You might also like
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Module-2 Digital Control SystemsDocument54 pagesModule-2 Digital Control Systemsmohan krishna0% (1)
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Lecture 22-23-24 Time Domain Analysis of 2nd Order SystemsDocument73 pagesLecture 22-23-24 Time Domain Analysis of 2nd Order SystemsPradeep Kumar Mehta100% (1)
- Kendali Digital 5Document13 pagesKendali Digital 5SutantoNo ratings yet
- Systems Response With Additional Poles and ZeroesDocument26 pagesSystems Response With Additional Poles and ZeroesHafiz Usman MahmoodNo ratings yet
- Garching Control PresentationDocument90 pagesGarching Control PresentationarnoldoalcidesNo ratings yet
- DigitalControlSystems Lecture 1 PDFDocument50 pagesDigitalControlSystems Lecture 1 PDFShafayet UddinNo ratings yet
- Control Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectDocument157 pagesControl Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectVijay IndukuriNo ratings yet
- Mapping Between Z Plane and S PlaneDocument15 pagesMapping Between Z Plane and S Planeamanpanghal67% (3)
- Control Lecture 8 Poles Performance and StabilityDocument20 pagesControl Lecture 8 Poles Performance and StabilitySabine Brosch100% (1)
- Transient Response Analysis: Test Signals: Impulse Step Ramp Sin And/or CosDocument38 pagesTransient Response Analysis: Test Signals: Impulse Step Ramp Sin And/or Cosomar9aNo ratings yet
- Control Systems Formula SheetDocument12 pagesControl Systems Formula SheetliamhrNo ratings yet
- DTState SpaceDocument11 pagesDTState SpaceWonbae ChoiNo ratings yet
- Control System Toolbox (Part-II) : Imtiaz - Hussain@faculty - Muet.edu - PKDocument18 pagesControl System Toolbox (Part-II) : Imtiaz - Hussain@faculty - Muet.edu - PKKiranKumarNo ratings yet
- Chapter 8: Introduction To Systems Control: 8.1 System Stability From Pole-Zero Locations (S-Domain)Document47 pagesChapter 8: Introduction To Systems Control: 8.1 System Stability From Pole-Zero Locations (S-Domain)Sreedharachary SimhaaNo ratings yet
- 1 Digital Control System Design 1.: Pole Assignment MethodDocument56 pages1 Digital Control System Design 1.: Pole Assignment MethodAmruth ThelkarNo ratings yet
- Online Control Lecture #4Document33 pagesOnline Control Lecture #4Noor GamingNo ratings yet
- Ee9118 Dynamics & Control Stability AnalysisDocument30 pagesEe9118 Dynamics & Control Stability AnalysisAna ZanaNo ratings yet
- EPM 4056 Feedback Control Analysis and Design: Trim. 48-Trimester 2 2011/2012 Ching Seong Tan Multimedia UniversityDocument58 pagesEPM 4056 Feedback Control Analysis and Design: Trim. 48-Trimester 2 2011/2012 Ching Seong Tan Multimedia UniversityTan Yong LiangNo ratings yet
- IC6701 May 18 With KeyDocument14 pagesIC6701 May 18 With KeyAnonymous yO7rcec6vuNo ratings yet
- Lec 3 CDocument21 pagesLec 3 CGanesh KumarNo ratings yet
- Time Domain Analysis of 2nd Order SystemDocument57 pagesTime Domain Analysis of 2nd Order SystemNicholas NelsonNo ratings yet
- Lecture-5 Performance of Feedback Control SystemsDocument101 pagesLecture-5 Performance of Feedback Control SystemsHeba FarhatNo ratings yet
- ControlSystem2 PDFDocument40 pagesControlSystem2 PDFBùi MTriếtNo ratings yet
- Tutorial II DesignDocument4 pagesTutorial II Designgeofrey fungoNo ratings yet
- Process ControlDocument55 pagesProcess ControlUmair IqbalNo ratings yet
- EMS507 Lecture 3 - System StabilityDocument21 pagesEMS507 Lecture 3 - System Stability124ll124No ratings yet
