You might also like
- Traversing and Traverse ComputationDocument67 pagesTraversing and Traverse ComputationBrian Rey L. Abing100% (1)
- AP1 Simple Harmonic Motion Presenter W AnswersDocument33 pagesAP1 Simple Harmonic Motion Presenter W AnswersDamion Mcdowell100% (1)
- Integrals of Scalar Functions: ME 201 Advanced Calculus Summary of Chapter 15 - Vector CalculusDocument2 pagesIntegrals of Scalar Functions: ME 201 Advanced Calculus Summary of Chapter 15 - Vector CalculusVijai Christopher SookrahNo ratings yet
- Different DH ConventionsDocument20 pagesDifferent DH ConventionsomarNo ratings yet
- p3 Complex Numbers NotesDocument12 pagesp3 Complex Numbers NotesZira GreyNo ratings yet
- Feynman Lectures Simplified 2B: Magnetism & ElectrodynamicsFrom EverandFeynman Lectures Simplified 2B: Magnetism & ElectrodynamicsNo ratings yet
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresFrom EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresRating: 4 out of 5 stars4/5 (1)
- Formula Sheet For Physics HallidayDocument6 pagesFormula Sheet For Physics HallidayTayyab ChaudharyNo ratings yet
- Physics Chapter 8 AnswersDocument44 pagesPhysics Chapter 8 AnswersAbovethesystem95% (22)
- NSS Physics at Work Book 2 Revision Exercise 7 AnswerDocument12 pagesNSS Physics at Work Book 2 Revision Exercise 7 AnswerArtificial Idiot100% (1)
- (American Literature Readings in The 21st Century) Gerald Alva Miller Jr. (Auth.) - Exploring The Limits of The Human Through Science Fiction (2012, Palgrave Macmillan US)Document244 pages(American Literature Readings in The 21st Century) Gerald Alva Miller Jr. (Auth.) - Exploring The Limits of The Human Through Science Fiction (2012, Palgrave Macmillan US)culhaozaoNo ratings yet
- Chapter - 12 - 0 MathematicsDocument55 pagesChapter - 12 - 0 MathematicsJoyce HerreraNo ratings yet
- PHYS 101 - General Physics-I, Final ExamDocument8 pagesPHYS 101 - General Physics-I, Final ExamhuuuzenNo ratings yet
- Vector Mechanics For Engineers Dynamics 11th Edition 3chDocument28 pagesVector Mechanics For Engineers Dynamics 11th Edition 3ch양한마리No ratings yet
- Dynamics of MotionDocument8 pagesDynamics of Motionjulianne sanchezNo ratings yet
- Kinetics, Impluse and MomentumDocument36 pagesKinetics, Impluse and MomentumKyle Corrales MesiasNo ratings yet
- Tut 7 Slides HiroSATODocument7 pagesTut 7 Slides HiroSATOImperial ReckerNo ratings yet
- Practice Exam 2 Solutions: Problem 1Document6 pagesPractice Exam 2 Solutions: Problem 1Henni DalimuntheNo ratings yet
- Kinetics of A Particle: Force and Acceleration (I) : by Dr. Toh Hoong ThiamDocument30 pagesKinetics of A Particle: Force and Acceleration (I) : by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- mt1 (Solutions)Document6 pagesmt1 (Solutions)dilaytornaciiiNo ratings yet
- Lecture-Kinetics of Particles Newton S 2nd Law3-1Document28 pagesLecture-Kinetics of Particles Newton S 2nd Law3-1Alyssa NavarroNo ratings yet
- Physics, Chemistry and MathematicsDocument10 pagesPhysics, Chemistry and Mathematicsarchit jain123No ratings yet
- In-Class Problems 11-13: Uniform Circular Motion SolutionsDocument8 pagesIn-Class Problems 11-13: Uniform Circular Motion SolutionsSarthakNo ratings yet
- Answer Tutorial 4Document3 pagesAnswer Tutorial 4Anas KamalNo ratings yet
- 02 - Single Particle MotionDocument12 pages02 - Single Particle MotionSamNo ratings yet
- Physics 111 Homework Solution #7Document14 pagesPhysics 111 Homework Solution #7Carlos OrozcoNo ratings yet
- Brief Review of Newtonian MechanicsDocument20 pagesBrief Review of Newtonian Mechanicszijun yuNo ratings yet
- 4 - Force AccelerationDocument29 pages4 - Force AccelerationLiSinVivianNo ratings yet
- EUREKADocument42 pagesEUREKADante'dcCastilloNo ratings yet
