You might also like
- Test Bank For Business English 13th Edition Mary Ellen Guffey Carolyn M SeeferDocument24 pagesTest Bank For Business English 13th Edition Mary Ellen Guffey Carolyn M SeeferBrianFloydckyt100% (53)
- Set 2 AnswersDocument5 pagesSet 2 AnswersMax EisenhardtNo ratings yet
- Problems For Chapter 8Document7 pagesProblems For Chapter 8LeJohn HsuNo ratings yet
- Astro 429 Assignment 2 AlbertaDocument2 pagesAstro 429 Assignment 2 AlbertatarakNo ratings yet
- Assignment - 1Document21 pagesAssignment - 1shoyeb ahmedNo ratings yet
- ECE 5233 - Lecture 2 (Orbital Mechanics)Document11 pagesECE 5233 - Lecture 2 (Orbital Mechanics)MugelanNo ratings yet
- ECE 5233 - Lecture 2 (Orbital Mechanics)Document11 pagesECE 5233 - Lecture 2 (Orbital Mechanics)John JohnstonNo ratings yet
- PY4A03 Lecture1n2 Properties PDFDocument30 pagesPY4A03 Lecture1n2 Properties PDFRowina PantiloNo ratings yet
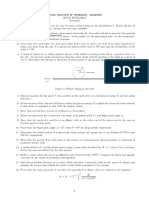
- Spacedynamics Tut 1Document6 pagesSpacedynamics Tut 1aero spaceNo ratings yet
- 2.orbital Aspects of Satellite CommunicationsDocument36 pages2.orbital Aspects of Satellite Communicationsrama krishnaNo ratings yet
- Math-Assignment-Part-3 - 1 - (7585779 - 1 - 1942-1-1634011863s00287752)Document2 pagesMath-Assignment-Part-3 - 1 - (7585779 - 1 - 1942-1-1634011863s00287752)Yann FeutseuNo ratings yet
- Kepler - Planetary and Satellite MotionDocument2 pagesKepler - Planetary and Satellite MotionMuhammad YousufNo ratings yet
- Orbit NotesDocument23 pagesOrbit Notesrouter001No ratings yet
- Atomic Physics Sommerfel BohrInitiaklQuantumMechanicsDocument44 pagesAtomic Physics Sommerfel BohrInitiaklQuantumMechanicsSyed Raza Ali RazaNo ratings yet
- Orbital AspectsDocument3 pagesOrbital AspectsMihir GhadiaNo ratings yet
- Natural and Laboratory Plasmas II - Example Sheet 1: (Z) B (1+ (Z/L) ) - HowDocument2 pagesNatural and Laboratory Plasmas II - Example Sheet 1: (Z) B (1+ (Z/L) ) - Howalteru4No ratings yet
- принстон 5 PDFDocument27 pagesпринстон 5 PDFLumpalump 300ftNo ratings yet
- The Bohr Theory of H AtomDocument9 pagesThe Bohr Theory of H AtomAyesha ImranNo ratings yet
- 23a OrbitalDocument7 pages23a Orbitalsosasej838No ratings yet
- HW 1 KkllohDocument41 pagesHW 1 KkllohKelvin Loh Kwong LamNo ratings yet
- Walker-Delta Satellite Constellation For EarthObservationDocument39 pagesWalker-Delta Satellite Constellation For EarthObservationvalstavNo ratings yet
- Exercises 2Document7 pagesExercises 2andre130912No ratings yet
- APhO 00 22Document631 pagesAPhO 00 22장근영No ratings yet
- 2.orbital Aspects of Satellite CommunicationsDocument65 pages2.orbital Aspects of Satellite Communicationsمحمود عبدالرحمن ابراهيمNo ratings yet
- Physics 02 00030 v2Document10 pagesPhysics 02 00030 v2bradyNo ratings yet
- Important Atomic Models: GeniusDocument37 pagesImportant Atomic Models: GeniusMoses AhmedNo ratings yet
- e-PG Pathshala: Ncipal InvestigatorDocument11 pagese-PG Pathshala: Ncipal InvestigatorTejinder SinghNo ratings yet
- Relativity TuteDocument6 pagesRelativity TuteThisali RathnayakaNo ratings yet
- Lecture L16 - Central Force Motion: Orbits: Energy IntegralDocument8 pagesLecture L16 - Central Force Motion: Orbits: Energy IntegralKRITANTNo ratings yet
- Atoms and NucleiDocument18 pagesAtoms and NucleianantaraajgillNo ratings yet
