You might also like
- Power of Love-Huey Lewis CRDDocument2 pagesPower of Love-Huey Lewis CRDmoon_19690% (1)
- Chapter15 Elements of RoboticsDocument40 pagesChapter15 Elements of RoboticsSri RamNo ratings yet
- History of Madre de DiosDocument3 pagesHistory of Madre de DiosMisterJanNo ratings yet
- Echofish JRC Jfc-180bbDocument4 pagesEchofish JRC Jfc-180bbJERINsmileNo ratings yet
- Seminar On: Presented ByDocument22 pagesSeminar On: Presented Bytagore05No ratings yet
- Introduction To Robotics Ch1Document28 pagesIntroduction To Robotics Ch1Dhaba AlemuNo ratings yet
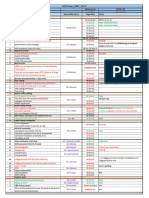
- Hach - MWP (Plan Vs Actual) Status - 22 Oct-1Document1 pageHach - MWP (Plan Vs Actual) Status - 22 Oct-1ankit singhNo ratings yet
- An Introduction to the Wonderful World of Robotics - Science Book for Kids | Children's Science Education BooksFrom EverandAn Introduction to the Wonderful World of Robotics - Science Book for Kids | Children's Science Education BooksNo ratings yet
- Image Steganography ScopeDocument13 pagesImage Steganography ScopeMUHAMMAD FARAZ HAIDERNo ratings yet
- Human Emotions in Robots Human Emotions in Robots: Presentation by Yash Presentation by YashDocument26 pagesHuman Emotions in Robots Human Emotions in Robots: Presentation by Yash Presentation by YashYash Sharad MandhareNo ratings yet
- Business Law Syllabus (BLT)Document4 pagesBusiness Law Syllabus (BLT)Glene NallaNo ratings yet
- Humanoid Robots: Vishwakarma Institute of Technology, Pune-37 Department of Electronics and Telecommunication EngineeringDocument31 pagesHumanoid Robots: Vishwakarma Institute of Technology, Pune-37 Department of Electronics and Telecommunication EngineeringSoham Sajekar100% (1)
- Embedded System in Automobile VehiclesDocument17 pagesEmbedded System in Automobile Vehiclessam clastineNo ratings yet
- Automation and Robotics '20Document56 pagesAutomation and Robotics '20Raphael IbrahNo ratings yet
- Cisco Start CatalogDocument4 pagesCisco Start CatalogqntttNo ratings yet
- Modern Life: Unit ContentsDocument13 pagesModern Life: Unit ContentsRodrigo Bastos FerreiraNo ratings yet
- STS Lesson 7.2 RoboticsDocument40 pagesSTS Lesson 7.2 RoboticsJoyce Delas AlasNo ratings yet
- Robotics c1Document24 pagesRobotics c1Md. Faysal Alam RiyadNo ratings yet
- Submitted By:-Harshal Awale ROLL NO: - 11031M02017Document25 pagesSubmitted By:-Harshal Awale ROLL NO: - 11031M02017Sneha SandyNo ratings yet
- Ict Presentation Humanoid RobotsDocument26 pagesIct Presentation Humanoid RobotsmoatterzahraNo ratings yet
- Basics of RoboticsDocument15 pagesBasics of RoboticsKeziah LafortezaNo ratings yet
- EN - MRI Curs1 PDFDocument70 pagesEN - MRI Curs1 PDFChirila AndreiNo ratings yet
- Chapter 1Document75 pagesChapter 1Halu FikaduNo ratings yet
- Humanoid Robots SeminarDocument28 pagesHumanoid Robots SeminarMan HunNo ratings yet
- Introduction To Artificial Intelligence Week 12Document16 pagesIntroduction To Artificial Intelligence Week 12Irene PayadNo ratings yet
- Humanoid RobotsDocument25 pagesHumanoid Robotsjadalarohit21No ratings yet
- Humanoid Robots: by Nidhi SinghDocument23 pagesHumanoid Robots: by Nidhi SinghNidhi SinghNo ratings yet
- Robotics M1 L02Document28 pagesRobotics M1 L02Abby StudiosNo ratings yet
- DEC 50122 Embedded RoboticDocument26 pagesDEC 50122 Embedded RoboticaimanNo ratings yet
- Robotics: Where Meets The Real WorldDocument14 pagesRobotics: Where Meets The Real Worldrajeshkumar1560No ratings yet
