You might also like
- Applied Directly To The Stator WindingsDocument62 pagesApplied Directly To The Stator WindingsZekarias tenawNo ratings yet
- Construction of Three Phase Induction MotorDocument18 pagesConstruction of Three Phase Induction MotorRajeev ValunjkarNo ratings yet
- The Induction Motor: A Detailed Look at Its Operation and CharacteristicsDocument13 pagesThe Induction Motor: A Detailed Look at Its Operation and CharacteristicsAsimNo ratings yet
- Starting Method of 3-Phase Induction MotorDocument4 pagesStarting Method of 3-Phase Induction MotorRajith Gamage100% (2)
- Induction Motor (Asynchronous Motor) : Electrical MachinesDocument41 pagesInduction Motor (Asynchronous Motor) : Electrical MachinesNAITIKNo ratings yet
- Slip Power Recovery-Induction MotorDocument24 pagesSlip Power Recovery-Induction MotorSulthaniya BeeviNo ratings yet
- Induction Machine ReportDocument24 pagesInduction Machine ReportSiddharth NandhanNo ratings yet
- Sinusoidal PMAC Motor - 6th AprilDocument4 pagesSinusoidal PMAC Motor - 6th AprilSourav KumarNo ratings yet
- Modeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabDocument12 pagesModeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabIAEME PublicationNo ratings yet
- Electrical Engineering QUESTION BANKDocument7 pagesElectrical Engineering QUESTION BANKMATHANKUMAR.S100% (1)
- Closed Loop Speed Control of DC Motor DrivesDocument4 pagesClosed Loop Speed Control of DC Motor DrivesypobuleshNo ratings yet
- UNIT 5 - Special MachinesDocument33 pagesUNIT 5 - Special MachinesKapilachander ThangavelNo ratings yet
- GMI AC Motor GuideDocument54 pagesGMI AC Motor GuideSmai HondoNo ratings yet
- PCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveDocument5 pagesPCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveJanup PokharelNo ratings yet
- DC Motor Drives: Multi-Quadrant OperationDocument26 pagesDC Motor Drives: Multi-Quadrant OperationSudhir P BhatNo ratings yet
- Chapter 1 Det50063 - IntroductionDocument12 pagesChapter 1 Det50063 - IntroductionFara FaraNo ratings yet
- Transformer Construction: Core, Windings, Tank, Cooling MethodsDocument23 pagesTransformer Construction: Core, Windings, Tank, Cooling MethodsOscar Kelvin NsituNo ratings yet
- AC Machines FundamentalsDocument129 pagesAC Machines Fundamentalshotty pantsNo ratings yet
- Induction Motors Unit 3Document26 pagesInduction Motors Unit 3babu KaroliNo ratings yet
- DC Lecture NotesDocument30 pagesDC Lecture NotesTI IgnitorsNo ratings yet
- 3 Phase Induction Motor ReportDocument5 pages3 Phase Induction Motor ReportOPIYO ONYANGO100% (3)
- Generators and Transformers: Prepared by M.Aruna / EeeDocument11 pagesGenerators and Transformers: Prepared by M.Aruna / EeegssasiNo ratings yet
- 3phase Induction Motor (Sukhpreet)Document17 pages3phase Induction Motor (Sukhpreet)Ankesh KunwarNo ratings yet
- Practical Training PresentationDocument29 pagesPractical Training PresentationpoojaNo ratings yet
- Speed Control of Induction Motors - 2 PDFDocument22 pagesSpeed Control of Induction Motors - 2 PDFZariz ZakianNo ratings yet
- DC GeneratorDocument38 pagesDC Generatoraswardi8756No ratings yet
- Brushless D.C. Motors: Prepared By: Manuj Garg (2k13/EE/070) Mohit Goswami (2k13/EE/073)Document17 pagesBrushless D.C. Motors: Prepared By: Manuj Garg (2k13/EE/070) Mohit Goswami (2k13/EE/073)Manuj GargNo ratings yet
- Design Differences Between Salient Pole and Non-Salient Pole Synchronous MachinesDocument25 pagesDesign Differences Between Salient Pole and Non-Salient Pole Synchronous MachinesHiren KapadiaNo ratings yet
