You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Aether Gravity TechnologyDocument328 pagesAether Gravity Technologyrossix1100% (2)
- Electrical Machines 1 2 Lab ManualDocument47 pagesElectrical Machines 1 2 Lab ManualJom Ancheta BautistaNo ratings yet
- (M1-LAB) Lab Activity 1 - The DC Series MotorDocument8 pages(M1-LAB) Lab Activity 1 - The DC Series MotorJhon Lhoyd CorpuzNo ratings yet
- Physcis Ac Generator ReportDocument15 pagesPhyscis Ac Generator ReportVishal HirrtikNo ratings yet
- Science Activity Sheet: Quarter 2 - MELC 6 Week 8Document9 pagesScience Activity Sheet: Quarter 2 - MELC 6 Week 8Maribel Lebuna Cuello100% (1)
- DC Motor Speed Control Using C++Document77 pagesDC Motor Speed Control Using C++eraditya2001100% (11)
- PEE 9 - Electrical Machines 2 Lec CoEDocument6 pagesPEE 9 - Electrical Machines 2 Lec CoEfen.barlisanNo ratings yet
- VIB Booklet ENDocument36 pagesVIB Booklet ENPetra HeutsNo ratings yet
- Optimal Design For Torque Motor of Jet Pipe Electro-Hydraulic Servo-Val e Based On Dynamic Stiffness VDocument4 pagesOptimal Design For Torque Motor of Jet Pipe Electro-Hydraulic Servo-Val e Based On Dynamic Stiffness Vbryan andres mora ramosNo ratings yet
- Electro-Hydraulics: Prepared by Approved byDocument51 pagesElectro-Hydraulics: Prepared by Approved byPrakash KumarNo ratings yet
- Caterpillar Cat 245B SERIES II EXCAVATOR (Prefix 6MF) Service Repair Manual (6MF00513 and Up)Document27 pagesCaterpillar Cat 245B SERIES II EXCAVATOR (Prefix 6MF) Service Repair Manual (6MF00513 and Up)rpoy9396615No ratings yet
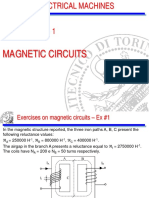
- Exercises On ELECTRICAL MACHINESDocument29 pagesExercises On ELECTRICAL MACHINESDavide100% (1)
- TE - Electrical - Sullabus - 2019 Course - 28.07.2021Document48 pagesTE - Electrical - Sullabus - 2019 Course - 28.07.2021Shah FaisalNo ratings yet
- Aircraft Electrics - DC GeneratorsDocument16 pagesAircraft Electrics - DC GeneratorsErica Zoe BantogNo ratings yet
- AlternatorDocument13 pagesAlternatorPratikTiwari0% (1)
- 3 - DC Motor CharacteristicsDocument11 pages3 - DC Motor CharacteristicsSUCHIN AnandNo ratings yet
- Troubeshootings 8 Wheeler DHTC Detc-1Document27 pagesTroubeshootings 8 Wheeler DHTC Detc-1khan11k100% (1)
- DC Motor Drives: MotorsDocument16 pagesDC Motor Drives: MotorsAshutosh TomarNo ratings yet
- CH - 5 Synchronous MachinesDocument28 pagesCH - 5 Synchronous MachinesNAHOM ANTENEHNo ratings yet
- Feedback Linearized Model of DC Motor Using Differential GeometryDocument6 pagesFeedback Linearized Model of DC Motor Using Differential GeometryIfrah ParvezNo ratings yet
- Series and Shunt DC MotorsDocument2 pagesSeries and Shunt DC Motorsboj VillanuevaNo ratings yet
- Transformer & Speed Voltages PDFDocument41 pagesTransformer & Speed Voltages PDFAbhishek KumarNo ratings yet
- Igate BMX User Manual V2Document9 pagesIgate BMX User Manual V2Mario Alfredo ChiramberroNo ratings yet
- Edited Em-III Lecture Notes 0Document44 pagesEdited Em-III Lecture Notes 0S.ayeeshaNo ratings yet
- 4-Generador Magnaplus-2Document22 pages4-Generador Magnaplus-2sorangel_123No ratings yet
- Research Paper On DC Motor ControlDocument8 pagesResearch Paper On DC Motor Controlfvgjcq6aNo ratings yet
- 45 24985 EE328 2016 1 2 1 Lecture2all PDFDocument26 pages45 24985 EE328 2016 1 2 1 Lecture2all PDFHoppohigdi786 Hoppohigdi786No ratings yet
- Usn 2 B V: UNIT-II and Any ONE Full Question From UNIT-III. Use of Heat and Mass Transfer Data Hand Book Is PermittedDocument6 pagesUsn 2 B V: UNIT-II and Any ONE Full Question From UNIT-III. Use of Heat and Mass Transfer Data Hand Book Is PermittedAkshay ArksaliNo ratings yet
- ELECTROMAGNETISMDocument39 pagesELECTROMAGNETISMAgnibho GuruNo ratings yet
- Ee 2022Document9 pagesEe 2022LATIGAR, JEFFERSON 0.No ratings yet