You might also like
- Cold Work Permit Hse-PtwDocument2 pagesCold Work Permit Hse-PtwHSE S478% (9)
- Chapter 3Document14 pagesChapter 3vallabha kaustubhaNo ratings yet
- Two-Dimensional Geometric TransformationsDocument41 pagesTwo-Dimensional Geometric Transformationsreem goNo ratings yet
- Lecture6 CG 04 2D Transformations 2021#1 UpdatedDocument19 pagesLecture6 CG 04 2D Transformations 2021#1 Updatedsanegool55No ratings yet
- 2d Transformation PDFDocument17 pages2d Transformation PDFNamit JainNo ratings yet
- Geometric Modelling CAD CAM 2021session 3Document36 pagesGeometric Modelling CAD CAM 2021session 3Aleena FarhanNo ratings yet
- Lecture 06Document66 pagesLecture 06zaidNo ratings yet
- Unit 2 - Part 1Document74 pagesUnit 2 - Part 1A1FA MSKNo ratings yet
- Module 3 - 2D Transformations - 1Document91 pagesModule 3 - 2D Transformations - 1Rajeswari RNo ratings yet
- Basic TransformationDocument10 pagesBasic TransformationsamNo ratings yet
- 2-D Geometry: TransformationsDocument14 pages2-D Geometry: TransformationsSumit Kumar VohraNo ratings yet
- Chapter 4 PDFDocument24 pagesChapter 4 PDFirusha100% (1)
- Section 9.5 MADocument25 pagesSection 9.5 MAsavage.princesskikiNo ratings yet
- GM Unit 2Document19 pagesGM Unit 2SathyapriyaNo ratings yet
- 03 2D-3D GeometryDocument77 pages03 2D-3D GeometryTuseeq RazaNo ratings yet
- TOPIC 2 TransformationDocument28 pagesTOPIC 2 Transformationjonathanmaithya9No ratings yet
- CG 3Document10 pagesCG 3sefefe hunegnawNo ratings yet
- Computer Notes 2D Transformations IDocument5 pagesComputer Notes 2D Transformations IecomputernotesNo ratings yet
- 2D TransformsDocument33 pages2D TransformssyriluitNo ratings yet
- CG Exp5 C28Document24 pagesCG Exp5 C28Prathmesh GaikwadNo ratings yet
- Lecture 4 - Robot CoordinatesDocument34 pagesLecture 4 - Robot CoordinatesCamilo HerreraNo ratings yet
- Chapter Five GraphicsDocument37 pagesChapter Five GraphicswalelegneNo ratings yet
- 2d TransformationDocument34 pages2d TransformationNayanjyot SinghNo ratings yet
- Cim 23.6Document81 pagesCim 23.6RajeshKumarNo ratings yet
- Anna's AssignmentDocument16 pagesAnna's Assignmenttumaini murrayNo ratings yet
- 2D TransformationDocument91 pages2D Transformationvishwajeet patilNo ratings yet
- (X1-X2, Y1-Y2), Where (X1, Y1) Are Coordinates of TheDocument4 pages(X1-X2, Y1-Y2), Where (X1, Y1) Are Coordinates of TheAshima ChopraNo ratings yet
- Rotation: by Amjad Khan Khalil Amjad@aup - Edu.pk Amjad@kardan - Edu.afDocument13 pagesRotation: by Amjad Khan Khalil Amjad@aup - Edu.pk Amjad@kardan - Edu.afSultan Masood NawabzadaNo ratings yet
- 04.TwoDimensional Transformations MCADocument67 pages04.TwoDimensional Transformations MCAashwiniNo ratings yet
- Computer Graphics 3: 2D Transformations: Downloaded FromDocument46 pagesComputer Graphics 3: 2D Transformations: Downloaded Frombharat_csm11No ratings yet
- Basic TransformationsDocument4 pagesBasic TransformationsshubhamNo ratings yet
- CG Chapter 5Document15 pagesCG Chapter 5rajmaisuria111No ratings yet