- Notes 03 - Nyquist PlotsDocument3 pagesNotes 03 - Nyquist PlotsJai GaizinNo ratings yet
- KTH, DN2221, Computer Lab 2Document22 pagesKTH, DN2221, Computer Lab 2sebastianNo ratings yet
- Digital Control Part 2Document18 pagesDigital Control Part 2Zhraa NorNo ratings yet
- Time Response AnalysisDocument151 pagesTime Response AnalysisTushar GuptaNo ratings yet
- 08 Models APDocument31 pages08 Models APLucio Portuguez AlmanzaNo ratings yet
- Ejercicios DSCDocument39 pagesEjercicios DSCFreyley LeyvaNo ratings yet
- A Sliding Mode Control For Robot ManipulatorDocument27 pagesA Sliding Mode Control For Robot ManipulatorauraliusNo ratings yet
- Response Spectrum Analysis PDFDocument30 pagesResponse Spectrum Analysis PDFSujay SantraNo ratings yet
- Ee481 p11 Root Locus DesignDocument77 pagesEe481 p11 Root Locus DesignDwi Ika BasithaNo ratings yet
- Chapter 3 Stability of DCSDocument34 pagesChapter 3 Stability of DCSAnonymous AFFiZnNo ratings yet
- Time & Frequency Response of The System Using MATLAB: SoftwareDocument9 pagesTime & Frequency Response of The System Using MATLAB: SoftwareVenkatesh KumarNo ratings yet
- Frequency ResponseDocument30 pagesFrequency ResponseGovind KumarNo ratings yet
- Ziegler-Nichols Controller Tuning ExampleDocument6 pagesZiegler-Nichols Controller Tuning ExampleChristine AvdikouNo ratings yet
- System Design 10 - Time Domain AnalysisDocument14 pagesSystem Design 10 - Time Domain AnalysisSanjay RaajNo ratings yet
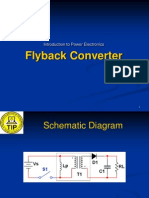
- Lesson 9 - Flyback ConverterDocument31 pagesLesson 9 - Flyback ConverterJhana Kimberly S. AquinoNo ratings yet
- EP 5511 - Lecture 07Document33 pagesEP 5511 - Lecture 07Solomon Tadesse AthlawNo ratings yet
- F44128640 Homework LCS DING JoelDocument19 pagesF44128640 Homework LCS DING JoelNotnowNo ratings yet
- Modelling Discrete Time SystemsDocument6 pagesModelling Discrete Time SystemsSandeep KumarNo ratings yet
- Root Locus Method 2Document33 pagesRoot Locus Method 2Patel DipenNo ratings yet
- EE 312 Lecture 5Document7 pagesEE 312 Lecture 5دكتور كونوهاNo ratings yet
- EE 561: Digital Control Systems Problem Set # 2: Spring 2017Document4 pagesEE 561: Digital Control Systems Problem Set # 2: Spring 2017FunnyTVNo ratings yet
- AME455 - Midterm Exam 02 - 03/11/11Document7 pagesAME455 - Midterm Exam 02 - 03/11/11Cam VintatNo ratings yet
- 16-EL-A2 - Mai 2017 - Version AnglaiseDocument7 pages16-EL-A2 - Mai 2017 - Version Anglaisemadani abdelhamidNo ratings yet
- Root LocusDocument44 pagesRoot LocusDheer MehrotraNo ratings yet
- Frequency Response S-Domain Analysis Poles and ZerosDocument31 pagesFrequency Response S-Domain Analysis Poles and ZerosAbdul RajakNo ratings yet
- Systems and Transfer FunctionDocument48 pagesSystems and Transfer FunctionhgfhgfhfNo ratings yet
- CS-Lab Assignment-6 1913123Document35 pagesCS-Lab Assignment-6 1913123karthik rajuNo ratings yet
- Sheet 4 PDFDocument53 pagesSheet 4 PDFxtito2No ratings yet
- Revision 1 - SS Error & Root Locus PDFDocument38 pagesRevision 1 - SS Error & Root Locus PDFdinessrajNo ratings yet
- CH 06Document52 pagesCH 06Ali AhmedNo ratings yet
- Kendali Digital 8Document9 pagesKendali Digital 8SutantoNo ratings yet
- Kendali Digital 6Document9 pagesKendali Digital 6SutantoNo ratings yet
- Kendali Digital 3Document9 pagesKendali Digital 3SutantoNo ratings yet
- Kendali Digital 2Document9 pagesKendali Digital 2SutantoNo ratings yet
