You might also like
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Unit 4 Design and Synthesis of Datapath Controllers: Department of Communication Engineering, NCTUDocument25 pagesUnit 4 Design and Synthesis of Datapath Controllers: Department of Communication Engineering, NCTUThắng HuỳnhNo ratings yet
- Design and Implementation of UartDocument21 pagesDesign and Implementation of Uartbhanu455No ratings yet
- ASMD Based Design: UART TransmitterDocument19 pagesASMD Based Design: UART Transmittermisss123100% (1)
- Serial CommunicationsDocument23 pagesSerial CommunicationsPhuoc Trung Tran100% (1)
- Dire Dawa University Institute of TechnologyDocument28 pagesDire Dawa University Institute of TechnologyAsed ZakirNo ratings yet
- Design of The Data Acquisition System Based On STM32: Information Technology and Quantitative Management (ITQM2013)Document7 pagesDesign of The Data Acquisition System Based On STM32: Information Technology and Quantitative Management (ITQM2013)Nguyễn Trọng TuyếnNo ratings yet
- Es Notes Unit 5Document33 pagesEs Notes Unit 51balamanianNo ratings yet
- Prof. Dr. Ahmet İhsan KUTLAR Prof. Dr. Nihat YILDIRIM Res. Assit - Eren ÖZKURDocument23 pagesProf. Dr. Ahmet İhsan KUTLAR Prof. Dr. Nihat YILDIRIM Res. Assit - Eren ÖZKURxxxNo ratings yet
- 2 MarkDocument15 pages2 MarkGowthamanNo ratings yet
- Design of RTU and SCADADocument10 pagesDesign of RTU and SCADAScada UcvNo ratings yet
- Baud Rate Generator:: Homework Assignment # 4Document5 pagesBaud Rate Generator:: Homework Assignment # 4Badrinath Balasubramanian100% (1)
- Design of The Data Acquisition System Based On STM32: Information Technology and Quantitative Management (ITQM2013)Document7 pagesDesign of The Data Acquisition System Based On STM32: Information Technology and Quantitative Management (ITQM2013)Josue Manuel Pareja ContrerasNo ratings yet
- UART ProtocolDocument6 pagesUART Protocolvimal rajNo ratings yet
- MT6603 DMS Unt 3 PDFDocument39 pagesMT6603 DMS Unt 3 PDFKarthi KeyanNo ratings yet
- Design and Research of CNC Platform Based On CAN BusDocument5 pagesDesign and Research of CNC Platform Based On CAN BusInternational Journal of Research in Engineering and ScienceNo ratings yet
- MAR Notes 3 - ATMega328PDocument6 pagesMAR Notes 3 - ATMega328PYupniatsNo ratings yet
- Project Report DASDocument59 pagesProject Report DASmknunwalNo ratings yet
- Project 2Document19 pagesProject 2Gaurav BaluNo ratings yet
- Unit-2: Data Acquisition System (DAS)Document10 pagesUnit-2: Data Acquisition System (DAS)Barun DhimanNo ratings yet
- Datalogger, Aws, Acd, TPWS, Etcs PDFDocument55 pagesDatalogger, Aws, Acd, TPWS, Etcs PDFvaranasilkoNo ratings yet
- Intellignt Instrumentation NotesDocument13 pagesIntellignt Instrumentation NotesBarun DhimanNo ratings yet
- Introduction To Microprocessor-Based ControlDocument42 pagesIntroduction To Microprocessor-Based ControlAhdan FawwazNo ratings yet
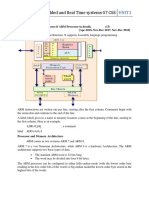
- Embedded and Real Time Systems-S7 CSE: Unit1Document15 pagesEmbedded and Real Time Systems-S7 CSE: Unit1Haseena BeeviNo ratings yet
- "Universal Asynchronous Receiver and Transmitter" (UART) : A Project Report OnDocument24 pages"Universal Asynchronous Receiver and Transmitter" (UART) : A Project Report Ondasari himajaNo ratings yet
- UARTDocument27 pagesUARTNaveen Kumar100% (1)
- Input Output InterfacesDocument21 pagesInput Output InterfacesBlackk SpydoNo ratings yet
- Untitled PresentationDocument22 pagesUntitled PresentationNITHYASREE K RNo ratings yet
- 6-Iriset S28 PDFDocument109 pages6-Iriset S28 PDFAnjaliTripathi75% (4)