- Computer Project RoboticsDocument7 pagesComputer Project RoboticsnuzhatNo ratings yet
- To Invent You Need A Good Imagination and A Pile of JunkDocument16 pagesTo Invent You Need A Good Imagination and A Pile of Junkpchhina100% (16)
- Mekatronika XiiiDocument21 pagesMekatronika XiiiAgus IkiNo ratings yet
- Assignment 3: Robotics Recent Trend and TechnologyDocument15 pagesAssignment 3: Robotics Recent Trend and TechnologyRevan GaikwadNo ratings yet
- ELE8328: Introduction To Robotics: Dr. Mustapha Muhammad Department of Mechatronics Engineering Bayero University, KanoDocument41 pagesELE8328: Introduction To Robotics: Dr. Mustapha Muhammad Department of Mechatronics Engineering Bayero University, KanoumarsaboNo ratings yet
- Robotics: BY M.Ram KumarDocument14 pagesRobotics: BY M.Ram KumarRàm Dè RàscàlNo ratings yet
- I.What Is A Robot?Document12 pagesI.What Is A Robot?Nykie MalagayoNo ratings yet
- Department of Computer Science and Application Kurukshetra University KurukshetraDocument11 pagesDepartment of Computer Science and Application Kurukshetra University KurukshetraRaj VermaNo ratings yet
- Fundamentals of Robotics: Ingeniería en ComputaciónDocument37 pagesFundamentals of Robotics: Ingeniería en Computaciónasnake dessieNo ratings yet
- LectureOne Introduction To Robotics DrWasanDocument31 pagesLectureOne Introduction To Robotics DrWasanwasan.engNo ratings yet
- Robotics SeminarDocument17 pagesRobotics SeminarTejasvi PalNo ratings yet
- Modelling of Human Leg and Robotic ArmDocument10 pagesModelling of Human Leg and Robotic ArmTarun SharmaNo ratings yet
- RobotsDocument12 pagesRobotsArim ArimNo ratings yet
- 1 s2.0 S1474667016456557 MainDocument6 pages1 s2.0 S1474667016456557 MainHrithudev VsNo ratings yet
- EnglishprojectDocument3 pagesEnglishprojectTalha AbbasiNo ratings yet
- Robots: Made by Ambasht AssociatesDocument11 pagesRobots: Made by Ambasht AssociateskumarpranavindNo ratings yet
- Robotics SeminarDocument14 pagesRobotics Seminardmharithra2212100% (1)
- Introduction PDFDocument17 pagesIntroduction PDFDr.A.Maniram KumarNo ratings yet
- Robots ApplicationsDocument29 pagesRobots Applicationsstalinrajesh143No ratings yet
- ROBOTICS Paper PresentationDocument6 pagesROBOTICS Paper PresentationKarnan SuganyaNo ratings yet
- Lecture 1 Intro To Robotics - 221011 - 103012Document37 pagesLecture 1 Intro To Robotics - 221011 - 103012Domjul KumzhiNo ratings yet
- Unit 4Document79 pagesUnit 4sachin11200111No ratings yet
- Robotics 11Document35 pagesRobotics 11omarelkabbany005No ratings yet
- 1 - 1 Introduction To Robotics (Autosaved)Document22 pages1 - 1 Introduction To Robotics (Autosaved)Riya jainNo ratings yet
- The World of Robots: Name: Wahyu Widodo NIM: 2010-52-014Document16 pagesThe World of Robots: Name: Wahyu Widodo NIM: 2010-52-014umaryaniNo ratings yet
- 9-John J. Craig, "Introduction To Robotics Mechanics and Control", Third Edition, 2005Document41 pages9-John J. Craig, "Introduction To Robotics Mechanics and Control", Third Edition, 2005tasenNo ratings yet
- RoboticsDocument42 pagesRoboticsMarini Pramod KumarNo ratings yet
- Android Robotics Hard CpyDocument4 pagesAndroid Robotics Hard CpyKumar NagarajNo ratings yet
- Roboticsfinal 170609142845Document20 pagesRoboticsfinal 170609142845DeepakNo ratings yet
- RoboticsDocument176 pagesRoboticsImoleoluwa OlayemiNo ratings yet
