You might also like
- (Steve Sonheim, Carla Sonheim) Creative Photograph (B-Ok - Xyz) PDFDocument146 pages(Steve Sonheim, Carla Sonheim) Creative Photograph (B-Ok - Xyz) PDFMihai PopNo ratings yet
- Computer Vision - Image Formation (Camera) - 1Document27 pagesComputer Vision - Image Formation (Camera) - 1Lê Thành TrungNo ratings yet
- TrackingDocument34 pagesTrackingsantoshchapaneriNo ratings yet
- Projections and Camera Calibration: Man-522: Computer Vision SET-2Document98 pagesProjections and Camera Calibration: Man-522: Computer Vision SET-2Planetary RunnerNo ratings yet
- FittingDocument24 pagesFittingsantoshchapaneriNo ratings yet
- 02Document48 pages02Yogesh KatreNo ratings yet
- Basic Mathematics of ProjectionDocument63 pagesBasic Mathematics of ProjectionAidan CelesteNo ratings yet
- Why Study Computer Vision?: - Images and Movies Are Everywhere - Fast-Growing Collection of Useful ApplicationsDocument45 pagesWhy Study Computer Vision?: - Images and Movies Are Everywhere - Fast-Growing Collection of Useful ApplicationsmazzkhindaNo ratings yet
- Why Study Computer Vision?: - Images and Movies Are Everywhere - Fast-Growing Collection of Useful ApplicationsDocument45 pagesWhy Study Computer Vision?: - Images and Movies Are Everywhere - Fast-Growing Collection of Useful ApplicationsDharm RajNo ratings yet
- Measuring Height: T B R R B TDocument51 pagesMeasuring Height: T B R R B TПавел СоколовNo ratings yet
- Canonical View Volume Orthographic Projection Perspective Projection Shirley Chapter 7Document30 pagesCanonical View Volume Orthographic Projection Perspective Projection Shirley Chapter 7SHYRA APRIL JOY DELA CRUZNo ratings yet
- RadiometryDocument20 pagesRadiometrysantoshchapaneriNo ratings yet
- Image Formation: DD2423 Image Analysis and Computer VisionDocument45 pagesImage Formation: DD2423 Image Analysis and Computer VisionTrọng QuảngNo ratings yet
- L2 Images 2018Document83 pagesL2 Images 2018Bonie LabadanNo ratings yet
- L2 ImageFormationRepresentationDocument69 pagesL2 ImageFormationRepresentationAndreea TicalaNo ratings yet
- Perspective ProjectionDocument44 pagesPerspective ProjectionMatteo ValentiNo ratings yet
- CV - Image FormationDocument28 pagesCV - Image FormationMaa SeeNo ratings yet
- Lect 7Document59 pagesLect 7Duong TheNo ratings yet
- CV NotesDocument204 pagesCV NotesEthicalHacker.com.No ratings yet
- 02-Camera and Image Formation-2023Document71 pages02-Camera and Image Formation-2023evelynNo ratings yet
- Dpatra 3D Vision and Geometry NewDocument89 pagesDpatra 3D Vision and Geometry NewRitunjay GuptaNo ratings yet
- 0 HumanVisionDocument50 pages0 HumanVisionSantiago MárquezNo ratings yet
- 3D Reconstruction: Standard Stereo SetupDocument17 pages3D Reconstruction: Standard Stereo SetupAnukriti BansalNo ratings yet
- Ray Casting 1Document14 pagesRay Casting 1Jovana KnezevicNo ratings yet
- The Three Main Issues in Tracking: Computer Vision - A Modern Approach Set: Tracking Slides by D.A. ForsythDocument34 pagesThe Three Main Issues in Tracking: Computer Vision - A Modern Approach Set: Tracking Slides by D.A. ForsythelnovazNo ratings yet
- CG - Unit - V 2020Document26 pagesCG - Unit - V 2020Arun ArunNo ratings yet
- Cameras Stereo 17 InkDocument87 pagesCameras Stereo 17 Inkshiva chowdaryNo ratings yet
- Computer Vision: Spring 2006 15-385,-685 Instructor: S. Narasimhan Wean 5403 T-R 3:00pm - 4:20pmDocument39 pagesComputer Vision: Spring 2006 15-385,-685 Instructor: S. Narasimhan Wean 5403 T-R 3:00pm - 4:20pmramnbantunNo ratings yet
