You might also like
- Appalachian Trail Map (2005)Document1 pageAppalachian Trail Map (2005)CAP History Library100% (3)
- Strength and Conditioning For Basketball PDFDocument42 pagesStrength and Conditioning For Basketball PDFCharles Stephenson100% (1)
- Tom Tellez Sprinting-A Biomechanical ApproachDocument8 pagesTom Tellez Sprinting-A Biomechanical Approachn_dhaenen100% (1)
- Biomechanics of Sprinting - FletcherDocument49 pagesBiomechanics of Sprinting - FletcherLucian Nicolau100% (2)
- Dynamic Stretching: The Revolutionary New Warm-up Method to Improve Power, Performance and Range of MotionFrom EverandDynamic Stretching: The Revolutionary New Warm-up Method to Improve Power, Performance and Range of MotionRating: 5 out of 5 stars5/5 (1)
- 2016 0304 Rehab Gait AnalysisDocument7 pages2016 0304 Rehab Gait AnalysisThao TonNo ratings yet
- Introduction To KinesiologyDocument35 pagesIntroduction To KinesiologyAjay Pal NattNo ratings yet
- ALTIS Rudiment Hop Series PDFDocument14 pagesALTIS Rudiment Hop Series PDFMefit Marvin100% (1)
- Biomechanical FactorsDocument70 pagesBiomechanical FactorsKhela ConcepcionNo ratings yet
- 7.gait Biomechanics & AnalysisDocument106 pages7.gait Biomechanics & AnalysisSaba IqbalNo ratings yet
- Chapter 48, Factors Influencing GaitDocument26 pagesChapter 48, Factors Influencing GaitShruti100% (14)
- Gait Analysis and Clinical ApplicationDocument123 pagesGait Analysis and Clinical ApplicationKanhu Mallik100% (4)
- High Jump AbstractsDocument4 pagesHigh Jump AbstractsKhushairi YahayaNo ratings yet
- Gait Training For Hemipelgic PatientsDocument12 pagesGait Training For Hemipelgic Patientssenthilkumar100% (3)
- Biomechanical Approach To SprintingDocument9 pagesBiomechanical Approach To SprintingGiovanniNo ratings yet
- Biomechanics of RunningDocument23 pagesBiomechanics of Runningpankaj daganiNo ratings yet
- Lieberman - Biomechanics of RunningDocument73 pagesLieberman - Biomechanics of RunningAnnizah Paramitha100% (2)
- Normal Pathological GaitDocument45 pagesNormal Pathological GaitshivnairNo ratings yet
- Associate Professor. Dr. Heba Mahmoud AfifyDocument53 pagesAssociate Professor. Dr. Heba Mahmoud AfifyAhmed A. EliwaNo ratings yet
- Motion - Margiasih & NihlatulDocument42 pagesMotion - Margiasih & NihlatulNihlatul_Falasifah100% (1)
- Lecture 8Document55 pagesLecture 8HamzahNo ratings yet
- 3185 FullDocument11 pages3185 FullJesus VelazquezNo ratings yet
- Lecture 9Document32 pagesLecture 9HamzahNo ratings yet
- Using Deceleration To Mitigate Injury Risk in COD: December 2018Document17 pagesUsing Deceleration To Mitigate Injury Risk in COD: December 2018Juan PalomoNo ratings yet
- 2011 D Cappa - TRAINING SPECIFICITY OF HURDLE VS. COUNTERMOVEMENT JUMP TRAINING PDFDocument6 pages2011 D Cappa - TRAINING SPECIFICITY OF HURDLE VS. COUNTERMOVEMENT JUMP TRAINING PDFLuis VargasNo ratings yet
- Long Jump Skill AnalysisDocument3 pagesLong Jump Skill AnalysisWan Yi-JieNo ratings yet
- Gait PhasesDocument29 pagesGait PhasesCherry RipeNo ratings yet
- Biomechanics of GaitDocument48 pagesBiomechanics of GaitSania SaeedNo ratings yet
- Salzburg July 2003Document2 pagesSalzburg July 2003Amr EmaraNo ratings yet
- ChartogneEnglishPaper PDFDocument3 pagesChartogneEnglishPaper PDFJony AlexanderNo ratings yet
- ChartogneEnglishPaper PDFDocument3 pagesChartogneEnglishPaper PDFJony AlexanderNo ratings yet
- Biomechanics Lab Report ExampleDocument18 pagesBiomechanics Lab Report ExampleFNo ratings yet