- Construction of Three Phase Induction MotorDocument6 pagesConstruction of Three Phase Induction MotorMuhammadZaydArattKhanNo ratings yet
- 3 Phase Induction Motor Speed Control Using PIC PDFDocument18 pages3 Phase Induction Motor Speed Control Using PIC PDFAmmar Al-Kindy100% (2)
- Development of Electric Drives in Light Rail Transit (LRT) SystemDocument31 pagesDevelopment of Electric Drives in Light Rail Transit (LRT) SystemArjun Pratap Singh100% (1)
- Single Phase I.M. Understanding LevelDocument3 pagesSingle Phase I.M. Understanding LevelK S Ravi Kumar (MVGR EEE)No ratings yet
- Injection of EMF in Rotor Circuit PDFDocument5 pagesInjection of EMF in Rotor Circuit PDFkhidirtay50% (2)
- CH 3 - Induction MotorsDocument46 pagesCH 3 - Induction MotorsMiz AelyfhaNo ratings yet
- Lab 3 3-Phase Induction Motor Characteristics - r2Document9 pagesLab 3 3-Phase Induction Motor Characteristics - r2aaronNo ratings yet
- Welcome: Electrical Machines Testing DepartmentDocument58 pagesWelcome: Electrical Machines Testing DepartmentMani KandanNo ratings yet
- LAB 13 To Investigate Double Bus-Bar Coupling and Switching Sequence For Disconnectors and Power Circuit BreakersDocument5 pagesLAB 13 To Investigate Double Bus-Bar Coupling and Switching Sequence For Disconnectors and Power Circuit BreakersFARYYAD RANANo ratings yet
- Induction Motor: Navigation SearchDocument8 pagesInduction Motor: Navigation SearchSoni Mishra TiwariNo ratings yet
- Speed Control of Three Phase Induction MotorDocument13 pagesSpeed Control of Three Phase Induction MotorSara Saad100% (2)
- Arc Welding PPT FinishDocument50 pagesArc Welding PPT FinishmahendraNo ratings yet
- Synchronous Generator PrinciplesDocument27 pagesSynchronous Generator Principlessrinimeha@gmail.comNo ratings yet
- Hystersis Motor PDFDocument15 pagesHystersis Motor PDFJohn BogyNo ratings yet
- NR 410202 Power Semiconductor DrivesDocument8 pagesNR 410202 Power Semiconductor DrivesSrinivasa Rao GNo ratings yet
- Induction MotorDocument20 pagesInduction MotorC V VIJAY KUMASRNo ratings yet
- Air GapDocument20 pagesAir GapSurabhi MattaNo ratings yet
- AC Machine Stator Phases and Induction Motor Rotating Magnetic FieldDocument39 pagesAC Machine Stator Phases and Induction Motor Rotating Magnetic FieldSaneer M SaliNo ratings yet
- AC Motor Name Plate - Terms & MeaningsDocument2 pagesAC Motor Name Plate - Terms & Meaningsavandetq15No ratings yet
- Induction MotorDocument24 pagesInduction MotorAMAMA KHANNo ratings yet
- Ferranti Effect and Skin EffectDocument8 pagesFerranti Effect and Skin EffectMaaz KhanNo ratings yet
- Amplifier ServoDocument3 pagesAmplifier ServoinputzNo ratings yet
- Question Bank 2Document11 pagesQuestion Bank 2IppiNo ratings yet
- DC Machines Fundamentals and ClassificationDocument67 pagesDC Machines Fundamentals and ClassificationAly Ashraf100% (1)
- Synchronous MachinesclassDocument76 pagesSynchronous Machinesclassbhuvana71No ratings yet
- (Single+Three) Phase Induction Motors Interview Questions SetDocument18 pages(Single+Three) Phase Induction Motors Interview Questions SetrajshahieeeNo ratings yet
- 3-Phase Induction Motor GuideDocument108 pages3-Phase Induction Motor GuideKshitij ShrivastavaNo ratings yet
- Poly-Phase Induction MotorDocument27 pagesPoly-Phase Induction Motorjaveria zafeerNo ratings yet
- Three Phase Induction Motor FundamentalsDocument3 pagesThree Phase Induction Motor FundamentalsDhanashree ParanjapeNo ratings yet
- Taken From Course Structure 3 Phase Induction MachinesDocument18 pagesTaken From Course Structure 3 Phase Induction MachinesSyed Ahmed MasoodNo ratings yet
- Chapter 3 Induction Motor PDFDocument26 pagesChapter 3 Induction Motor PDFNeezam Halim50% (2)