- Lect 2Document30 pagesLect 2Hermain KarimNo ratings yet
- Chapter2 Image FormationDocument68 pagesChapter2 Image FormationGhassan HasnainNo ratings yet
- 41 Image Motion enDocument44 pages41 Image Motion engariNo ratings yet
- Cameras and Projection: Starts at 2:40pmDocument61 pagesCameras and Projection: Starts at 2:40pmHugo Leandro PendragonsNo ratings yet
- Color and Image Formation 2Document40 pagesColor and Image Formation 2Kom ChegNo ratings yet
- Chapter 4 ViewingDocument32 pagesChapter 4 ViewingKay KhineNo ratings yet
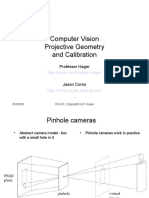
- Computer Vision Projective Geometry and Calibration: Professor HagerDocument67 pagesComputer Vision Projective Geometry and Calibration: Professor Hagersab108No ratings yet
- Lec 9Document51 pagesLec 9Saad khalilNo ratings yet
- Image Formation in Man and MachinesDocument45 pagesImage Formation in Man and MachinessatyabashaNo ratings yet
- 2.5. Curved Mirror LessonDocument44 pages2.5. Curved Mirror Lesson6h4gxcf7jbNo ratings yet
- ProjectionsDocument9 pagesProjectionsstrrrweNo ratings yet
- Formação Da ImagemDocument59 pagesFormação Da ImagemHugo Leandro PendragonsNo ratings yet
- Prob SegmentationDocument33 pagesProb SegmentationsantoshchapaneriNo ratings yet
- Camera Geometry Alignment FinalDocument118 pagesCamera Geometry Alignment FinalLino García MoralesNo ratings yet
- 02 Camera GeometryDocument95 pages02 Camera GeometryharitNo ratings yet
- Stereo 3d VisionDocument53 pagesStereo 3d Visionatom tuxNo ratings yet
- CSC320L05Document118 pagesCSC320L05Anu S SNo ratings yet
- Lecture08 Restoration DeblurDocument27 pagesLecture08 Restoration DeblurMinu ChoudharyNo ratings yet
- 26 StereoDocument39 pages26 StereoxolraxNo ratings yet
- L8 Fundamental of Imgae FormationDocument27 pagesL8 Fundamental of Imgae FormationApple ForScaleNo ratings yet
- CBSE Class 10 Science Light-Reflection and RefractionDocument18 pagesCBSE Class 10 Science Light-Reflection and RefractionFredrick RodriguesNo ratings yet
- Structured Light: Matt Waibel COMP 290-075 4-17-2000Document18 pagesStructured Light: Matt Waibel COMP 290-075 4-17-2000Khaled Waly AhlawyNo ratings yet
- Powerpoint - PAP - Light Waves Reflection and MirrorsDocument24 pagesPowerpoint - PAP - Light Waves Reflection and MirrorsAtharvvaNo ratings yet
- The Camera: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005Document46 pagesThe Camera: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005Sumesh VijayanNo ratings yet
- Fundamentals of Image FormationDocument27 pagesFundamentals of Image FormationAnonymous CRG5KmNo ratings yet
- Spherical Mirrors: Concave MirrorDocument3 pagesSpherical Mirrors: Concave MirrorLeah ClovisNo ratings yet
- Cameras and GeometryDocument49 pagesCameras and GeometryOscar PetersNo ratings yet
- 03 FeaturesDocument84 pages03 FeaturesAnonimo Um WNo ratings yet
- CS4670: Computer Vision: Lecture 5: Feature Detection and MatchingDocument46 pagesCS4670: Computer Vision: Lecture 5: Feature Detection and MatchingDanni LeNo ratings yet
- Image Warping and Morphing: Olivier Gondry's VisitDocument18 pagesImage Warping and Morphing: Olivier Gondry's VisitAngélica MercadoNo ratings yet
- Report For Science 10 PETA (3rd Quarter)Document33 pagesReport For Science 10 PETA (3rd Quarter)luistabaganNo ratings yet
- Introduction To Robot Vision: Ziv Yaniv Computer Aided Interventions and Medical Robotics, Georgetown UniversityDocument28 pagesIntroduction To Robot Vision: Ziv Yaniv Computer Aided Interventions and Medical Robotics, Georgetown UniversityVishnu PriyanNo ratings yet