- Understanding Normal & PathologicalDocument45 pagesUnderstanding Normal & Pathologicalmushtaq_23No ratings yet
- Paper Derap HMMDocument9 pagesPaper Derap HMMFelix PaskalisNo ratings yet
- Brief Biomechanical Analysis On The Walking For A Lower-Limb Rehabilitation ExoskeletonDocument6 pagesBrief Biomechanical Analysis On The Walking For A Lower-Limb Rehabilitation ExoskeletonJuan PerezNo ratings yet
- Muscle Recruitment Pattern in Cycling - A ReviewDocument8 pagesMuscle Recruitment Pattern in Cycling - A Reviewlinoco1No ratings yet
- Occ 524 - Lab 1 - Movement DescriptionsDocument7 pagesOcc 524 - Lab 1 - Movement DescriptionsbirjuNo ratings yet
- Anthr SprintersDocument9 pagesAnthr SprintersMarcelo NogueraNo ratings yet
- Cronin 2006Document10 pagesCronin 2006asepsumpenaNo ratings yet
- TMP EBFDDocument9 pagesTMP EBFDFrontiersNo ratings yet
- A Movement Criterion For RunningDocument7 pagesA Movement Criterion For Runninghmalikn7581No ratings yet
- Mann 1980Document6 pagesMann 1980wandaNo ratings yet
- Body Position Determines Propulsive Forces in Accelerated RunningDocument6 pagesBody Position Determines Propulsive Forces in Accelerated RunningSajjan VirendranNo ratings yet
- Como Manter A Velocidade Máxima de Corrida em Caminho Reto em Um Caminho Curvo em Eventos de SprintDocument10 pagesComo Manter A Velocidade Máxima de Corrida em Caminho Reto em Um Caminho Curvo em Eventos de SprintFelipe José SantinNo ratings yet
- Altered Post-Stroke Propulsion Is Related To Paretic Swing Phase KinematicsDocument7 pagesAltered Post-Stroke Propulsion Is Related To Paretic Swing Phase Kinematicscelia Diz CastilloNo ratings yet
- Mati Pääsuke Põlveliigese BiomehaanikaDocument244 pagesMati Pääsuke Põlveliigese BiomehaanikathedefectedgeneNo ratings yet
- Lower Extremity Stiffness: Advanced Strength & ConditioningDocument39 pagesLower Extremity Stiffness: Advanced Strength & ConditioningGeorge M. PamborisNo ratings yet
- Feros JASC Podium 2011Document35 pagesFeros JASC Podium 2011Deependra YadavNo ratings yet
- Optimum Take-Off Techniques and Muscle Design For Long Jump: A. Seyfarth, R. Blickhan J. L. Van LeeuwenDocument10 pagesOptimum Take-Off Techniques and Muscle Design For Long Jump: A. Seyfarth, R. Blickhan J. L. Van Leeuwenjp siaNo ratings yet
- Movement Biomechanics of Human GaitDocument78 pagesMovement Biomechanics of Human GaitjeremyjlNo ratings yet
- Tuesday, 18 July 2006 TUG2-2: 11:30 - 11:45: KEY WORDS: Athlete, Force, Jerk, Kinematics, StrengthDocument4 pagesTuesday, 18 July 2006 TUG2-2: 11:30 - 11:45: KEY WORDS: Athlete, Force, Jerk, Kinematics, StrengthHams EletabNo ratings yet
- Kinematics and Kinetics of Gait: From Lab To Clinic: Clinics in Sports Medicine July 2010Document20 pagesKinematics and Kinetics of Gait: From Lab To Clinic: Clinics in Sports Medicine July 2010Sanhita SenguptaNo ratings yet
- Krutost PDFDocument10 pagesKrutost PDFNikola MijailovićNo ratings yet
- Andrews 1977 The Cutting MechanismDocument11 pagesAndrews 1977 The Cutting Mechanismfrancosala0000No ratings yet
- Batting Elbowacsm20212Document1 pageBatting Elbowacsm20212AidanFarrellNo ratings yet
- INTRODUCTION: According To A Study by Harmer (2008), Injury Positions of 78,223 FencersDocument4 pagesINTRODUCTION: According To A Study by Harmer (2008), Injury Positions of 78,223 FencerspppijkNo ratings yet
- J Jelekin 2014 06 002 PDFDocument38 pagesJ Jelekin 2014 06 002 PDFRommel AndresNo ratings yet
- Biomechanics of Competitive Swimming Strokes PDFDocument23 pagesBiomechanics of Competitive Swimming Strokes PDFgaderi123No ratings yet