- Steyr Marine Engines: MO256H45 I MO256K43Document2 pagesSteyr Marine Engines: MO256H45 I MO256K43Ayegba AchimuguNo ratings yet
- VACUUM PUMP TESTING 1980s Mercedes DieselDocument3 pagesVACUUM PUMP TESTING 1980s Mercedes DieselrickbmayNo ratings yet
- Master Power Turbos - Application Catalog - Jun/2011Document83 pagesMaster Power Turbos - Application Catalog - Jun/2011aalacombe100% (3)
- Shop Manual: Mega Sc750 Sidecar EngineDocument26 pagesShop Manual: Mega Sc750 Sidecar EngineDaniel HughesNo ratings yet
- Honda CR V 2007 2009 Fuel and Emissions Service Repair ManualDocument20 pagesHonda CR V 2007 2009 Fuel and Emissions Service Repair Manualjulia100% (45)
- Navi Star Powerstroke Diesel Engine PartsDocument35 pagesNavi Star Powerstroke Diesel Engine PartsJonathan Carlson100% (1)
- BellisMarcom Manual BookDocument336 pagesBellisMarcom Manual BookVictor100% (1)
- DE165GCDocument2 pagesDE165GCHesham HusseinNo ratings yet
- Scheduled Maintenance Program Turbocharged F, GP, &SD Model Locomotives (645E3 Thru 645E3C Engines)Document16 pagesScheduled Maintenance Program Turbocharged F, GP, &SD Model Locomotives (645E3 Thru 645E3C Engines)amir barekatiNo ratings yet
- High Octane FuelDocument9 pagesHigh Octane FuelPurna Satria NugrahaNo ratings yet
- The Book of The Honda by John Thorpe 1966Document112 pagesThe Book of The Honda by John Thorpe 1966greaternorthroad8820100% (1)
- Engine and AccessoriesDocument4 pagesEngine and AccessoriesElbichoParedesNo ratings yet
- Engine Control System PDFDocument1,770 pagesEngine Control System PDFPoon Electronic Training CentreNo ratings yet
- D1146, P086Document314 pagesD1146, P086griffithNo ratings yet
- Water Pump Cover-5Document39 pagesWater Pump Cover-5OlegNo ratings yet
- The Diesel Cycle Explained: Processes, Diagrams and EfficiencyDocument1 pageThe Diesel Cycle Explained: Processes, Diagrams and EfficiencyGladys Ruth PaypaNo ratings yet
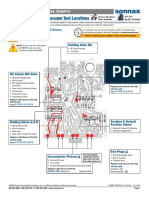
- 845RE ZF8HP45-70 VacTestGuide (1) 11Document4 pages845RE ZF8HP45-70 VacTestGuide (1) 11automaticosbrasilNo ratings yet
- American Pneumatic Tool Model 160 Paving Breaker SpecificationsDocument2 pagesAmerican Pneumatic Tool Model 160 Paving Breaker SpecificationsCARLOS LEONNo ratings yet
- Revue Technique Hyndai I10Document147 pagesRevue Technique Hyndai I10ossoski100% (5)
- Project 1Document1 pageProject 1Sharif Mohd ZakiNo ratings yet
- Cylinder Block and Flywheel Parts ListDocument2 pagesCylinder Block and Flywheel Parts ListJUPRI HARTONONo ratings yet
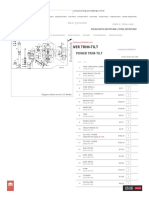
- Honda Marine BF20DK0 LHTA POWER TRIM-TILT - Babbitts Honda PartshouseDocument3 pagesHonda Marine BF20DK0 LHTA POWER TRIM-TILT - Babbitts Honda PartshouseFacundo Manuel RamatNo ratings yet
- Mitsubish Engine 6D34 PDFDocument292 pagesMitsubish Engine 6D34 PDFkyaw89% (9)
- Waveform Guide 7-30-2015 FinalDocument192 pagesWaveform Guide 7-30-2015 FinalClaudiu MihailaNo ratings yet
- Exhaust Gases MeasurementDocument8 pagesExhaust Gases MeasurementMechinistNo ratings yet
- Ravenol VMP Sae 5W-30Document3 pagesRavenol VMP Sae 5W-30Laurentiu GlavanNo ratings yet
- Mitsubishi Lancer EVO X Engine Overhaul PDFDocument74 pagesMitsubishi Lancer EVO X Engine Overhaul PDFStephen JordanNo ratings yet
- DJANGO Manual 125-150cc PDFDocument83 pagesDJANGO Manual 125-150cc PDFsimrs.rsudkojaNo ratings yet
- Operational advice for compliance with 2020 IMO sulphur capDocument20 pagesOperational advice for compliance with 2020 IMO sulphur capprashantscribd123No ratings yet
- Hydraulic Pumps: Main MenuDocument15 pagesHydraulic Pumps: Main MenuNaing Min Htun100% (3)