- CH - 1 - Introduction To RoboticsDocument46 pagesCH - 1 - Introduction To RoboticsChristy PollyNo ratings yet
- A Robot Is A Virtual or Mechanical Artificial Agents. in Practice, It Is UsuallyDocument8 pagesA Robot Is A Virtual or Mechanical Artificial Agents. in Practice, It Is UsuallyDivisha KapurNo ratings yet
- Basics of RoboticsDocument15 pagesBasics of RoboticsRenu KatiyarNo ratings yet
- Robot A WonderfulDocument14 pagesRobot A WonderfulNaina KothariNo ratings yet
- Application and Types of RobotsDocument2 pagesApplication and Types of RobotsAnne MagcalasNo ratings yet
- Wa0007.Document17 pagesWa0007.Aneesh krishnanNo ratings yet
- Baocao RobotDocument18 pagesBaocao RobotMinh PhongNo ratings yet
- Using Density To Determine The Sugar Content in Commercial BeveragesDocument12 pagesUsing Density To Determine The Sugar Content in Commercial BeveragesMax DornelesNo ratings yet
- Elite MindsDocument1 pageElite MindsShivaNo ratings yet
- Intelligent Platform Management Interface Firmware, Upgrade: Operational InstructionDocument23 pagesIntelligent Platform Management Interface Firmware, Upgrade: Operational InstructionLayth WaellNo ratings yet
- From St. Francis To Dante-Translations From The Chronicle of The Franciscan Salimbene, 1221-1288Document489 pagesFrom St. Francis To Dante-Translations From The Chronicle of The Franciscan Salimbene, 1221-1288Jake SalNo ratings yet
- Genmath Q2 Week4Document36 pagesGenmath Q2 Week4ShennieNo ratings yet
- Biodata Arnel For Yahweh GloryDocument2 pagesBiodata Arnel For Yahweh GloryClergyArnel A CruzNo ratings yet
- Gehman Mennonite Church: Let's Walk With Jesus Personally, Locally, and GloballyDocument1 pageGehman Mennonite Church: Let's Walk With Jesus Personally, Locally, and GloballyGehman Mennonite ChurchNo ratings yet
- Once Upon A Time A Hawk Feels in Love With A HenDocument2 pagesOnce Upon A Time A Hawk Feels in Love With A HenJeffri Aritonang100% (1)
- Lecture-3: Market Equilibrium and Applications: Abdul Quadir XlriDocument37 pagesLecture-3: Market Equilibrium and Applications: Abdul Quadir Xlrianu balakrishnanNo ratings yet
- Loan Modifications - Workout Plans and ModificationDocument43 pagesLoan Modifications - Workout Plans and ModificationSudershan ThaibaNo ratings yet
- 2011 Issue 3 IPPTA Articel 01Document5 pages2011 Issue 3 IPPTA Articel 01rahulNo ratings yet
- Yangon Technological University Department of Civil Engineering Construction ManagementDocument18 pagesYangon Technological University Department of Civil Engineering Construction Managementthan zawNo ratings yet
- E Id - Like - To - BeDocument9 pagesE Id - Like - To - BeNatalia IlhanNo ratings yet
- Vision N MissionDocument8 pagesVision N MissionIshpreet SinghNo ratings yet
- PW 1989 12Document76 pagesPW 1989 12Milton NastNo ratings yet
- 131101-2 Gtu 3rd Sem PaperDocument4 pages131101-2 Gtu 3rd Sem PaperShailesh SankdasariyaNo ratings yet
- Communityhealth 141122094330 Conversion Gate02Document22 pagesCommunityhealth 141122094330 Conversion Gate02Titser JoNo ratings yet
- Ebf Rehearsal RubricDocument1 pageEbf Rehearsal Rubricapi-518770643No ratings yet
- Preparation and Practice Answer KeyDocument16 pagesPreparation and Practice Answer KeyHiệp Nguyễn TuấnNo ratings yet
- Quantitative Reasearch KINDS OF RESEARCHDocument1 pageQuantitative Reasearch KINDS OF RESEARCHEivie SonioNo ratings yet
- Moskvin Eng FibromialgiaDocument218 pagesMoskvin Eng FibromialgiaWebster LimNo ratings yet