You might also like
- Lecture 2Document18 pagesLecture 2Nimsiri AbhayasingheNo ratings yet
- Establish Indices For FFT Operations: Shortlin - MCD 1 1/23/2011 3:56 PMDocument8 pagesEstablish Indices For FFT Operations: Shortlin - MCD 1 1/23/2011 3:56 PMSharifNo ratings yet
- Chapter 4.1 Response Ist Order SystemsDocument35 pagesChapter 4.1 Response Ist Order SystemsShah AdnanNo ratings yet
- Laplace HadyDocument52 pagesLaplace HadyT ANo ratings yet
- Appndx D Mae175Document26 pagesAppndx D Mae175JAyNo ratings yet
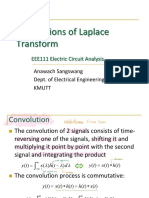
- Introduction To Laplace TransformsDocument47 pagesIntroduction To Laplace TransformsTalha MazharNo ratings yet
- CH - 9 - Frequency Response - 2022Document145 pagesCH - 9 - Frequency Response - 2022鄭又嘉No ratings yet
- IE474 Summer2022 Nise Ch2 PartA PDFDocument33 pagesIE474 Summer2022 Nise Ch2 PartA PDFAmon SimatwoNo ratings yet
- Laplace HadyDocument50 pagesLaplace HadyIhwan FauziNo ratings yet
- L4: Equalisation Bandpass Signals & Systems: (Carlson and Crilly Pp. 110, Sec 4.1 Proakis & Salehi Sec. 2.5)Document15 pagesL4: Equalisation Bandpass Signals & Systems: (Carlson and Crilly Pp. 110, Sec 4.1 Proakis & Salehi Sec. 2.5)Hunter VerneNo ratings yet
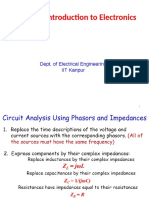
- Electrical Sciences EEE F111Document39 pagesElectrical Sciences EEE F111Kriti TambareNo ratings yet
- Lecture 2 - 3 - First Order ResponsesDocument31 pagesLecture 2 - 3 - First Order ResponsesLiyana HalimNo ratings yet
- L06 - Laplace TransformDocument18 pagesL06 - Laplace TransformAndrea RiccobeneNo ratings yet
- Process Control 7Document45 pagesProcess Control 7ali AbbasNo ratings yet
- Laplace TransformsDocument81 pagesLaplace TransformsChristopher OrtegaNo ratings yet
- SlopedemodDocument9 pagesSlopedemodKelvin MusyokiNo ratings yet
- Laplace Transforms1Document81 pagesLaplace Transforms1MoslemaWaftakherNo ratings yet
- FALLSEM2017-18 - CHE3002 - ETH - SMV102 - VL2017181002129 - Reference Material I - Lecture-1 (Laplace Transform)Document16 pagesFALLSEM2017-18 - CHE3002 - ETH - SMV102 - VL2017181002129 - Reference Material I - Lecture-1 (Laplace Transform)SATHIYANARAYANAN D 15BCM0007No ratings yet
- Model Matematis Sistem Fisik (Materi 2)Document47 pagesModel Matematis Sistem Fisik (Materi 2)Refly DariseNo ratings yet
- Laplace Transforms1Document81 pagesLaplace Transforms1arunkumar SNo ratings yet
- Control Systems: Review of Laplace TransformDocument14 pagesControl Systems: Review of Laplace Transformpiyush soniNo ratings yet
- Chapter 3: Dynamic ResponseDocument78 pagesChapter 3: Dynamic ResponseAhmedSalahNo ratings yet
- Laplace Transform Analysis: Circuit Applications ApplicationsDocument26 pagesLaplace Transform Analysis: Circuit Applications ApplicationsDharamNo ratings yet
- Analog Signals and SystemsDocument39 pagesAnalog Signals and SystemsTrần Hoàng QuânNo ratings yet
- PLL-Prob&Sols (9 5 03) PDFDocument46 pagesPLL-Prob&Sols (9 5 03) PDFJavier Postigo CamposNo ratings yet
- Ee602 LaplaceDocument76 pagesEe602 LaplaceRadhi MusaNo ratings yet
- Laplace Transforms: LinearDocument11 pagesLaplace Transforms: Linear李承家No ratings yet
- Laplace Transform: Dr. Ajay Singh RaghuvanshiDocument66 pagesLaplace Transform: Dr. Ajay Singh RaghuvanshiBhaskarNo ratings yet
- Bab 2 Transformasi Laplace: Mathematician and Astronomer Pierre-Simon LaplaceDocument31 pagesBab 2 Transformasi Laplace: Mathematician and Astronomer Pierre-Simon LaplaceRizqi Cahyo M PutraNo ratings yet
