You might also like
- Introduction to Machine Protection FunctionsDocument14 pagesIntroduction to Machine Protection FunctionsAbdelsalam ElhaffarNo ratings yet
- A Setting-Free Approach To Detecting Loss of Excitation in Synchronous GeneratorsDocument24 pagesA Setting-Free Approach To Detecting Loss of Excitation in Synchronous GeneratorsGhaith AlqudahNo ratings yet
- Excitation SystemDocument38 pagesExcitation SystemRaja Ramachandran100% (1)
- Electrical conductors in a magnetic field: An overview of excitation systemsDocument12 pagesElectrical conductors in a magnetic field: An overview of excitation systemsDdumbaNo ratings yet
- Report on excitation system of Neelum Jehlum Hydro Power ProjectDocument12 pagesReport on excitation system of Neelum Jehlum Hydro Power ProjectAmeer Hamza100% (1)
- Monthly Progress Report 20 May 20Document25 pagesMonthly Progress Report 20 May 20SBILALAHMEDNo ratings yet
- Excitation SystemDocument38 pagesExcitation Systemlrpatra50% (2)
- Out-Of-step Protection For Generators GER-3179Document28 pagesOut-Of-step Protection For Generators GER-3179robertoseniorNo ratings yet
- Static Excitation SystemDocument36 pagesStatic Excitation Systemlrpatra100% (1)
- Tribhuvan UniversityDocument14 pagesTribhuvan UniversitySudhakar ShresthaNo ratings yet
- Generator ExcitationDocument51 pagesGenerator ExcitationHari Krishna.M100% (5)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- GTU ProtectDocument15 pagesGTU ProtectFaisal100% (1)
- Wind Turbine Efficiency and Grid Code Requirements: Dr. Arshad Ali Assistant ProfessorDocument35 pagesWind Turbine Efficiency and Grid Code Requirements: Dr. Arshad Ali Assistant ProfessorIbn e Adam100% (1)
- 3.0 Expt No 03Document4 pages3.0 Expt No 03YASH KHATPENo ratings yet
- Modelling Excitation & Speed Control SystemsDocument73 pagesModelling Excitation & Speed Control Systemshabte gebreial shrashrNo ratings yet
- Gen - Prot WcpyrtDocument17 pagesGen - Prot WcpyrtAshwinKumar GoswamiNo ratings yet
- What Is Excitation System - Definition & Types of Excitation System - Circuit GlobeDocument11 pagesWhat Is Excitation System - Definition & Types of Excitation System - Circuit GlobeSabaMannan123No ratings yet
- Excitation Systems: Raman JainDocument15 pagesExcitation Systems: Raman JainrohitctppNo ratings yet
- Modeling and Analysis of The Synchronous Generators Excitation SystemsDocument7 pagesModeling and Analysis of The Synchronous Generators Excitation Systemsni60No ratings yet
- Mod 1 Lec 3 - Protection Paradigms SystemDocument23 pagesMod 1 Lec 3 - Protection Paradigms Systemjck07No ratings yet
- Excitation SystemDocument59 pagesExcitation SystemVenkat Cherukuri100% (2)
- 03 Definition - Classification of Power System Stability IEEE-CIGRE Joint Task Force On Stability Terms and DefinitionsDocument63 pages03 Definition - Classification of Power System Stability IEEE-CIGRE Joint Task Force On Stability Terms and DefinitionsRosa Elvira Montalvo MartínezNo ratings yet
- Loss of Excitation of Synchronous GeneratorDocument7 pagesLoss of Excitation of Synchronous GeneratorHUGO JOSÉ MONTERROZA ARRIETANo ratings yet
- Generator ProtectionDocument5 pagesGenerator ProtectionBala MNo ratings yet
- Loss of Excitation Protection for Synchronous GeneratorsDocument14 pagesLoss of Excitation Protection for Synchronous GeneratorsPraveen PeethambaranNo ratings yet
- MATLAB-Simulink Based Analysis ofDocument4 pagesMATLAB-Simulink Based Analysis ofAmare KassawNo ratings yet
- What Is The Scope of Electrical EngineeringDocument9 pagesWhat Is The Scope of Electrical EngineeringMahesh NidumoluNo ratings yet
- Lossofexcitation 130805045350 Phpapp01Document52 pagesLossofexcitation 130805045350 Phpapp01ahvaz1392bNo ratings yet
