching moment equation yields
By simplifying, we get
Flap effectiveness parameter.
�ELEVATOR ANGLE TO TRIM
Setting the pitching moment of equation equal to zero
(definition of trim) we can solve for the elevator angle required to trim the
airplane:
By simplifying, we get the final equation for elevator angle to trim:
�DIRECTIONAL
STABILITY
�Directional stability
The directional stability and control, deal with the equilibrium and its maintainability
about the z-axis
Static directional stability is a measure of the aircraft's resistance to slipping. To have
static directional stability, the appropriate positive or negative yawing moment should be
generated to compensate for a negative or positive sideslip angle .
The greater the static directional stability the quicker the aircraft will turn into a relative
wind which is not aligned with the longitudinal axis
�Sideslip is the angle between the plane of symmetry of the airplane and the direction of
motion. It is taken as positive in the clockwise sense.
It is denoted by .
a positive is due to a positive sideslip velocity which is the component of airplane
velocity along the y-axis.
�Criterion for directional static stability
�Consider that in equilibrium flight, the airplane is flying with =0.
Now, let a disturbance cause the airplane to develop positive sideslip of . It is observed
that to bring the airplane back to equilibrium position i.e. = 0, a positive yawing moment
(N) should be produced by the airplane. Similarly, a disturbance causing a negative
should result in N i.e. for static directional stability
Cn > 0 for static directional stability
= 0 for neutral directional stability and
< 0 for directional instability.
��Contribution of wing to Cn
�Consider an airplane with wings which have sweep . When this wing is subjected to sideslip
, the components of the free stream velocity
normal to the quarter chord line on the two wing halves will be unequal i.e. V cos( -) on the
right wing and V cos (+) on the left wing. Consequently, even if the two wing halves
are at the same angle of attack, they would experience unequal effective dynamic
pressures and their drags will be different. This will
cause a yawing moment.
The yawing moments due to the right and the left wing halves (Nw)r and (Nw)l are
��It may be noted that the contribution of wing to Cn is positive. Since, Cn should be
positive for directional static stability, a positive contribution to Cn is called stabilizing
contribution
Contribution of fuselage to Cn
A fuselage at an angle of attack produces a pitching moment and also contributes to
Cm. Similarly, a fuselage in sideslip produces a yawing moment and contributes to Cn
of the airplane.
However, in an airplane, the flow past a fuselage is influenced by the flow past the wing.
Hence, instead of an isolated fuselage, the contributions of wing and fuselage to Cn are
estimated together. It is denoted by Cnwf
�kn is the wing body interference factor which depends on the following fuselage
parameters
(a) Length of fuselage (lf).
(b) Projected side area of fuselage (Sfs).
(c) Heights (h1and h2) of fuselage at lf/4 and 3lf/ 4
The quantity kRl is an empirical factor which depends on the Reynolds number of the
fuselage (Rlf= Vlf/)
�Contribution of vertical tail
A vertical tail at an angle of attack (v) would produce a side force (Yv) and a yawing
moment (Nv)
The side force Yv is perpendicular to the
velocity Vvt. However, the angle v is small
and Yv is taken perpendicular to FRL
�Influence of wing-body combination on contribution of vertical tail
The wing body combination has the following influences.