- CAED KJHA 2d TransformationDocument114 pagesCAED KJHA 2d TransformationAnu SinghNo ratings yet
- Unit 4 2D Transformations - CG - PUDocument18 pagesUnit 4 2D Transformations - CG - PUrupak dangiNo ratings yet
- Slope-Intercept Form: (A and B Cannot Both Be 0)Document3 pagesSlope-Intercept Form: (A and B Cannot Both Be 0)Femie SurNo ratings yet
- MCQ TRANSFORMATIONSsDocument9 pagesMCQ TRANSFORMATIONSsعمرو جمالNo ratings yet
- 2-Dimension Geometric TransformationDocument18 pages2-Dimension Geometric TransformationBraj KishoreNo ratings yet
- Multivariable Differential Calculus: The Dot ProductDocument4 pagesMultivariable Differential Calculus: The Dot ProductadryNo ratings yet
- A Review of The Complex Number System: Principles of Electric Circuits, Conventional Flow, 9 EdDocument14 pagesA Review of The Complex Number System: Principles of Electric Circuits, Conventional Flow, 9 EdVinNo ratings yet
- Chapter3-Two Dimensional TransformationsDocument52 pagesChapter3-Two Dimensional TransformationsPriyadarshini PatilNo ratings yet
- Part 2 - Geometric TransformationDocument123 pagesPart 2 - Geometric Transformationkhalil alhatabNo ratings yet
- Chapter 3Document51 pagesChapter 3Teze TadeNo ratings yet
- Unit 2Document28 pagesUnit 2Rahul SaiNo ratings yet
- Geometric TransformationDocument20 pagesGeometric TransformationDivya KhanolkarNo ratings yet
- 0-CubicSpline-Bezier - Curve-25oct18Document116 pages0-CubicSpline-Bezier - Curve-25oct18vishwajeet patilNo ratings yet
- DC105 Module2 Lesson1 - Graphics and VisualizationDocument14 pagesDC105 Module2 Lesson1 - Graphics and VisualizationsdfNo ratings yet
- Homogeneous CoordinatesDocument14 pagesHomogeneous CoordinatesAjad AliNo ratings yet
- Curves and Surfaces: UNIT-4 By: Sandeep Kumar AP CSE DepartmentDocument44 pagesCurves and Surfaces: UNIT-4 By: Sandeep Kumar AP CSE DepartmentSandeep KumarNo ratings yet
- CAD GM KJHA 2d TransformationDocument91 pagesCAD GM KJHA 2d TransformationAnu SinghNo ratings yet
- Homogenous TransformationDocument5 pagesHomogenous TransformationDomjul KumzhiNo ratings yet
- Arbitrary Plane ReflectionDocument2 pagesArbitrary Plane ReflectionShalu OjhaNo ratings yet
- Cad 4Document9 pagesCad 4deepakNo ratings yet
- MatrixDocument60 pagesMatrixsadhanamca1No ratings yet
- Cgsem 4 PPT 3Document24 pagesCgsem 4 PPT 3Subash RajeshNo ratings yet
- Basic Transformations:: TranslationDocument8 pagesBasic Transformations:: TranslationprincejiNo ratings yet
- Transformations of ObjectsDocument24 pagesTransformations of Objectsfaizy giiNo ratings yet
- CG Chapter 5Document61 pagesCG Chapter 5kiramelaku1No ratings yet
- 2D TransformationsDocument4 pages2D TransformationsAdisesha KandipatiNo ratings yet
- Miscellaneous Transformations and ProjectionsDocument23 pagesMiscellaneous Transformations and ProjectionsAtilioGrondonaNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- MM 453Document122 pagesMM 453syed yousafNo ratings yet
- Lecture - 5, 7 CAD System & HardwareDocument24 pagesLecture - 5, 7 CAD System & Hardwaresyed yousafNo ratings yet