- 5.UART Serial Communication Module Design and SimulationDocument4 pages5.UART Serial Communication Module Design and Simulationvenkatahari babuNo ratings yet
- Cdma Cdma BSCDocument63 pagesCdma Cdma BSCYengkokpamJoychandraNo ratings yet
- Computer Multitasking Real-Time ComputingDocument3 pagesComputer Multitasking Real-Time ComputingAlazar DInberuNo ratings yet
- Serial Port Communication in LabVIEWDocument5 pagesSerial Port Communication in LabVIEWDecker JamesNo ratings yet
- AR1719 AbstractDocument12 pagesAR1719 AbstractSarika KarwandeNo ratings yet
- Research Paper On Asynchronous Transfer ModeDocument6 pagesResearch Paper On Asynchronous Transfer Modefvhwd4yj100% (1)
- Chapter 16 - DSPDocument58 pagesChapter 16 - DSPMaira HaiderNo ratings yet
- Lec 8 PicDocument33 pagesLec 8 Picanjali lohanaNo ratings yet
- PLTS 2014Document25 pagesPLTS 2014cgrachanenNo ratings yet
- Cdma Cdma BSCDocument63 pagesCdma Cdma BSCWin LinnNo ratings yet
- Reference Material For EXP - 1Document26 pagesReference Material For EXP - 1Jatin YadavNo ratings yet
- Design and Implementation of Uart Serial CommunicationDocument19 pagesDesign and Implementation of Uart Serial CommunicationRam KrishnaNo ratings yet
- Distributed Control SystemsDocument24 pagesDistributed Control SystemsPraveen Madhusoodhanan100% (1)
- IJAER Ok 23043-23052Document10 pagesIJAER Ok 23043-23052vijayNo ratings yet
- Embedded Systems Lab04 USARTDocument12 pagesEmbedded Systems Lab04 USARTAimanNo ratings yet
- Unit6dspprocessor 140207205522 Phpapp02Document34 pagesUnit6dspprocessor 140207205522 Phpapp02Arun Kumar SNo ratings yet
- DSPDocument13 pagesDSPSayoshni Ghosh100% (1)
- Serial Communication Protocol:: Data Bit Communication Channel Computer Bus Parallel CommunicationDocument24 pagesSerial Communication Protocol:: Data Bit Communication Channel Computer Bus Parallel CommunicationAshalatha MadasuNo ratings yet
- C-Dot 256p An-Rax (Isdn) User ManualDocument50 pagesC-Dot 256p An-Rax (Isdn) User Manualbuban8888No ratings yet
- Delayed Branch Logic: Texas Instruments TMS320 Is A Blanket Name For A Series ofDocument13 pagesDelayed Branch Logic: Texas Instruments TMS320 Is A Blanket Name For A Series ofnomadcindrellaNo ratings yet
- By K. Praveen Kumar Asst. Prof in ECE Dept. GITAM University-HyderabadDocument24 pagesBy K. Praveen Kumar Asst. Prof in ECE Dept. GITAM University-HyderabadHariTejNo ratings yet
- وميض ضياء عبدالحسين MP applications report 8251A USARTDocument6 pagesوميض ضياء عبدالحسين MP applications report 8251A USARTWameed AlkamoosiNo ratings yet
- UartDocument25 pagesUartWajeed Mohamad100% (2)
- b4 Intro AllDocument82 pagesb4 Intro AllR INNo ratings yet
- Ewsd v16Document47 pagesEwsd v16Eugen BleulerNo ratings yet
- Base Band Modem Hardware Design: P. Antognoni, E. Sereni, S. Cacopardi, S. Carlini, M. ScafiDocument5 pagesBase Band Modem Hardware Design: P. Antognoni, E. Sereni, S. Cacopardi, S. Carlini, M. Scafikokome35No ratings yet
- Chapter 4Document30 pagesChapter 4udgam pandeyNo ratings yet
- Design and Implementation of UART Based On VerilogDocument7 pagesDesign and Implementation of UART Based On VeriloglabibatariqueNo ratings yet
- How To Set Up UART Communication On The ArduinoDocument22 pagesHow To Set Up UART Communication On The ArduinojackNo ratings yet
- Altera DDC DucDocument32 pagesAltera DDC DucgpraveenroyNo ratings yet
- 8051 CH10Document93 pages8051 CH10Murali KrishnaNo ratings yet
- ChatLog ANITS - ECE Online Workshop 2020 - 05 - 29 11 - 26Document3 pagesChatLog ANITS - ECE Online Workshop 2020 - 05 - 29 11 - 26Perumal NamasivayamNo ratings yet
