You might also like
- Nism Va Admit CardDocument2 pagesNism Va Admit CardManjunath Malyavantham100% (1)
- Big M MethodDocument12 pagesBig M MethodAbhishek SinghNo ratings yet
- Simplex MethodDocument16 pagesSimplex MethodShantanu Dutta100% (1)
- Test Bank for Precalculus: Functions & GraphsFrom EverandTest Bank for Precalculus: Functions & GraphsRating: 5 out of 5 stars5/5 (1)
- Introduction To Asta PowerprojectDocument37 pagesIntroduction To Asta Powerprojectawal7607No ratings yet
- Dual Simplex Method For Solving The PrimalDocument49 pagesDual Simplex Method For Solving The PrimalMyth SoumithNo ratings yet
- L09 - Some Exceptional Cases in LPPs PDFDocument30 pagesL09 - Some Exceptional Cases in LPPs PDFNirmitNo ratings yet
- 04 Simplex 2Document36 pages04 Simplex 2Potnuru VinayNo ratings yet
- 08 Simplex 3 CDocument31 pages08 Simplex 3 CPotnuru VinayNo ratings yet
- Additional Simplex Algorithms: Dual Simplex Method and Generalized Simplex MethodDocument44 pagesAdditional Simplex Algorithms: Dual Simplex Method and Generalized Simplex MethodAnimesh ChoudharyNo ratings yet
- Simplex MethodDocument61 pagesSimplex MethodvasudhasinghNo ratings yet
- m140 Chapter3 Sec3.4 F18completedDocument6 pagesm140 Chapter3 Sec3.4 F18completedHasmitthaNo ratings yet
- Addition of A New ConstraintDocument22 pagesAddition of A New ConstraintPotnuru VinayNo ratings yet
- Assinment 1 Question 2Document4 pagesAssinment 1 Question 2mohammed aliNo ratings yet
- In This Presentation We Illustrate The Ideas Developed in The Previous Presentation With Two More ProblemsDocument21 pagesIn This Presentation We Illustrate The Ideas Developed in The Previous Presentation With Two More ProblemsAngad SehdevNo ratings yet
- Simplex Method ComputationDocument7 pagesSimplex Method ComputationGoody keyzNo ratings yet
- Electrical Engineering Engineering Operations Research Linear Programming Problems NotesDocument46 pagesElectrical Engineering Engineering Operations Research Linear Programming Problems NotesAntónio FreitasNo ratings yet
- Big M MethodDocument28 pagesBig M Methodأزرين رحيم0% (1)
- The Simplex Algorithm: Putting Linear Programs Into Standard Form Introduction To Simplex AlgorithmDocument25 pagesThe Simplex Algorithm: Putting Linear Programs Into Standard Form Introduction To Simplex AlgorithmmritroyNo ratings yet
- Class Note Simplex MethodDocument6 pagesClass Note Simplex MethodBijay NagNo ratings yet
- Special Cases in Linear ProgrammingDocument21 pagesSpecial Cases in Linear ProgrammingDanna Godez100% (2)
- Simplex Method DiscussionDocument6 pagesSimplex Method DiscussionDarkknightNo ratings yet
- Operations Research - CH - IiiDocument47 pagesOperations Research - CH - Iiifentahunamanuel2No ratings yet
- Unit 2 Lecturer Notes of Linear Programming of or by DRDocument46 pagesUnit 2 Lecturer Notes of Linear Programming of or by DRSharath ChandraNo ratings yet
- Four Special Cases in SimplexDocument51 pagesFour Special Cases in SimplexQais87% (15)
- 9 Chapter 4 Simplex MethodDocument19 pages9 Chapter 4 Simplex Methodtanmoy biswasNo ratings yet
- Dual Simplex Method For Solving The PrimalDocument49 pagesDual Simplex Method For Solving The PrimalPotnuru VinayNo ratings yet
- Course Code and Title: Lesson Number: Topic:: Solve LP Problems Using Simplex Maximization MethodDocument10 pagesCourse Code and Title: Lesson Number: Topic:: Solve LP Problems Using Simplex Maximization MethodJessaNo ratings yet
- Two Phase MethodDocument45 pagesTwo Phase Methodzohaib100% (2)
- Opt lp3Document32 pagesOpt lp3no3johnnyNo ratings yet
- The Two-Phase Simplex MethodDocument22 pagesThe Two-Phase Simplex MethodKarthikeyanNo ratings yet
- The Two-Phase Simplex MethodDocument22 pagesThe Two-Phase Simplex Methodbhoopesh2688No ratings yet
- Linear Programming: Simplex Method: ProblemDocument2 pagesLinear Programming: Simplex Method: ProblemPranav SinghNo ratings yet
- MBA AssignmentDocument27 pagesMBA AssignmentTsega YeNo ratings yet
- 1 Simplex MethodDocument17 pages1 Simplex MethodPATRICIA COLINANo ratings yet
- Shife AssDocument14 pagesShife Assshiferaw meleseNo ratings yet
