You might also like
- Equivalent Force SystemsDocument30 pagesEquivalent Force SystemsEhreenNo ratings yet
- Chapter 2 Forces & EquilibriumDocument54 pagesChapter 2 Forces & EquilibriumIsabelNo ratings yet
- Principles of StaticsDocument10 pagesPrinciples of Staticsblue nnnNo ratings yet
- CHAPTER 2 - Forces and EquilibriumDocument53 pagesCHAPTER 2 - Forces and EquilibriumLin YanNo ratings yet
- Es1 2ND NotesDocument10 pagesEs1 2ND NotesTristan MuraoNo ratings yet
- Work BookDocument50 pagesWork BookSimon Rupert FaderaNo ratings yet
- Scalars and Vectors: ScalarDocument22 pagesScalars and Vectors: Scalarsuwilanji kawambaleNo ratings yet
- Principles of StaticsDocument7 pagesPrinciples of StaticsJommarVocalTagalogNo ratings yet
- Statics Course NotesDocument274 pagesStatics Course NotesSubin IdikulaNo ratings yet
- Lecture Statics - Part 1 - Resultant of Force SystemsDocument8 pagesLecture Statics - Part 1 - Resultant of Force Systemstroll warlordsNo ratings yet
- BFC10103 Static and DynamicDocument53 pagesBFC10103 Static and Dynamicmuhammad adnielNo ratings yet
- Lecture 2Document67 pagesLecture 2nnsNo ratings yet
- Turning Effect of ForceDocument14 pagesTurning Effect of ForceAbdur RahmanNo ratings yet
- Equivalent Force Systems: This Module Aims That The Students Will Be Able ToDocument11 pagesEquivalent Force Systems: This Module Aims That The Students Will Be Able ToMONIQUE UNICO100% (1)
- Statics of Particle: - Forces in PlaneDocument36 pagesStatics of Particle: - Forces in PlaneNorsahira Binti MaslazimNo ratings yet
- Force Vectors: Scalars and Vectors 2D and 3D Force SystemsDocument20 pagesForce Vectors: Scalars and Vectors 2D and 3D Force Systemsdanaluca2753No ratings yet
- Stat211 Resultant of Concurrent Force SystemDocument3 pagesStat211 Resultant of Concurrent Force Systemabandiola3819qcNo ratings yet
- Forces and EquilibriumDocument57 pagesForces and EquilibriumUnknown_unknown_unknownNo ratings yet
- Statics Chapter 4Document11 pagesStatics Chapter 4aniceto labianNo ratings yet
- Emechanics M2Document13 pagesEmechanics M2ELISA LUNARNo ratings yet
- Topic 2 Force VectorDocument56 pagesTopic 2 Force VectorhmzhwryajNo ratings yet
- Statics of Rigid Bodies: Engineering MechanicsDocument35 pagesStatics of Rigid Bodies: Engineering MechanicsJoylyn BeranNo ratings yet
- L02 - Vectors IDocument24 pagesL02 - Vectors IZohebCurrimbhoy0% (1)
- Chapter 2pptDocument116 pagesChapter 2pptyohannes lemiNo ratings yet
- 7 Force AnalysisDocument19 pages7 Force AnalysisEn Eskay100% (1)
- Force VectorDocument47 pagesForce Vectoradeliene 25No ratings yet
- Resolution of ForcesDocument10 pagesResolution of ForcesNarayanan SubramanianNo ratings yet
- Application, Its Magnitude, and Its DirectionDocument12 pagesApplication, Its Magnitude, and Its DirectionJohn Laurence Gonzaga AlcantaraNo ratings yet
- Bahan Ajar - Ptm117 Mekanika TeknikDocument141 pagesBahan Ajar - Ptm117 Mekanika Teknikariefz45100% (3)
- Problem Set SRBDocument11 pagesProblem Set SRBGenesis MedelNo ratings yet
- Mathematics For ElectromagnetismDocument20 pagesMathematics For ElectromagnetismPradeep RajasekeranNo ratings yet
- Vectors and Force System (Lec 5-6) ME 122Document34 pagesVectors and Force System (Lec 5-6) ME 122Farhan AliNo ratings yet
- Engineering Mechanics: Statics: ForceDocument16 pagesEngineering Mechanics: Statics: ForceChristogratia Immanuel SimbolonNo ratings yet
- Structural Design I: Structural Mechanics Study of ForcesDocument14 pagesStructural Design I: Structural Mechanics Study of ForcesHimanshu duaNo ratings yet