(a) The angle of attack (v) at vertical tail is different from and
(b) The dynamic pressure ( Vvt2) experienced by it (vertical tail) is different from ( V2)
�The angle of attack is modified as:
v = +
is called side wash
The dynamic pressure experienced by
tail is expressed as:
�Differentiating by gives
� Directional control is achieved by a control surface called a rudder which is located
on the vertical tail. The rudder is a hinged flap which forms the aft portion of the
vertical tail. By rotating the flap, the lift force (side force) on the fixed vertical surface
can be varied to create a yawing moment about the center of gravity
Directional control by means of the rudder
�Rudder requirements
Adverse yaw
When an airplane is banked, in order to execute a turning maneuver, the ailerons may create
a yawing moment that opposes the turn (i.e. adverse yaw). The rudder must be able to
overcome the adverse yaw so that a coordinated turn can be achieved. The critical condition
for adverse yaw occurs when the airplane is flying slow (i.e. high CL)
Cross-wind landings
To maintain alignment with the runway during a crosswind landing requires the pilot to
fly the airplane at a sideslip angle. The rudder must be powerful enough to permit the
pilot to trim the airplane for the specified crosswinds. For transport airplanes, landing
may be carried out for cross-winds up to 15.5 m/s or 51 ft/s
� Asymmetric power condition
The critical asymmetric power condition occurs for a multiengine airplane when one
engine fails at low flight speeds. The rudder must be able to overcome the yawing
moment produced by the asymmetric thrust arrangement
Spin recovery
The primary control for spin recovery in many airplanes is a powerful rudder. The
rudder must be powerful enough to oppose the spin rotation
�ROLL STABILITY CONTROL
An airplane possesses static roll stability if, when it is disturbed from a wings-level
attitude, a restoring moment is developed. The restoring rolling moment can be shown to
be a function of the sideslip angle
The requirement for stability is that
The roll moment created on an airplane when it starts to sideslip depends upon wing
dihedral , wing sweep, position of the wing on the fuselage, and the vertical tail
�Wing dihedral
The major contributor to Cl is the wing dihedral angle T. The dihedral angle is defined as the
span wise inclination of the wing with respect to the horizontal. If the wing tip is higher than
the root section, then the dihedral angle is positive; if the wing tip is lower than the root
section, then the dihedral angle is negative. A negative dihedral angle is commonly called
anhedral.
When an airplane is disturbed from a wings-level attitude, it will begin to sideslip . Once
the airplane starts to sideslip a component of the relative wind is directed toward the
side of the airplane. The leading wing experiences an increased angle of attack and
consequently an increase in lift. The trailing wing experiences the opposite effect. The
net result is a rolling moment that tries to bring the wing back to a wings-level attitude.
This restoring moment is often referred to as the "dihedral effect"
� The additional lift created on the downward-moving wing is created by the change in angle
of attack produced by the side slipping motion. If we resolve the sideward velocity
component into components along and normal to the wing span the local change in angle of
attack can be estimated as
� Wing sweep also contributes to the dihedral effect. In the case of a sweptback wing, the
windward wing has an effective decrease in sweep angle while the trailing wing experiences
an effective increase in sweep angle. For a given angle of attack, a decrease in sweepback
angle will result in a higher lift coefficient. Therefore, the windward wing (less effective
sweep) will experience more lift than the trailing wing. It can be concluded that sweepback
adds to the dihedral effect. On the other hand, sweep forward will decrease the effective
dihedral effect .
A simplified estimate of the wing sweep contribution to Clb is presented in Eq
Fuselage contribution
The sideward flow turns in the vicinity of the fuselage and creates a local change in wing
angle of attack at the inboard wing stations. For a low wing position, the fuselage
contributes a negative dihedral effect; the high wing produces a positive dihedral effect.
In order to maintain the same C,p a low-wing aircraft will require a considerably greater
wing dihedral angle than a high-wing configuration
� The horizontal tail can also contribute to the dihedral effect in a manner similar to the wing.
However, owing to the size of the horizontal tail with respect to the wing, its contribution is
usually small.
The vertical tail
The contribution to dihedral effect from the vertical tail is produced by the side force on the
tail due to sideslip. The side force on the vertical tail produces both a yawing and a rolling
moment. The rolling moment occurs because the center of pressure for the vertical tail is
located above the aircraft's center of gravity. The rolling moment produced by the vertical tail
tends to bring the aircraft back to a wings-level attitude.
An estimate of the vertical tail contribution to Clb
�ROLL CONTROL
Roll control is achieved by the differential deflection of small flaps called ailerons which are
located outboard on the wings, or by the use of spoilers.
The basic principle behind these devices is to modify the span wise lift distribution so that
a moment is created about the x axis
Spoilers when used for roll control are usually deflected on one side only.
High wing-sweep angles make spoilers and ailerons less effective.
�Figure showing both types of roll control devices.
�Dynamic Stability Modes
Longitudinal
Short Period
Phugoid
Lateral-Directional
Spiral
Dutch Roll
Roll
� Longitudinal modes
Oscillatingmotions can be described by two parameters, the period of time required for
one complete oscillation, and the time required to damp to half-amplitude, or the time to
double theamplitudefor a dynamically unstable motion.