- MM435 CDP-1 Lect3Document39 pagesMM435 CDP-1 Lect3syed yousafNo ratings yet
- MM 463 PDFDocument31 pagesMM 463 PDFsyed yousafNo ratings yet
- 1.6 Measuring Tools: Science )Document31 pages1.6 Measuring Tools: Science )Hana NurinNo ratings yet
- PradaDocument5 pagesPradaJoseblanco2014No ratings yet
- Concept of EthicsDocument1 pageConcept of EthicsUtkarsh Tripathi72No ratings yet
- Homework 4Document3 pagesHomework 4DavidMuñozNo ratings yet
- Sergei Bulgakov: Eastern Orthodoxy Engaging The Modern WorldDocument10 pagesSergei Bulgakov: Eastern Orthodoxy Engaging The Modern Worldmatrik88No ratings yet
- KendoDocument40 pagesKendosema2210100% (1)
- ABB S200 Miniature Circuit BreakersDocument33 pagesABB S200 Miniature Circuit Breakersexge2000No ratings yet
- Hs Geometry PDFDocument26 pagesHs Geometry PDFapi-255155256No ratings yet
- Staff DirectoryDocument12 pagesStaff DirectoryTimNo ratings yet
- Med Sport Pract 2020 Critical CommentaryDocument38 pagesMed Sport Pract 2020 Critical Commentaryleal thiagoNo ratings yet
- 5 Paretoneal DialysidsDocument7 pages5 Paretoneal DialysidsPrasann RoyNo ratings yet
- Assigment 1Document2 pagesAssigment 1Pankhuri Kumari0% (1)
- Certificat AD W0 - EN - CompressedDocument1 pageCertificat AD W0 - EN - Compressedharshileng3992No ratings yet
- 1 Learn Spanish E-BookDocument109 pages1 Learn Spanish E-BookLoredana Matran100% (1)
- Ic Presentation 1Document11 pagesIc Presentation 1api-304006337No ratings yet
- Erin B. Reaction PaperDocument5 pagesErin B. Reaction PaperMay FakatNo ratings yet
- 21LC11.1.3.a.Voltage RegulatorDocument9 pages21LC11.1.3.a.Voltage RegulatorSiranjeevi GnanamNo ratings yet
- Problem On Flash CalculationDocument5 pagesProblem On Flash CalculationDixit SabhaniNo ratings yet
- The Schmidt Hammer in Rock Material Characterization: Engineering Geology September 2005Document15 pagesThe Schmidt Hammer in Rock Material Characterization: Engineering Geology September 2005pankaj rawatNo ratings yet
- IMP/001/010 - Code of Practice For Standard Arrangements For Customer ConnectionsDocument60 pagesIMP/001/010 - Code of Practice For Standard Arrangements For Customer Connectionsradulescuandrei100No ratings yet
- Love Relationship-Vedic AstrologyDocument5 pagesLove Relationship-Vedic AstrologyAstrologer in Dubai Call 0586846501100% (1)
- ReflectionDocument4 pagesReflectionStephanie Manangkil67% (3)
- 597926Document1 page597926Yana Jarang OlNo ratings yet
- Science Final ReviewerDocument25 pagesScience Final ReviewerTantan Fortaleza PingoyNo ratings yet
- Activity WorksheetDocument5 pagesActivity WorksheetMarlon S. BarangganNo ratings yet
- Charts To Convert PPMDocument2 pagesCharts To Convert PPMsyahmi1337No ratings yet
- Heart of The Whau - Part 5 The Rise of The Shopping MallDocument25 pagesHeart of The Whau - Part 5 The Rise of The Shopping MallStorm Gerome100% (1)
- Sorcery PDFDocument164 pagesSorcery PDFepieNo ratings yet
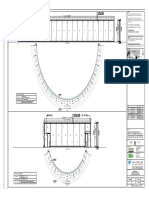
- Main Villa SF Arc Window Schedule 01Document1 pageMain Villa SF Arc Window Schedule 01MiteshSuneriyaNo ratings yet