- Paper SaltoDocument11 pagesPaper SaltoLeonardo Helbert Camargo P.No ratings yet
- Mitsuya Et Al., 2023Document11 pagesMitsuya Et Al., 2023Rodrigo AlvesNo ratings yet
- New Ankles Feet and Toes PDFDocument103 pagesNew Ankles Feet and Toes PDFCorey SandersNo ratings yet
- Gait PPTMDocument50 pagesGait PPTMsanavoraNo ratings yet
- Lesson Plan 4 TransitionsDocument3 pagesLesson Plan 4 Transitionsapi-340358868No ratings yet
- Rubric - Locomotor SkillsDocument6 pagesRubric - Locomotor SkillsAaron Jay Fernandez SantillanNo ratings yet
- Latest Findings in Intellectual and Developmental Disabilities ResearchDocument404 pagesLatest Findings in Intellectual and Developmental Disabilities ResearchTeo100% (1)
- Osteopathic Treatment in Equestrian SportDocument6 pagesOsteopathic Treatment in Equestrian SportSam LoretNo ratings yet
- Map and Guide To Glenafelly Eco WalkDocument1 pageMap and Guide To Glenafelly Eco WalkJohn HayesNo ratings yet
- TEF Medium Test 1Document2 pagesTEF Medium Test 1Chalermcharn YotviriyapanitNo ratings yet
- Universidade UP Ingles UP-Ingles-2016Document9 pagesUniversidade UP Ingles UP-Ingles-2016Petrus DiqueNo ratings yet
- Is The Locomotion of Crawling Human Infants Different From Other Quadruped Mammals?Document26 pagesIs The Locomotion of Crawling Human Infants Different From Other Quadruped Mammals?markus_danusantosoNo ratings yet
- Ways of WalkingDocument8 pagesWays of WalkingTatjana GjorgievskaNo ratings yet
- ALL Equestrian Australia Dressage Test For TEF 2015Document10 pagesALL Equestrian Australia Dressage Test For TEF 2015Chalermcharn YotviriyapanitNo ratings yet
- D'Iberville SidewalkPedStudy ClientReview2Document66 pagesD'Iberville SidewalkPedStudy ClientReview2leslie3mitchell3robeNo ratings yet
- Skeletal System - Appendicular SkeletonDocument24 pagesSkeletal System - Appendicular SkeletonJessa BelleNo ratings yet
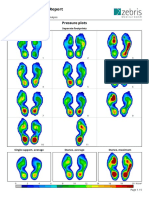
- Zebris Treadmill Gait Report: Pressure PlotsDocument5 pagesZebris Treadmill Gait Report: Pressure PlotsAwatef FituriNo ratings yet
- Dressage Levels and Comparing Elements Other CountriesDocument1 pageDressage Levels and Comparing Elements Other Countriesapi-599383803No ratings yet
- Baseline Gross MotorDocument4 pagesBaseline Gross MotorPeter BarnettNo ratings yet
- Cathelyn TimpleDocument26 pagesCathelyn TimpleCarlos Arturo Franco del MoralNo ratings yet
- Elementary 1 TestDocument1 pageElementary 1 TestLeighton EvansNo ratings yet
- Simulating The "First Steps" of A Walking Hexapod Robot: Ing. R. Woering CST 2010.075Document81 pagesSimulating The "First Steps" of A Walking Hexapod Robot: Ing. R. Woering CST 2010.075Alina MirelaNo ratings yet
- Vivid Verbs ListDocument3 pagesVivid Verbs Listyosvim4756No ratings yet
- CD2B-Prelim German Test 2Document2 pagesCD2B-Prelim German Test 2Sidqi Mujaddidi AzNo ratings yet
- Stem Map and Navigation ActivitiesDocument4 pagesStem Map and Navigation ActivitiesMaybelle AggabaoNo ratings yet
- Normal Gait: Anissa Eka SeptianiDocument23 pagesNormal Gait: Anissa Eka SeptianiNafisah BochilNo ratings yet
- Quadruped Walking Running SimulationDocument49 pagesQuadruped Walking Running SimulationbilynbkNo ratings yet
- Snake RobotDocument54 pagesSnake RobotInzamam MuhammedNo ratings yet
- 2014 Play Day Class DescriptionsDocument2 pages2014 Play Day Class Descriptionsapi-240685782No ratings yet
- Missing Person H HendricksonDocument1 pageMissing Person H HendricksonJoe MirabellaNo ratings yet