- CJ - ZJ Method SimplexDocument7 pagesCJ - ZJ Method SimplexChandra SekharNo ratings yet
- Duality in LPPDocument8 pagesDuality in LPPTibelchNo ratings yet
- Linear-Programming 101Document13 pagesLinear-Programming 101Rabin Bajagain.No ratings yet
- CH 03 Simplex Method and Sensitivity AnalysisDocument121 pagesCH 03 Simplex Method and Sensitivity AnalysisAura fairuzNo ratings yet
- Unit 1 Linear Programming ProblemDocument56 pagesUnit 1 Linear Programming ProblemSofoniasNo ratings yet
- 6 Sensitivity Analysis: 6.1 Changes in Right-Hand Side BDocument5 pages6 Sensitivity Analysis: 6.1 Changes in Right-Hand Side Bhatemakeedy1969No ratings yet
- Simplex Algorithm - IDocument36 pagesSimplex Algorithm - INishant RajpootNo ratings yet
- Quadratic ProgrammingDocument38 pagesQuadratic ProgrammingAngad SehdevNo ratings yet
- Simplex Method: March 2015Document19 pagesSimplex Method: March 2015Lalita LakraNo ratings yet
- Homework 1: ST NDDocument13 pagesHomework 1: ST NDÖzlem YurtseverNo ratings yet
- Special Cases-Matrix FormulationDocument68 pagesSpecial Cases-Matrix FormulationSudhanwa KulkarniNo ratings yet
- Simplex ProcedureDocument4 pagesSimplex ProcedureRajesh NakotiNo ratings yet
- Simplex Method - Linear Programming ProblemsDocument10 pagesSimplex Method - Linear Programming Problemsjub4jiveNo ratings yet
- 18 Dual Simplex & SensitivityDocument17 pages18 Dual Simplex & SensitivitySiddhanth SharmaNo ratings yet
- 18 Sensi 1Document24 pages18 Sensi 1Potnuru VinayNo ratings yet
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- 26 PertDocument25 pages26 PertPotnuru VinayNo ratings yet
- Hillier and Lieberman Problem 14.4-2 Page 746Document27 pagesHillier and Lieberman Problem 14.4-2 Page 746Potnuru VinayNo ratings yet
- Determination of Starting Basic Feasible SolutionDocument12 pagesDetermination of Starting Basic Feasible SolutionPotnuru VinayNo ratings yet
- Game Theory: Strategies Selected by The AdversariesDocument54 pagesGame Theory: Strategies Selected by The AdversariesPotnuru VinayNo ratings yet
- The Transportation Model - FormulationsDocument26 pagesThe Transportation Model - FormulationsPotnuru VinayNo ratings yet
- Iterative Computations of The Transportation AlgorithmDocument35 pagesIterative Computations of The Transportation AlgorithmPotnuru VinayNo ratings yet
- Some Problems Illustrating The Principles of DualityDocument22 pagesSome Problems Illustrating The Principles of DualityPotnuru VinayNo ratings yet
- Addition of A New ConstraintDocument22 pagesAddition of A New ConstraintPotnuru VinayNo ratings yet
- Dual Simplex Method For Solving The PrimalDocument49 pagesDual Simplex Method For Solving The PrimalPotnuru VinayNo ratings yet
- Matrix Formulation of The LppsDocument13 pagesMatrix Formulation of The LppsPotnuru VinayNo ratings yet
- 18 Sensi 1Document24 pages18 Sensi 1Potnuru VinayNo ratings yet
- X X X X: Minimize Subject To The ConstraintsDocument15 pagesX X X X: Minimize Subject To The ConstraintsPotnuru VinayNo ratings yet
- Duality Theorems Finding The Dual Optimal Solution From The Primal Optimal TableauDocument25 pagesDuality Theorems Finding The Dual Optimal Solution From The Primal Optimal TableauPotnuru VinayNo ratings yet
- In This Presentation We Illustrate The Ideas Developed in The Previous Presentation With Two More ProblemsDocument21 pagesIn This Presentation We Illustrate The Ideas Developed in The Previous Presentation With Two More ProblemsPotnuru VinayNo ratings yet
- Explanation of The Entries in Any Simplex Tableau in Terms of The Entries of The Starting TableauDocument33 pagesExplanation of The Entries in Any Simplex Tableau in Terms of The Entries of The Starting TableauPotnuru VinayNo ratings yet
- 01 Formulation of LPPsDocument36 pages01 Formulation of LPPsMeghashyam SandeepNo ratings yet
- Minimize Subject To The Constraints: X X X XDocument16 pagesMinimize Subject To The Constraints: X X X XPotnuru VinayNo ratings yet
- Artificial Variable Techniques - Big M-MethodDocument26 pagesArtificial Variable Techniques - Big M-MethodPotnuru VinayNo ratings yet