- Lecture 3 Chapter 2 - Force Systems 2DDocument61 pagesLecture 3 Chapter 2 - Force Systems 2Drobel metikuNo ratings yet
- Chapter 2 Forces and EquilibriumDocument53 pagesChapter 2 Forces and EquilibriumvinoNo ratings yet
- OCW SKAA1213 02 Resultant and Resolution of Forces Part 1Document23 pagesOCW SKAA1213 02 Resultant and Resolution of Forces Part 1ailyn joi rodilNo ratings yet
- F A 89 o and-WPS OfficeDocument13 pagesF A 89 o and-WPS OfficeBrazil TubillaNo ratings yet
- 3.1 FORCE SYSTEMS Forces and ComponentsDocument11 pages3.1 FORCE SYSTEMS Forces and ComponentsNicoljen MangubatNo ratings yet
- Chapter 1. ForcesDocument57 pagesChapter 1. ForcesRandomNo ratings yet
- Components of A Force in XY PlaneDocument12 pagesComponents of A Force in XY PlaneKathleen A. PascualNo ratings yet
- Chapter-II-Resultant-of-a-Force-2.3-2.4-2.5 B273 LecturesDocument4 pagesChapter-II-Resultant-of-a-Force-2.3-2.4-2.5 B273 LecturesMickyleee ChannelNo ratings yet
- L3: Equivalent Systems of Forces Moment of A Force: Statics of Rigid BodiesDocument8 pagesL3: Equivalent Systems of Forces Moment of A Force: Statics of Rigid BodiesJohn Laurence Gonzaga AlcantaraNo ratings yet
- Lecture 1Document8 pagesLecture 1Anas MohamedNo ratings yet
- Lecture 2 PMDocument52 pagesLecture 2 PMASHISH KUMAR SAHOONo ratings yet
- 15ME52 DOM Dec-2018Document40 pages15ME52 DOM Dec-2018prashanthattiNo ratings yet
- (L8) - (JLD 3.0) - NLM - 24th June.Document69 pages(L8) - (JLD 3.0) - NLM - 24th June.Aditya BiswasNo ratings yet
- Lesson-2 (SRB)Document16 pagesLesson-2 (SRB)Christian MagdangalNo ratings yet
- Feynman Lectures Simplified 2B: Magnetism & ElectrodynamicsFrom EverandFeynman Lectures Simplified 2B: Magnetism & ElectrodynamicsNo ratings yet
- Mathematical Analysis 1: theory and solved exercisesFrom EverandMathematical Analysis 1: theory and solved exercisesRating: 5 out of 5 stars5/5 (1)
- Problems in Quantum Mechanics: Third EditionFrom EverandProblems in Quantum Mechanics: Third EditionRating: 3 out of 5 stars3/5 (2)
- De La Salle Lipa College of Information Technology and Engineering Electrical Engineering DepartmentDocument7 pagesDe La Salle Lipa College of Information Technology and Engineering Electrical Engineering DepartmentairaNo ratings yet
- ExpDocument5 pagesExpairaNo ratings yet
- Experiment 3,4 and 5Document10 pagesExperiment 3,4 and 5airaNo ratings yet
- EXPERIMENT 3 4 and 5 - LINGAODocument9 pagesEXPERIMENT 3 4 and 5 - LINGAOairaNo ratings yet
- 16 V5C Experiment4Document22 pages16 V5C Experiment4airaNo ratings yet
- Buoyancy ProblemsDocument20 pagesBuoyancy ProblemsairaNo ratings yet
- Group 3-V3B: 12-Volts Regulated Variable DC Power SupplyDocument27 pagesGroup 3-V3B: 12-Volts Regulated Variable DC Power SupplyairaNo ratings yet
- Experiment 2Document6 pagesExperiment 2aira100% (1)
- 16 V5C Experiment2Document10 pages16 V5C Experiment2airaNo ratings yet
- De La Salle Lipa College of Information Technology and Engineering Electrical Engineering DepartmentDocument7 pagesDe La Salle Lipa College of Information Technology and Engineering Electrical Engineering DepartmentairaNo ratings yet
- Problem Set 22 Integration, Area, Volume, Surface Area, Length of An Arc, CentroidDocument6 pagesProblem Set 22 Integration, Area, Volume, Surface Area, Length of An Arc, CentroidairaNo ratings yet
- Week 5Document10 pagesWeek 5airaNo ratings yet
- WEEK 6/ Alternator Test Solve ProblemsDocument15 pagesWEEK 6/ Alternator Test Solve ProblemsairaNo ratings yet
- Week 2 - 3Document20 pagesWeek 2 - 3airaNo ratings yet
- CKTSASSDocument24 pagesCKTSASSairaNo ratings yet
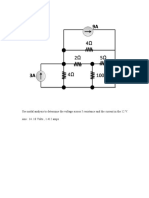