- Vlsi Physicaldesign Notes 140429024300 Phpapp01Document35 pagesVlsi Physicaldesign Notes 140429024300 Phpapp01Raveen GulipuraNo ratings yet
- Nterconnect Odeling: M.Arvind 2 M.E MicroelectronicsDocument26 pagesNterconnect Odeling: M.Arvind 2 M.E MicroelectronicsPerumal NamasivayamNo ratings yet
- Interconnect Delay ModelsDocument16 pagesInterconnect Delay ModelsPerumal NamasivayamNo ratings yet
- GdsiiDocument46 pagesGdsiimanjunatha RNo ratings yet
- How To Convert Video Using VLCDocument6 pagesHow To Convert Video Using VLCSrg Perumal NamasivayamNo ratings yet
- PP RulesDocument2 pagesPP RulesPerumal NamasivayamNo ratings yet
- Boundaryscan Tutorial PDFDocument58 pagesBoundaryscan Tutorial PDFKiruthika MNo ratings yet
- Introduction To Asic DesignDocument53 pagesIntroduction To Asic DesignPerumal NamasivayamNo ratings yet
- Basic Optical Laws and DefinitionDocument13 pagesBasic Optical Laws and DefinitionPerumal NamasivayamNo ratings yet
- Innovate or Perish: FPGA Physical Design: Taraneh Taghavi, Soheil Ghiasi Abhishek Ranjan, Salil Raje Majid SarrafzadehDocument8 pagesInnovate or Perish: FPGA Physical Design: Taraneh Taghavi, Soheil Ghiasi Abhishek Ranjan, Salil Raje Majid SarrafzadehPerumal NamasivayamNo ratings yet
- Thermometric Lag: D. HarperDocument56 pagesThermometric Lag: D. HarperPerumal NamasivayamNo ratings yet
- Vlsi Physicaldesign Notes 140429024300 Phpapp01Document35 pagesVlsi Physicaldesign Notes 140429024300 Phpapp01Raveen GulipuraNo ratings yet
- Experiment 12:: SCR CharacteristicsDocument3 pagesExperiment 12:: SCR CharacteristicsPerumal NamasivayamNo ratings yet
- 2017 Open Elective ECE SyllabusDocument58 pages2017 Open Elective ECE SyllabusSam Suresh80% (10)
- Post Harvest Technology of Maize (Maize Processing) : Dr. U. D. ChavanDocument32 pagesPost Harvest Technology of Maize (Maize Processing) : Dr. U. D. ChavanPerumal NamasivayamNo ratings yet
- Thermometric Lag: D. HarperDocument56 pagesThermometric Lag: D. HarperPerumal NamasivayamNo ratings yet
- TemperatureDocument49 pagesTemperatureSriteja JosyulaNo ratings yet
- ChatLog ANITS ECE WORKSHOP DAY 2 2020 - 05 - 30 10 - 54Document3 pagesChatLog ANITS ECE WORKSHOP DAY 2 2020 - 05 - 30 10 - 54Perumal NamasivayamNo ratings yet
- Introduction To RAM: Random-Access Memory RAMDocument36 pagesIntroduction To RAM: Random-Access Memory RAMRaj KumarNo ratings yet
- Hfss PDFDocument23 pagesHfss PDFRavindra KumarNo ratings yet
- 2 Measurement+and+Error PDFDocument30 pages2 Measurement+and+Error PDFجعفرالشموسيNo ratings yet
- Piezoelectric Transducer: E.Karolinekersin Assistant ProfessorDocument28 pagesPiezoelectric Transducer: E.Karolinekersin Assistant ProfessorPerumal NamasivayamNo ratings yet
- ChatLog ANITS ECE WORKSHOP DAY 2 2020 - 05 - 30 12 - 56Document7 pagesChatLog ANITS ECE WORKSHOP DAY 2 2020 - 05 - 30 12 - 56Perumal NamasivayamNo ratings yet
- Digitized Pictures: by K. Karpoora Sundari ECE Department, K. Ramakrishnan College of Technology, SamayapuramDocument31 pagesDigitized Pictures: by K. Karpoora Sundari ECE Department, K. Ramakrishnan College of Technology, SamayapuramPerumal NamasivayamNo ratings yet
- ChatLog Dassault 2020 - 07 - 10 12 - 20Document1 pageChatLog Dassault 2020 - 07 - 10 12 - 20Perumal NamasivayamNo ratings yet
- ChatLog ANITS - ECE Online Workshop 2020 - 05 - 29 12 - 48Document4 pagesChatLog ANITS - ECE Online Workshop 2020 - 05 - 29 12 - 48Perumal NamasivayamNo ratings yet
- Fiber Optic SensorsDocument10 pagesFiber Optic SensorsPerumal NamasivayamNo ratings yet