- Atomic PhysicsDocument56 pagesAtomic PhysicsMubashshir AminNo ratings yet
- Atmospheric Superrotation?: E.M. GaposchkinDocument11 pagesAtmospheric Superrotation?: E.M. GaposchkinFrancisco Ortiz CostaNo ratings yet
- Solvable Examples of Drift and Diffusion of Ions in Non-Uniform Electric FieldsDocument18 pagesSolvable Examples of Drift and Diffusion of Ions in Non-Uniform Electric FieldsMilan StepanovNo ratings yet
- Chapter 8 - GravitationDocument14 pagesChapter 8 - Gravitationspt007No ratings yet
- Pratt & Bostian - PPDocument3 pagesPratt & Bostian - PPapi-26783388No ratings yet
- Cavity Basics: E. JensenDocument17 pagesCavity Basics: E. JensenRaktim GuhaNo ratings yet
- Problems 42Document12 pagesProblems 42mail2sgarg_841221144No ratings yet
- Atom Models: Example 7.10 SolutionDocument12 pagesAtom Models: Example 7.10 SolutionDebanuj BasakNo ratings yet
- 63 Sample ChapterDocument16 pages63 Sample ChapterHarendra KumarNo ratings yet
- Problem Set 4Document5 pagesProblem Set 4James ConnaughtonNo ratings yet
- PHYS122 University of WaterlooDocument174 pagesPHYS122 University of WaterlooEddy LiuNo ratings yet
- Mechanics-Probs4 2017Document5 pagesMechanics-Probs4 2017Diego ForeroNo ratings yet
- Atomic StructureDocument37 pagesAtomic StructurerahulNo ratings yet
- Notes On Lesson EC2045-SatelliteCommunicationDocument157 pagesNotes On Lesson EC2045-SatelliteCommunicationindumathyprabuNo ratings yet
- Linköping University Post PrintDocument9 pagesLinköping University Post PrintwhoNo ratings yet
- Estado SolidoDocument3 pagesEstado SolidoDiego GarciaNo ratings yet
- NOTE: Bohr's ModelDocument43 pagesNOTE: Bohr's ModelmsccenterNo ratings yet
- Assignment 2Document5 pagesAssignment 2Sam BNo ratings yet
- Worksheet - 02 (Atomic Structure and Basic Concepts of Chemistty) (VSK Sir)Document4 pagesWorksheet - 02 (Atomic Structure and Basic Concepts of Chemistty) (VSK Sir)Daksha SubrhamanyaNo ratings yet
- EderDocument28 pagesEderVictor PavlovNo ratings yet
- Section 2. Satellite Orbits: 2.1 Orbital MechanicsDocument22 pagesSection 2. Satellite Orbits: 2.1 Orbital MechanicsMagno JuniorNo ratings yet
- Atomic Structure AMDocument10 pagesAtomic Structure AMShardaNo ratings yet
- Pusat Tuition Makrifat Chapter 3.3 F.4.PhyDocument5 pagesPusat Tuition Makrifat Chapter 3.3 F.4.PhyBazil BoliaNo ratings yet
- Satellite Communications: Reference Book: Satellite Communications, 3 Ed. Dennis Roddy Mcgraw-Hill International EdDocument202 pagesSatellite Communications: Reference Book: Satellite Communications, 3 Ed. Dennis Roddy Mcgraw-Hill International EdSirayy Laft Mrz0% (1)
- E S 07 Eng PDFDocument2 pagesE S 07 Eng PDFMekanNo ratings yet
- Sat - L3 - 4 Final 2022Document29 pagesSat - L3 - 4 Final 2022Donia Mohammed AbdeenNo ratings yet
- HyperfineDocument15 pagesHyperfinesediha5178No ratings yet
- Atomic StructureDocument34 pagesAtomic StructureShubh GuptaNo ratings yet
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- M.tech NetworkingDocument38 pagesM.tech Networkingmayank321No ratings yet
- Ec8105-Satellite Communication SystemsDocument11 pagesEc8105-Satellite Communication Systemsmayank321No ratings yet
- Ma6453 - PQTDocument163 pagesMa6453 - PQTmayank321No ratings yet
- Principles of ManagementDocument64 pagesPrinciples of Managementmayank321No ratings yet