- Vanishing Point: Exploring the Limits of Vision: Insights from Computer ScienceFrom EverandVanishing Point: Exploring the Limits of Vision: Insights from Computer ScienceNo ratings yet
- PTAB Core Photonics Patent AppealDocument16 pagesPTAB Core Photonics Patent AppealMike WuertheleNo ratings yet
- Three ColorCamera TheThreeColorProcessDocument16 pagesThree ColorCamera TheThreeColorProcessAli PhazerNo ratings yet
- CANON EOS 350D Service and PartsDocument200 pagesCANON EOS 350D Service and PartsDr. Stan Wardel BA, MA, MChem, MBA, DPhil, DSc.0% (1)
- Tehnički List Za Endoskopsku KameruDocument5 pagesTehnički List Za Endoskopsku KameruElnurNo ratings yet
- Photography Dictionery - Complete TerminologyDocument63 pagesPhotography Dictionery - Complete Terminologynimish100% (1)
- S H 2 Grace Term SchemeDocument47 pagesS H 2 Grace Term SchemeAreli BalamiNo ratings yet
- DH HAC T1A21P Datasheet 20220506Document3 pagesDH HAC T1A21P Datasheet 20220506Francisco J. MoyaNo ratings yet
- Sumber: Wolf P.R, and Dewitt B.A., 2000. Elements of Photogrammetry With Applications in Gis, 3Rd Edition, Mcgraw-Hill. Chapt. 6Document1 pageSumber: Wolf P.R, and Dewitt B.A., 2000. Elements of Photogrammetry With Applications in Gis, 3Rd Edition, Mcgraw-Hill. Chapt. 6wahyu soleh setiajiNo ratings yet
- Jvs-n933-Kdl-pe 3mp Full-Color Audio Poe Ip CameraDocument1 pageJvs-n933-Kdl-pe 3mp Full-Color Audio Poe Ip Cameraashiq.selNo ratings yet
- Galaxy v23n03 1965-02Document197 pagesGalaxy v23n03 1965-02moenobody100% (1)
- User Guide: Luxxor Video MicroscopeDocument14 pagesUser Guide: Luxxor Video MicroscopeCarlos RamirezNo ratings yet
- Fluke Temperature InspectionDocument40 pagesFluke Temperature Inspectionmikael_kristianNo ratings yet
- Koni-Omega Rapid PDFDocument25 pagesKoni-Omega Rapid PDFHabibiy StauffanbergNo ratings yet
- Hikvision Ds 2cd1141 I Dome CameraDocument3 pagesHikvision Ds 2cd1141 I Dome CameraMohammed AliNo ratings yet
- Product Sheet - Ekr 500 Digital (En)Document2 pagesProduct Sheet - Ekr 500 Digital (En)Habib RajuNo ratings yet
- Apollo-Soyuz Pamphlet No. 5 The Earth From OrbitDocument68 pagesApollo-Soyuz Pamphlet No. 5 The Earth From OrbitBob AndrepontNo ratings yet
- Rubric PinholeDocument2 pagesRubric PinholejcecilNo ratings yet
- Canon F1 System HandbookDocument20 pagesCanon F1 System HandbookDavid EgerNo ratings yet
- IK-M44H: Instruction ManualDocument1 pageIK-M44H: Instruction ManualArian SandinNo ratings yet
- Canon ManualDocument220 pagesCanon ManualMúsico de SáNo ratings yet
- REQUIRED - Nelson, ACM Siggraph, July 1980, Optical Printing in Computer AnimationDocument7 pagesREQUIRED - Nelson, ACM Siggraph, July 1980, Optical Printing in Computer AnimationlydiaNo ratings yet
- Americancinematographer11 1930 12Document54 pagesAmericancinematographer11 1930 12Carlos de Menezes CastroNo ratings yet
- Bfi Glossary of Film Language TermsDocument3 pagesBfi Glossary of Film Language TermsyouarecoolNo ratings yet
- Cgarena Feb06 IssueDocument50 pagesCgarena Feb06 Issuecellmerah100% (1)
- 11 Tips To Help You Master Candid Photography: PhotzyDocument35 pages11 Tips To Help You Master Candid Photography: PhotzyDionysis AssimacopoulosNo ratings yet
- NPL Testing Demonstrates The Flir Gf320 Meets Epa Ooooa StandardsDocument2 pagesNPL Testing Demonstrates The Flir Gf320 Meets Epa Ooooa StandardsjimmymorelosNo ratings yet
- Zeiss Ikon CamerasDocument54 pagesZeiss Ikon CamerasJUAN MIGUELNo ratings yet
- Axis q6225 Le PTZ Camera en US 397916Document3 pagesAxis q6225 Le PTZ Camera en US 397916Ahmed KhaledNo ratings yet