The longitudinal motion consists of two distinct oscillations,
1. a long-period oscillation called aphugoidmode and
2. a short-period oscillation referred to as the short-period mode
� Phugoid (longer period) oscillations
The longer period mode, called the "phugoid mode" is the one in which there is a largeamplitude variation of air-speed, pitch angle, and altitude, but almost no angle-of-attack
variation. The phugoid oscillation is really a slow interchange ofkinetic energy(velocity)
andpotential energy(height) about some equilibrium energy level as the aircraft attempts
to re-establish the equilibrium level-flight condition from which it had been disturbed.
The motion is so slow that the effects ofinertiaforces and damping forces are very low.
Although the damping is very weak, the period is so long that the pilot usually corrects
for this motion without being aware that the oscillation even exists. Typically the period
is 2060 seconds. The pilot generally can control this oscillation himself.
� Short period oscillations
With no special name, the shorter period mode is called simply the "short-period mode".
The short-period mode is a usually heavily damped oscillation with a period of only a few
seconds. The motion is a rapid pitching of the aircraft about the center of gravity. The
period is so short that the speed does not have time to change, so the oscillation is
essentially an angle-of-attack variation. The time to damp the amplitude to one-half of its
value is usually on the order of 1 second. Ability to quickly self damp when the stick is
briefly displaced is one of the many criteria for general aircraft
�TIME RESPONSE OF PHUGOID AND SHORT PERIOD MODE (LONGITUDINAL
STABILITY)
� Lateral-directional modes
"Lateral-directional" modes involve rolling motions and yawing motions.
Motions in one of these axes almost always couples into the other so the modes are
generally discussed as the "Lateral-Directional modes".
There are three types of possible lateral-directional dynamic motion:
1.roll subsidence mode,
2.spiral mode, and
3.Dutch roll mode
� Roll subsidence mode
Roll subsidence mode is simply the damping of rolling motion. There is no direct
aerodynamic moment created tending to directly restore wings-level, i.e. there is no
returning "spring force/moment" proportional to roll angle. However, there is a damping
moment (proportional to rollrate) created by the slewing-about of long wings. This prevents
large roll rates from building up when roll-control inputs are made or it damps the
rollrate(not the angle) to zero when there are no roll-control inputs.
Roll mode can be improved bydihedraleffects coming from design characteristics, such as
high wings, dihedral angles or sweep angles
� Dutch roll mode
The second lateral motion is an oscillatory combined roll and yaw motion called Dutch roll,.
The Dutch roll may be described as a yaw and roll to the right, followed by a recovery towards
the equilibrium condition, then an overshooting of this condition and a yaw and roll to the
left, then back past the equilibrium attitude, and so on. The period is usually on the order of
315 seconds, but it can vary from a few seconds for light aircraft to a minute or more for
airliners. Damping is increased by large directional stability and small dihedral and decreased
by small directional stability and large dihedral. Although usually stable in a normal aircraft,
the motion may be so slightly damped that the effect is very unpleasant and undesirable.
� In swept-back wing aircraft, the Dutch roll is
solved by installing ayaw damper, in effect a
special-purpose automatic pilot that damps out
any yawing oscillation by applying rudder
corrections. Some swept-wing aircraft have an
unstable Dutch roll. If the Dutch roll is very
lightly damped or unstable, the yaw damper
becomes a safety requirement, rather than a
pilot and passenger convenience. Dual yaw
dampers are required and a failed yaw damper is
cause for limiting flight to low altitudes, and
possibly lowermachnumbers, where the Dutch
roll stability is improved.
� Directional divergence can occur when the airplane does not possess directional or
weathercock stability. If such an airplane is disturbed from its equilibrium state, it will
tend to rotate to ever-increasing angles of sideslip. Owing to the side force acting on the
airplane, it will fly a curved path at large sideslip angles. For an airplane that has lateral
static stability (i.e. dihedral effect) the motion can occur without any significant change
in bank angle . Obviously, such a motion cannot be tolerated and can readily be avoided
by proper design of the vertical tail surface to ensure directional stability
Spiral divergence is a non oscillatory divergent motion which can occur when directional
stability is large and lateral stability is small. When disturbed from equilibrium, the
airplane enters a gradual spiraling motion . The spiral becomes tighter and steeper as
time proceeds and can result in a high-speed spiral dive if corrective action is not taken.
This motion normally occurs so gradually that the pilot unconsciously corrects for it