- Presentation The Solar SystemDocument6 pagesPresentation The Solar SystemOrang KerenNo ratings yet
- Acquisition and Analysis of Terrestrial Gravity DataDocument182 pagesAcquisition and Analysis of Terrestrial Gravity DataVioleta Reyes OrozcoNo ratings yet
- Chandrayann: Dr.M.Sivanandam Professor and Head, Department of Electronics and Communication EngineeringDocument43 pagesChandrayann: Dr.M.Sivanandam Professor and Head, Department of Electronics and Communication EngineeringBalaji VenkataramanNo ratings yet
- Gravitation HindiDocument55 pagesGravitation HindisharkrameshNo ratings yet
- Physics 71 3rd Long Exam NotesDocument5 pagesPhysics 71 3rd Long Exam NotesArthur Conrad DiosanaNo ratings yet
- Paramahamsa Tewari - On Planetary Motion Caused by Solar Space VortexDocument9 pagesParamahamsa Tewari - On Planetary Motion Caused by Solar Space VortexKluff5878No ratings yet
- (College English 1958-Jan Vol. 19 Iss. 4) Zoellner, Robert H. - Poetic Cosmology in Pope's An Essay On Man (1958) (10.2307 - 371671) - Libgen - LiDocument7 pages(College English 1958-Jan Vol. 19 Iss. 4) Zoellner, Robert H. - Poetic Cosmology in Pope's An Essay On Man (1958) (10.2307 - 371671) - Libgen - LiGovinda KumarNo ratings yet
- Quick Reference CardDocument1 pageQuick Reference Cardapi-165866622No ratings yet
- Chapter 13Document9 pagesChapter 13drewNo ratings yet
- Solar SailsDocument24 pagesSolar SailsyogiNo ratings yet
- Keplers LawsDocument23 pagesKeplers LawsJhulia IlogonNo ratings yet
- FTRE Sample Paper Class 9th Paper 2Document26 pagesFTRE Sample Paper Class 9th Paper 2Akash100% (1)
- 2011 Physics Unit 3 Trial Exam: Chemology Education ServicesDocument36 pages2011 Physics Unit 3 Trial Exam: Chemology Education ServicesThanh TrươngNo ratings yet
- Extraordinary Technology 2014Document16 pagesExtraordinary Technology 2014Rolling76No ratings yet
- GE 217 STS Course PackDocument86 pagesGE 217 STS Course PackDianne Sophia PACA�ANo ratings yet
- Esci v202 ExamDocument28 pagesEsci v202 ExamHenry LanguisanNo ratings yet
- How Far Is The Sun WorksheetDocument6 pagesHow Far Is The Sun WorksheetJoshua Martin GuerreroNo ratings yet
- 11 Physics Chapter 8 Assignment 1Document1 page11 Physics Chapter 8 Assignment 1nellai kumarNo ratings yet
- Ancient Science and IndiaDocument9 pagesAncient Science and Indiaभारतीय संस्कृति100% (1)
- Oxford Collocations Dictionary For Students of English, 2nd EditionDocument4 pagesOxford Collocations Dictionary For Students of English, 2nd EditionAi LaiNo ratings yet
- Physics I Problems PDFDocument1 pagePhysics I Problems PDFBOSS BOSSNo ratings yet
- Ec1015 Satellitecommunicationmj09Document3 pagesEc1015 Satellitecommunicationmj09goms14No ratings yet
- Wa0011.Document2 pagesWa0011.Anil KumarNo ratings yet
- IntroductiontoClassicalMechanics CONTENTSDocument16 pagesIntroductiontoClassicalMechanics CONTENTSAlejandro PuceiroNo ratings yet
- The Speed of GravityDocument8 pagesThe Speed of GravitymasharecoNo ratings yet
- Maths of Nature and Nature of Maths Chapter 1Document16 pagesMaths of Nature and Nature of Maths Chapter 1vedam193167% (3)
- Trial P1 STPM 2022Document13 pagesTrial P1 STPM 2022Suraya MahmudNo ratings yet
- Question Bank 1 & 2Document2 pagesQuestion Bank 1 & 2jubairNo ratings yet
- Physic Form 4/5 DefinitionDocument6 pagesPhysic Form 4/5 DefinitionKa Mun LeongNo ratings yet