- Manipulator Dynamics: Amirkabir University of Technology Computer Engineering & Information Technology DepartmentDocument44 pagesManipulator Dynamics: Amirkabir University of Technology Computer Engineering & Information Technology DepartmentWajdi SadiqNo ratings yet
- "Gravity Beyond Einstein"-Series: Gravitomagnetism - Successes in Explaining The CosmosDocument41 pages"Gravity Beyond Einstein"-Series: Gravitomagnetism - Successes in Explaining The Cosmossipora1No ratings yet
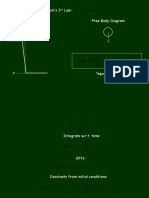
- Newton's 2 Law: Free Body Diagram: Xo YoDocument7 pagesNewton's 2 Law: Free Body Diagram: Xo Yowahied11No ratings yet
- BTVLTADocument6 pagesBTVLTAPhương Thảo HồNo ratings yet
- Topic8 GravitationDocument21 pagesTopic8 GravitationPatrick SibandaNo ratings yet
- Notes05 - Applications of Newtion's LawsDocument44 pagesNotes05 - Applications of Newtion's LawssamNo ratings yet
- Newton'S Laws of MotionDocument21 pagesNewton'S Laws of MotionRagheb IbrahimNo ratings yet
- 11 Din Mein Gyarvi - LOMDocument85 pages11 Din Mein Gyarvi - LOMPankaj MeenNo ratings yet
- Lecture10 P1Document18 pagesLecture10 P1Bảo NgânNo ratings yet
- Forces and Motion 3Document6 pagesForces and Motion 3krichenkyandex.ruNo ratings yet
- Exercise 4Document2 pagesExercise 4lolNo ratings yet
- Assignment N°1 and 2Document4 pagesAssignment N°1 and 2josbenachenhouNo ratings yet
- WORK POWER ENERGY-03-Subjective SolvedDocument11 pagesWORK POWER ENERGY-03-Subjective SolvedRaju SinghNo ratings yet
- 4 Newton's Law and ApplicationsDocument23 pages4 Newton's Law and ApplicationsMak YabuNo ratings yet
- Physics Formula (AutoRecovered)Document7 pagesPhysics Formula (AutoRecovered)John Paull CuaNo ratings yet
- Experiment 1 (Equilibrium of Turning Forces)Document5 pagesExperiment 1 (Equilibrium of Turning Forces)shark eye100% (1)
- Kinetics of Particles - 2 - ClassDocument51 pagesKinetics of Particles - 2 - ClassLebogang TlhagwaneNo ratings yet
- Rotational Spectroscopy: The Rotation of Molecules: Z (I) Symmetric: I I I 0Document11 pagesRotational Spectroscopy: The Rotation of Molecules: Z (I) Symmetric: I I I 0David PattyNo ratings yet
- Some Useful Formulae: A A A A A A + + + +Document3 pagesSome Useful Formulae: A A A A A A + + + +leichihouNo ratings yet
- Class NotesDocument75 pagesClass NotesM. Zalán BremerNo ratings yet
- Chapter 8 CorrectedDocument7 pagesChapter 8 Correctederactus883023No ratings yet
- Ceoff Friction LabDocument3 pagesCeoff Friction LabAman YadavNo ratings yet
- Chapter 6: Circular Motion: Year 5 H2 Physics 2020 Remedial WorksheetDocument3 pagesChapter 6: Circular Motion: Year 5 H2 Physics 2020 Remedial WorksheetMe4d SHiV23No ratings yet
- Gravitational Fields and Gravitational WDocument17 pagesGravitational Fields and Gravitational WSiddharth ShekherNo ratings yet
- AP Physics1 Student Workbook AppendixDocument11 pagesAP Physics1 Student Workbook AppendixcarlosNo ratings yet
- Exercise # 01 CompleteDocument26 pagesExercise # 01 CompleteRehan QureshiNo ratings yet
- Exercise # 01aaDocument5 pagesExercise # 01aaRehan QureshiNo ratings yet
- 5.work Energy and PowerExercise STEMDocument46 pages5.work Energy and PowerExercise STEMAssem HefnyNo ratings yet
- Potential Energy and Energy ConservationDocument32 pagesPotential Energy and Energy Conservationelchappoo kalboNo ratings yet
- 8 02ch29weDocument5 pages8 02ch29weSantiago Manrique MejiaNo ratings yet
- Kinetics of Particles EOM - 2 - Normal TangentialDocument30 pagesKinetics of Particles EOM - 2 - Normal TangentialmoatlhodiNo ratings yet
- Lecture 4 Particles Newton 2nd LawDocument5 pagesLecture 4 Particles Newton 2nd Lawchan haoNo ratings yet
- AP Physics C Mechanics: A. KinematicsDocument34 pagesAP Physics C Mechanics: A. KinematicsBob SmithNo ratings yet