- Kendali Digital 7Document4 pagesKendali Digital 7SutantoNo ratings yet
- PLTN Dan Pembangkit Konvensional-1Document19 pagesPLTN Dan Pembangkit Konvensional-1SutantoNo ratings yet
- Tradoc LPSG PDFDocument21 pagesTradoc LPSG PDFDavid ChildersNo ratings yet
- ERP Seminarski RadDocument15 pagesERP Seminarski RadRadomir JotićNo ratings yet
- (E-Book) Czerny - Lettere Sull'Arte Di Suonare Il PianoforteDocument16 pages(E-Book) Czerny - Lettere Sull'Arte Di Suonare Il PianoforteStefano SintoniNo ratings yet
- 5IN296UMUL B - Orbit Pro User ManualDocument36 pages5IN296UMUL B - Orbit Pro User Manualexplorer2No ratings yet
- Sec 24 - PLDT V NTCDocument11 pagesSec 24 - PLDT V NTCDanica Irish RevillaNo ratings yet
- Canon in D Arr. Lee Galloway - Piano With Notes NamesDocument5 pagesCanon in D Arr. Lee Galloway - Piano With Notes Namesvarun50% (2)
- Castle in The Sky HalcyonMusicDocument4 pagesCastle in The Sky HalcyonMusicfishfootNo ratings yet
- Man of La Mancha InitiationDocument12 pagesMan of La Mancha Initiationkoochimetal50% (2)
- Cosmic Attunement: Christian Bernard, FRCDocument6 pagesCosmic Attunement: Christian Bernard, FRCGg KNo ratings yet
- Quadrotor UAV For Wind Profile Characterization: Moyano Cano, JavierDocument85 pagesQuadrotor UAV For Wind Profile Characterization: Moyano Cano, JavierJuan SebastianNo ratings yet
- 2007PLDocument4 pages2007PLvaliataNo ratings yet
- Nat King Cole Songbook Páginas 32 33Document2 pagesNat King Cole Songbook Páginas 32 33luis artuz50% (2)
- Les Mis Musical EssayDocument2 pagesLes Mis Musical EssayGarrett CannaNo ratings yet
- Sonny's Blues AnalysisDocument13 pagesSonny's Blues AnalysisAnonymous dWP2sz47e7No ratings yet
- MRFU Description: Huawei Technologies Co., LTDDocument14 pagesMRFU Description: Huawei Technologies Co., LTDعلي عباسNo ratings yet
- Hoover React ManualDocument52 pagesHoover React ManualMarie SantoroNo ratings yet
- 741682Document31 pages741682Maria Jimena Lovon- HidalgoNo ratings yet
- Antennas in PracticeDocument113 pagesAntennas in PracticeDamith AmarakoonNo ratings yet
- PDF Makalah Usg Rontgen CTG Dan Laparoskopi CompressDocument33 pagesPDF Makalah Usg Rontgen CTG Dan Laparoskopi Compressmeranihurdita1No ratings yet
- ED SHEERAN LYRICS Castle On The HillDocument2 pagesED SHEERAN LYRICS Castle On The HillCarlosPinillaNo ratings yet
- PAFM1000W144: 1000W - Ham Radio 2M/144Mhz Power Amplifier ModuleDocument7 pagesPAFM1000W144: 1000W - Ham Radio 2M/144Mhz Power Amplifier ModuleadyglassNo ratings yet
- Culture and IdentityDocument11 pagesCulture and IdentityMohammed K AlShakhori100% (2)
- EC6402 Communication Theory Question Bank For EceDocument5 pagesEC6402 Communication Theory Question Bank For EcemohanNo ratings yet
- Mapeh 4Document5 pagesMapeh 4Hannah France Joyce SanjuanNo ratings yet
- Sound Workshop Handouts (35 Pages)Document35 pagesSound Workshop Handouts (35 Pages)Tom O'Haver100% (1)
- Bicf2016 Result - Choir Championship Part-1Document1 pageBicf2016 Result - Choir Championship Part-1Anonymous 5uE21jbdNo ratings yet
- Logistical Support of The Armies Vol 1Document636 pagesLogistical Support of The Armies Vol 1Bob Andrepont100% (3)
- 3rd Oliver and PeppercornDocument7 pages3rd Oliver and PeppercornJovilyn Flores BarayangNo ratings yet
- Carol of The Bells Pentatonix VersionDocument23 pagesCarol of The Bells Pentatonix VersionDaniel Mayet100% (1)
- Intelligent Video Surveillance System PDFDocument29 pagesIntelligent Video Surveillance System PDFWafa BenzaouiNo ratings yet