- Lecture Presentaion On Generator, Transformer, Motor and Transmission Line ProtectionDocument44 pagesLecture Presentaion On Generator, Transformer, Motor and Transmission Line Protectionzeeshanraja100% (1)
- Lec7 Generator ProtectionDocument53 pagesLec7 Generator ProtectionEVTNo ratings yet
- Classification of Different Faults in Stator of An AlternatorDocument8 pagesClassification of Different Faults in Stator of An AlternatortusharrsangoleNo ratings yet
- Power System Operation and ControlDocument175 pagesPower System Operation and Controladam sharma83% (6)
- ExcitationDocument4 pagesExcitationDan GrayNo ratings yet
- ExcitationDocument4 pagesExcitationDan GrayNo ratings yet
- Lecture 5Document23 pagesLecture 5Abdalla NasserNo ratings yet
- ELECTRICAL MACHINES TOPICSDocument22 pagesELECTRICAL MACHINES TOPICSJoshtyler 21No ratings yet
- IEEE paper examines generator and excitation systems for reliable power in process plantsDocument10 pagesIEEE paper examines generator and excitation systems for reliable power in process plantsJorge VallejosNo ratings yet
- NERC Protection System Protection Fundamentals Public 060210Document55 pagesNERC Protection System Protection Fundamentals Public 060210srinivasaphanikiranNo ratings yet
- Transient Stability Analysis of Multi-Machine Power SystemsDocument4 pagesTransient Stability Analysis of Multi-Machine Power SystemsrdelgranadoNo ratings yet
- Relay CoordinationDocument68 pagesRelay CoordinationrajuNo ratings yet
- Generator Protection SystemDocument31 pagesGenerator Protection Systemmuaz_aminu1422100% (1)
- Chapter TwoDocument85 pagesChapter Twohabte gebreial shrashrNo ratings yet
- A Novel Flux Based Method For Synchronous Generator Loss of ExcitationDocument14 pagesA Novel Flux Based Method For Synchronous Generator Loss of ExcitationhmortNo ratings yet
- Electric Power Generation and Excitation SystemDocument20 pagesElectric Power Generation and Excitation SystemMansen NsubugaNo ratings yet
- Eee-Viii-Power System Operation and Control (10ee82) - Notes PDFDocument130 pagesEee-Viii-Power System Operation and Control (10ee82) - Notes PDFKvv Bapiraju81% (21)
- Excitation System Models of Synchronous GeneratorDocument11 pagesExcitation System Models of Synchronous Generatoryasynaslam186No ratings yet
- Unit V 1. Define Matrix Converter and Mention It Application. Matrix Converter ConceptDocument5 pagesUnit V 1. Define Matrix Converter and Mention It Application. Matrix Converter Conceptsambu112No ratings yet
- Karnataka Govt. Evening Polytechnic Generator ProtectionsDocument14 pagesKarnataka Govt. Evening Polytechnic Generator ProtectionsKishore KNo ratings yet
- Electric Protection System in Thermal Power PlantsDocument17 pagesElectric Protection System in Thermal Power PlantsPriyatham GangapatnamNo ratings yet
- Practical Introduction To Power System Protection & ControlDocument94 pagesPractical Introduction To Power System Protection & Controlriogomes73% (11)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- MID - Protection Exam - Winter - 2019 - 2020Document4 pagesMID - Protection Exam - Winter - 2019 - 2020Ghaith AlqudahNo ratings yet
- Questio N 1 2 3 4 5 6 7 8 9 10 Answer Questio N 11 12 13 14 15 16 17 18 19 20 AnswerDocument5 pagesQuestio N 1 2 3 4 5 6 7 8 9 10 Answer Questio N 11 12 13 14 15 16 17 18 19 20 AnswerGhaith AlqudahNo ratings yet
- Questio N 1 2 3 4 5 6 7 8 9 10 Answer Questio N 11 12 13 14 15 16 17 18 19 20 AnswerDocument5 pagesQuestio N 1 2 3 4 5 6 7 8 9 10 Answer Questio N 11 12 13 14 15 16 17 18 19 20 AnswerGhaith AlqudahNo ratings yet
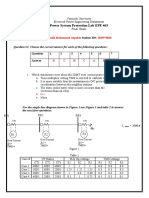
- Power System Protection Lab EPE 463: Question #1: Choose The Correct Answer For Each of The Following QuestionsDocument6 pagesPower System Protection Lab EPE 463: Question #1: Choose The Correct Answer For Each of The Following QuestionsGhaith AlqudahNo ratings yet