- Use Nodal Analysis To Determine The Voltage Across 5 Resistance and The Current in The 12 V. Ans: 14. 18 Volts, 1.412 AmpsDocument20 pagesUse Nodal Analysis To Determine The Voltage Across 5 Resistance and The Current in The 12 V. Ans: 14. 18 Volts, 1.412 AmpsairaNo ratings yet
- Bero SonarDocument42 pagesBero Sonarmarcio_limaNo ratings yet
- Padhle 11th - States of MatterDocument29 pagesPadhle 11th - States of MatterLAVISH JAINNo ratings yet
- PA66 GF25 Polyamide Nylon Strips Extrusion Making Machine Plastic Recycling MachineDocument13 pagesPA66 GF25 Polyamide Nylon Strips Extrusion Making Machine Plastic Recycling MachineradhoinezerellyNo ratings yet
- (As Per IS 10262-2019) : 1.stipulations For ProportioningDocument10 pages(As Per IS 10262-2019) : 1.stipulations For Proportioningmahesh naikNo ratings yet
- Mapped GRADE 7Document63 pagesMapped GRADE 7glenn paul catotoNo ratings yet
- Generator Set Data Sheet HFW 75 t5 Soundproof EnglishDocument7 pagesGenerator Set Data Sheet HFW 75 t5 Soundproof EnglishMyatmin htetwaiNo ratings yet
- Ok - Moqueta Interface PDFDocument185 pagesOk - Moqueta Interface PDFJavier Molina DelgadoNo ratings yet
- 4th Year Project - 588512328Document47 pages4th Year Project - 588512328ናዝራዊ አማኑኤል ጌታቸውNo ratings yet
- Anexo Ii Gea BischoffDocument16 pagesAnexo Ii Gea BischoffFelipe Andres Jaque DelgadoNo ratings yet
- Ncert Booster Test SeriesDocument17 pagesNcert Booster Test SerieskailashNo ratings yet
- Ituplus Ituplus: B B G 4200 G 4200Document4 pagesItuplus Ituplus: B B G 4200 G 4200Engr KamalNo ratings yet
- Ee-304 Analog Electronics 75 QuestionsDocument5 pagesEe-304 Analog Electronics 75 QuestionsnaactitexcellenceNo ratings yet
- Riemannian Geometry Course NotesDocument102 pagesRiemannian Geometry Course NotesLars SwijsenNo ratings yet
- CH 03 More QuestionsDocument16 pagesCH 03 More Questionswoboc79249No ratings yet
- Matecconf Ses2018 06006Document6 pagesMatecconf Ses2018 06006Rendell Honey LeybaNo ratings yet
- Oversized Circular Corrugated Waveguides Operated at 42 GHZ For Ecrh ApplicationDocument10 pagesOversized Circular Corrugated Waveguides Operated at 42 GHZ For Ecrh Applicationjit_72No ratings yet
- Navier-Stokes Equation: March 2004Document4 pagesNavier-Stokes Equation: March 2004FREDY PALINGGINo ratings yet
- Super Multi Catalogue PDFDocument36 pagesSuper Multi Catalogue PDFWai Lwin KoNo ratings yet
- Egg Drop ChallengeDocument3 pagesEgg Drop ChallengeJamila Claire DelarminoNo ratings yet
- QAT1001912 SolDocument3 pagesQAT1001912 SolNaveenNo ratings yet
- L6 Serie 2 21 Startup ProgramsDocument72 pagesL6 Serie 2 21 Startup ProgramsNGUYEN HUU DAONo ratings yet
- 3-1 PDC Terminology and Drilling MechDocument26 pages3-1 PDC Terminology and Drilling MechMahmoud NassarNo ratings yet
- Nexans - Corflex-KDocument24 pagesNexans - Corflex-KReza AbadiNo ratings yet
- NIST Standard Reference Materials® 2023 CatalogDocument128 pagesNIST Standard Reference Materials® 2023 CatalogAbdul HaseebNo ratings yet
- 1 Formation EvaluationDocument26 pages1 Formation EvaluationMostafa IbrahimNo ratings yet
- Chap 2Document72 pagesChap 2miguel0angel0ramos-1100% (6)
- JOYSTICK MS-A2, 2-Axis: No.: 1.004.9000 No.: 1.004.9001Document1 pageJOYSTICK MS-A2, 2-Axis: No.: 1.004.9000 No.: 1.004.9001Сергей ЦарицынNo ratings yet
- Chapter 9Document24 pagesChapter 9Julius MacaballugNo ratings yet
- Sample Report - Aggregate 20mmDocument2 pagesSample Report - Aggregate 20mmPinnacle InfraNo ratings yet
- Technical Data SIMOSEC WorldDocument51 pagesTechnical Data SIMOSEC Worldgerardo.aquinoNo ratings yet