- Problem Set 2Document2 pagesProblem Set 2Potnuru VinayNo ratings yet
- 2-D Static Truss: Author: E-Mail: Rb88@cornell - EduDocument2 pages2-D Static Truss: Author: E-Mail: Rb88@cornell - EduPotnuru VinayNo ratings yet
- 2-D Static Truss: Step 9: Validate The ResultsDocument2 pages2-D Static Truss: Step 9: Validate The ResultsPotnuru VinayNo ratings yet
- Final Project Report: F.O.B.O Floppy Box Robot An Experiment A.I and Machine LearningDocument44 pagesFinal Project Report: F.O.B.O Floppy Box Robot An Experiment A.I and Machine LearningPotnuru VinayNo ratings yet
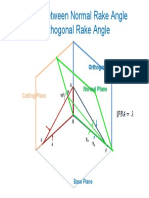
- Normal Rake AngleDocument1 pageNormal Rake AnglePotnuru VinayNo ratings yet
- Pages From ISO IEC 17021 2006Document1 pagePages From ISO IEC 17021 2006vhin84No ratings yet
- 7 PillarsDocument8 pages7 PillarsPraveena SaiNo ratings yet
- Zulú - Canon - LópezDocument1,095 pagesZulú - Canon - LópezEs TherNo ratings yet
- CE 373E UpdatedDocument4 pagesCE 373E UpdatedNeil OheneNo ratings yet
- USB For HID Devices Pos1 - 02-Weighting at Sect.4pag22Document68 pagesUSB For HID Devices Pos1 - 02-Weighting at Sect.4pag22sorin1970No ratings yet
- AVSEdit TutorialDocument16 pagesAVSEdit TutorialjosesotofigueraNo ratings yet
- Study of Transport LayerDocument14 pagesStudy of Transport LayerFebin KfNo ratings yet
- 6.5.1.2 Lab - Building A Switch and Router NetworkDocument6 pages6.5.1.2 Lab - Building A Switch and Router NetworkMirela ȘorecăuNo ratings yet
- Ic Dial PlanDocument44 pagesIc Dial PlanSpurrya JaggiNo ratings yet
- Information Technology, The Internet, and YouDocument24 pagesInformation Technology, The Internet, and YoujeluchezNo ratings yet
- KTU Syllabus S7-EEEwatermarkDocument23 pagesKTU Syllabus S7-EEEwatermarkkmuralikrish007No ratings yet
- Even Sem. - Odd Sem. - PG Exam Result 2019 - Mahatma Jyotiba Phule Rohilkhand University PDFDocument2 pagesEven Sem. - Odd Sem. - PG Exam Result 2019 - Mahatma Jyotiba Phule Rohilkhand University PDFAnshu GangwarNo ratings yet
- GST Number of Bajaj Electricals LTD Is 29AAACB2484Q1Z4 in Karnataka State Know Your GSTDocument1 pageGST Number of Bajaj Electricals LTD Is 29AAACB2484Q1Z4 in Karnataka State Know Your GSTAkash BogaNo ratings yet
- Alternative Menu For Devices Running Under WindowsCEDocument6 pagesAlternative Menu For Devices Running Under WindowsCEEGPLANNo ratings yet
- Laboratory Manual 3 PHP Database Programming: Visual Studio Code ManualDocument8 pagesLaboratory Manual 3 PHP Database Programming: Visual Studio Code ManualAbebaw AmareNo ratings yet
- Lab 1.1 IPv4 AddressingDocument20 pagesLab 1.1 IPv4 AddressingKhaiTeoNo ratings yet
- Howtoinstall Oracle 11 G R2 Clienton Windows OSDocument10 pagesHowtoinstall Oracle 11 G R2 Clienton Windows OScyclerajaNo ratings yet
- ErorDocument4 pagesErornur_rizqi_1No ratings yet
- Top 10 Pci Dss Compliance PitfallsDocument4 pagesTop 10 Pci Dss Compliance PitfallsdurgasainathNo ratings yet
- NetAcad Maintenance-Image and Hardware Support 20120827Document35 pagesNetAcad Maintenance-Image and Hardware Support 20120827Alison RibeiroNo ratings yet
- Oracle Database 10 Automatic Storage Management Technical Best PracticesDocument40 pagesOracle Database 10 Automatic Storage Management Technical Best PracticesKp SoroNo ratings yet
- IP Lab Manual 8661 ReadyDocument105 pagesIP Lab Manual 8661 ReadyRADHANo ratings yet
- KEYWORD AtuhDocument26 pagesKEYWORD AtuhMuhamad IlyasNo ratings yet
- Job CostingDocument2 pagesJob CostingAlexa FloraNo ratings yet
- 9.7 Data Converters-An Introduction: Operational-Amplifier and Data-Converter CircuitsDocument13 pages9.7 Data Converters-An Introduction: Operational-Amplifier and Data-Converter CircuitskawsikNo ratings yet
- RAC InstallDocument3 pagesRAC InstalliuliconosNo ratings yet
- MTNL Mumbai Android Directory Information: Key Features of ApplicationDocument6 pagesMTNL Mumbai Android Directory Information: Key Features of ApplicationShahzad MehtaNo ratings yet
- Self-Organizing Networks - FAJ 801 0435 R3 - PresentationDocument30 pagesSelf-Organizing Networks - FAJ 801 0435 R3 - PresentationvaleNo ratings yet