- Pronuciation - Word Stress ExerciseDocument2 pagesPronuciation - Word Stress ExerciseLan Anh MaiNo ratings yet
- Sean Catchpole: Spore Web InternDocument1 pageSean Catchpole: Spore Web InternsunseanNo ratings yet
- CCCU Foundation Study Skills Assignment BriefDocument12 pagesCCCU Foundation Study Skills Assignment BriefBaciu DanielNo ratings yet
- Grade 9 q3 Module 1 EditedDocument15 pagesGrade 9 q3 Module 1 EditedOnil PagutayaoNo ratings yet
- Survey of Old Mongolian Monasteries and Temples in UlaanbaatarDocument183 pagesSurvey of Old Mongolian Monasteries and Temples in UlaanbaatarUB OtgonNo ratings yet
- (Journal) AN INNER QUALITY APPROACH TO REDUCINGDocument9 pages(Journal) AN INNER QUALITY APPROACH TO REDUCINGMery SanavieNo ratings yet
- TLE 6 Q4 WK8 MultimediaPresentation v0.1Document7 pagesTLE 6 Q4 WK8 MultimediaPresentation v0.1Christian Vincent Tampus AliñoNo ratings yet
- ERAB Licence Limit DescriptionDocument2 pagesERAB Licence Limit DescriptionsrimantaNo ratings yet
- Mbamission Letters of Recommendation GuideDocument26 pagesMbamission Letters of Recommendation GuideSean PennNo ratings yet
- LogicDocument6 pagesLogicpppppiiiiiNo ratings yet
- Daya Dan Gerakan: Force and MotionDocument21 pagesDaya Dan Gerakan: Force and MotionzinziemeewahNo ratings yet
- CBC-Tailoring NC IIDocument66 pagesCBC-Tailoring NC IICharmaine Mae RetizaNo ratings yet
- EFDC - Explorer Users Manual (040416-Draft)Document74 pagesEFDC - Explorer Users Manual (040416-Draft)Jongjib ParkNo ratings yet
- Management Science Chapter 11Document42 pagesManagement Science Chapter 11Myuran SivarajahNo ratings yet
- Boiler Tube FailuresDocument15 pagesBoiler Tube FailuresBIRANCHINo ratings yet
- CHOOSING NAIA PaperDocument6 pagesCHOOSING NAIA PaperElyssa DaggettNo ratings yet
- GSS5 Rising Main Condition Assessment and Risk Management ManualDocument2 pagesGSS5 Rising Main Condition Assessment and Risk Management ManualNickNo ratings yet
- Amorphous Solid Dispersions PDFDocument702 pagesAmorphous Solid Dispersions PDFLuisNo ratings yet
- Experiment No.5 Forced Convection: Heat Transfer Laboratory (MECH3123)Document6 pagesExperiment No.5 Forced Convection: Heat Transfer Laboratory (MECH3123)Raj PratyushNo ratings yet
- Jongka:the Traditional Korean Family: Exploring Jongka Food in The Context of Korean Food CategoriesDocument14 pagesJongka:the Traditional Korean Family: Exploring Jongka Food in The Context of Korean Food CategoriesSözen BayraktarNo ratings yet
- Learner's Activity Sheet: Mathematics (Quarter III - Week 6-7)Document13 pagesLearner's Activity Sheet: Mathematics (Quarter III - Week 6-7)Bai Shalimar PantaranNo ratings yet
- Venn DiagramDocument9 pagesVenn DiagramMyla Nazar OcfemiaNo ratings yet
- Major Report Wood LumberDocument45 pagesMajor Report Wood LumberTorreja JonjiNo ratings yet
- Module 4 - Contemp World - BSA2Document7 pagesModule 4 - Contemp World - BSA2Marian AntipoloNo ratings yet
- FlashFire: Overcoming The Performance Bottleneck of Flash Storage TechnologyDocument13 pagesFlashFire: Overcoming The Performance Bottleneck of Flash Storage Technologyalcuin99No ratings yet
- Control Manual 30RB - RQ - LR 1Document36 pagesControl Manual 30RB - RQ - LR 1Iwan SetiawanNo ratings yet
- Bulk Storage Optimization for Large QuantitiesDocument3 pagesBulk Storage Optimization for Large Quantitiesbirojivenkat100% (1)
- Evolution - The Dissent of DarwinDocument7 pagesEvolution - The Dissent of DarwinluminitalupuliasaNo ratings yet
- Implantable Technology: History, Controversies, and Social ImplicationsDocument11 pagesImplantable Technology: History, Controversies, and Social ImplicationssolomongNo ratings yet
- Module 2 - Individual BehaviourDocument187 pagesModule 2 - Individual BehaviourBiswajeet DashNo ratings yet