- Chapter 12 - Kinetics of Particles - Part 1 and 2Document30 pagesChapter 12 - Kinetics of Particles - Part 1 and 2Ahmed AliNo ratings yet
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- Lecturx NotezDocument4 pagesLecturx NotezGertaNo ratings yet
- CH 7 Stress - Transformations1Document28 pagesCH 7 Stress - Transformations1GertaNo ratings yet
- Principles Learn The MethodDocument43 pagesPrinciples Learn The MethodGertaNo ratings yet
- 13-7 Central Force Motion P. 155Document35 pages13-7 Central Force Motion P. 155GertaNo ratings yet
- Rigid Body DynamicsDocument45 pagesRigid Body DynamicsGertaNo ratings yet
- V M R H: Angular MomentumDocument75 pagesV M R H: Angular MomentumGertaNo ratings yet
- Problems: 7.1 Through 7.4Document4 pagesProblems: 7.1 Through 7.4GertaNo ratings yet
- Introduction To The Topology of Continuous Dynamical Systems Andries Smith 1. Continuous General Dynamical SystemsDocument13 pagesIntroduction To The Topology of Continuous Dynamical Systems Andries Smith 1. Continuous General Dynamical SystemsEpic WinNo ratings yet
- Glosarry of Questions Cume 212Document11 pagesGlosarry of Questions Cume 212Phenias ManyashaNo ratings yet
- Rectilinear KinematicsDocument8 pagesRectilinear KinematicsMohd Azhari Mohd RodziNo ratings yet
- AutoCAD 3D NotesDocument16 pagesAutoCAD 3D Notesryanavincent0% (1)
- Experiments About Time and SpaceDocument2 pagesExperiments About Time and SpaceloparedesNo ratings yet
- Ch.2 Sine and Cosine Rule & Ch.6 Radian MeasureDocument33 pagesCh.2 Sine and Cosine Rule & Ch.6 Radian MeasurengmaherNo ratings yet
- F6MHL Tutorial On Exp - Log - Rational FnsDocument6 pagesF6MHL Tutorial On Exp - Log - Rational FnsMavesh DamodaranNo ratings yet
- Cse169 04Document57 pagesCse169 04Ibrahim Nazir100% (1)
- Mechanics - MathalinoDocument11 pagesMechanics - MathalinoJizelle De Leon JumaquioNo ratings yet
- PythagorasDocument16 pagesPythagorasGiridharanNo ratings yet
- ME401T CAD Circle Algorithm - 4Document22 pagesME401T CAD Circle Algorithm - 4AnuragShrivastavNo ratings yet
- Drawing Isometric Piping PDFDocument6 pagesDrawing Isometric Piping PDFgamin0% (1)
- Reading The Visual by Mark ThorsbyDocument10 pagesReading The Visual by Mark Thorsbythorm197No ratings yet
- Analytic GeometryDocument10 pagesAnalytic GeometryOrestes MendozaNo ratings yet
- Michael D. Resnik Mathematics As A Science of Patterns: Ontology and ReferenceDocument23 pagesMichael D. Resnik Mathematics As A Science of Patterns: Ontology and ReferenceHelder OliveiraNo ratings yet
- Motion and Time Physics NotesDocument23 pagesMotion and Time Physics NotesmitaliNo ratings yet
- Homework 3 - STEREOCHEMISTRY AT TETRAHEDRAL CENTERSDocument3 pagesHomework 3 - STEREOCHEMISTRY AT TETRAHEDRAL CENTERSThảo UyênNo ratings yet
- Cambridge Igcse Mathematics Revision Guide Cambridge Education Cambridge University Press SamplesDocument12 pagesCambridge Igcse Mathematics Revision Guide Cambridge Education Cambridge University Press SamplesOluwafemi SonubiNo ratings yet
- Pre-K Scope and Sequence PDFDocument9 pagesPre-K Scope and Sequence PDFXiaoNo ratings yet
- Unit 6 TRANSFORMATIONS FINAL PLANDocument27 pagesUnit 6 TRANSFORMATIONS FINAL PLANerdawati nurdinNo ratings yet
- SPM Mid Year 2008 SBP Add Maths Paper 2 QuestionDocument20 pagesSPM Mid Year 2008 SBP Add Maths Paper 2 QuestionChinWynn.com100% (16)
- Physics Dp014 Tutorial 7: II III IIII III IIDocument5 pagesPhysics Dp014 Tutorial 7: II III IIII III IIaliffNo ratings yet
- Motion in A Plane: Chapter FourDocument10 pagesMotion in A Plane: Chapter FourAbhik SarkarNo ratings yet
- Trigonometry 2Document13 pagesTrigonometry 2Bhargav.ch100% (2)
- Mockvita 2018 TcsDocument21 pagesMockvita 2018 TcsAmit RawatNo ratings yet