- Audio and Video CompresssionDocument61 pagesAudio and Video Compresssionbharathivenkat25100% (1)
- Instalación y Configuración de MailWatcahDocument6 pagesInstalación y Configuración de MailWatcahLuis Miguel HDNo ratings yet
- Price List SocomecDocument28 pagesPrice List Socomecqwkerbk090909100% (18)
- Engine Oil LabelDocument6 pagesEngine Oil LabelCornel IordacheNo ratings yet
- Hagen Sean ResumeDocument1 pageHagen Sean ResumeShagen ShagenNo ratings yet
- StoDocument4 pagesStoaunhavcNo ratings yet
- Yamaha Tx816 Tx216 Service ManualDocument32 pagesYamaha Tx816 Tx216 Service ManualZoranNo ratings yet
- Infotech4reduced Unit1 Page5Document1 pageInfotech4reduced Unit1 Page5Петя ИвановNo ratings yet
- VSE+ Training - APTARE IT Analytics: ArchitectureDocument13 pagesVSE+ Training - APTARE IT Analytics: ArchitectureCCIE DetectNo ratings yet
- Edge II Service Manual P21828-02A eDocument96 pagesEdge II Service Manual P21828-02A eHellen NogueiraNo ratings yet
- ERP Project Management Is Key To A Successful ImplementationDocument24 pagesERP Project Management Is Key To A Successful ImplementationwaduroNo ratings yet
- Write and Wipe: PrimerDocument6 pagesWrite and Wipe: PrimerFunninhaNo ratings yet
- SoC Encounter TutorialDocument18 pagesSoC Encounter Tutorialsyncc500No ratings yet
- Ef3e Int Filetest 09bDocument5 pagesEf3e Int Filetest 09bItsel AlfaroNo ratings yet
- Á1058Ñ Analytical Instrument Qualification: First Supplement To USP 40-NF 35Document8 pagesÁ1058Ñ Analytical Instrument Qualification: First Supplement To USP 40-NF 35felipemolinajNo ratings yet
- Possible Practice Set AcnDocument2 pagesPossible Practice Set Acnnaresh ChoudharyNo ratings yet
- Automatic Detection of Blood Vessels in Digital Retinal Image Using CVIP ToolsDocument29 pagesAutomatic Detection of Blood Vessels in Digital Retinal Image Using CVIP ToolsPlacement.ece Velammal ITNo ratings yet
- Case Study - Sacking Social Media in College SportsDocument2 pagesCase Study - Sacking Social Media in College Sportselliot pickardNo ratings yet
- ProStream 9100 ReleaseDocument79 pagesProStream 9100 Releasediegoh_silva100% (1)
- LA206BADDocument8 pagesLA206BADbrushaNo ratings yet
- Controls and Instrument Engineer or Automation Engineer or DcsDocument3 pagesControls and Instrument Engineer or Automation Engineer or Dcsapi-79252446No ratings yet
- Primavera 106PDocument4 pagesPrimavera 106PbihaiauNo ratings yet
- S18 Series Sensors (AC Voltage) DatasheetDocument1 pageS18 Series Sensors (AC Voltage) DatasheetPaulomario RemuzgoNo ratings yet
- Welcome To The Course: T24 Introduction To SMS: Security Management System R16Document73 pagesWelcome To The Course: T24 Introduction To SMS: Security Management System R16adyani_0997100% (1)
- CHAPTER 7 CNCDocument12 pagesCHAPTER 7 CNCkornjudisticNo ratings yet
- Akbar Hayat CV 2 PDFDocument2 pagesAkbar Hayat CV 2 PDFMalik Akbar HayatNo ratings yet
- Modeling of Welded Connections in Solidworks Simulation: January 2011Document6 pagesModeling of Welded Connections in Solidworks Simulation: January 2011King1971No ratings yet
- Non Disclosure - BPS Technology GlobalDocument6 pagesNon Disclosure - BPS Technology GlobalcizarNo ratings yet
- NJM13600 NJM13700 eDocument6 pagesNJM13600 NJM13700 eavo638No ratings yet
- Employee Offboarding Checklist Template CurrentwareDocument8 pagesEmployee Offboarding Checklist Template CurrentwareChandra RaoNo ratings yet
- Mpplus™ V C: Olume OrrectorDocument2 pagesMpplus™ V C: Olume OrrectorPaul Ramos CarcaustoNo ratings yet