- Laplace TransformDocument17 pagesLaplace TransformMr AliNo ratings yet
- Introduction To Laplace TransformsDocument32 pagesIntroduction To Laplace TransformsAd Man GeTigNo ratings yet
- Automatic ControlDocument16 pagesAutomatic ControlSayed NagyNo ratings yet
- Mathematical Models of Control SystemsDocument37 pagesMathematical Models of Control SystemsmorilloatilioNo ratings yet
- Chapter 5 EditDocument65 pagesChapter 5 EditR Loghanyah M.RameshNo ratings yet
- PLL Technique 2Document25 pagesPLL Technique 2Preeti MishraNo ratings yet
- Filip FlopsDocument4 pagesFilip FlopsMohammed JeelanNo ratings yet
- Automatics and Automatic ControlDocument33 pagesAutomatics and Automatic ControlaliNo ratings yet
- Sinusoids, Phasors, and Steady-State AnalysisDocument53 pagesSinusoids, Phasors, and Steady-State AnalysisryanNo ratings yet
- Blake Problem ComputationDocument42 pagesBlake Problem ComputationAnonymous pS4LT2GJUSNo ratings yet
- MEE315-Process Instrumentation & Control: Dr. Dipesh S. PatleDocument18 pagesMEE315-Process Instrumentation & Control: Dr. Dipesh S. Patle;(No ratings yet
- Esc201: Introducton To Electronics: Dept. of Electrical Engineering Iit KanpurDocument36 pagesEsc201: Introducton To Electronics: Dept. of Electrical Engineering Iit KanpurAbhishek AryaNo ratings yet
- Biomedical IntroduccionDocument30 pagesBiomedical IntroduccionIsmael MontillaNo ratings yet
- L12: Distortion and Interference in FM: D) (2 2 Cos) (1) ('Document10 pagesL12: Distortion and Interference in FM: D) (2 2 Cos) (1) ('Hunter VerneNo ratings yet
- Regulation and Control: by Tewedage SileshiDocument29 pagesRegulation and Control: by Tewedage SileshiSiraye AbirhamNo ratings yet
- Frequency Response Analysis and Bode PlotDocument44 pagesFrequency Response Analysis and Bode PlotRajendar PonagantiNo ratings yet
- Chapter 4Document45 pagesChapter 4Mohammad AliffuddinNo ratings yet
- Ee202laplacetransform PDFDocument85 pagesEe202laplacetransform PDFFairusabdrNo ratings yet
- Unit - 3 - Laplace Tarnsform and Transient AnalysisDocument83 pagesUnit - 3 - Laplace Tarnsform and Transient AnalysisJoseph AgboglaNo ratings yet
- Multi-Resolution Analysis (MRA)Document46 pagesMulti-Resolution Analysis (MRA)meenatchi5590No ratings yet
- Lecture 3 First Order SystemsDocument26 pagesLecture 3 First Order SystemsZena wNo ratings yet
- MOOC Assignment-3 Answers PDFDocument15 pagesMOOC Assignment-3 Answers PDFvamshiNo ratings yet
- Applications of Laplace Transform: EEE111 Electric Circuit AnalysisDocument29 pagesApplications of Laplace Transform: EEE111 Electric Circuit AnalysisCHAYANIN AKETANANUNNo ratings yet
- S-Domain Analysis: Poles,: Zeros, and Bode PlotsDocument7 pagesS-Domain Analysis: Poles,: Zeros, and Bode Plotshako mokoNo ratings yet
- Speech CompressionDocument14 pagesSpeech CompressionDavid UlloaNo ratings yet
- Unit3 Iir Design Lecture NotesDocument24 pagesUnit3 Iir Design Lecture NotesramuamtNo ratings yet
- Properties of Laplace Transform - I: Ang M.S 2012-8-14Document5 pagesProperties of Laplace Transform - I: Ang M.S 2012-8-14DineshNo ratings yet
- c4 PplaceDocument8 pagesc4 Pplacekenji91No ratings yet
- Laplace Circuit AnalysisDocument41 pagesLaplace Circuit AnalysishibaNo ratings yet
- Yn Ayn Aynn BXN BXNN: Recursive FiltersDocument28 pagesYn Ayn Aynn BXN BXNN: Recursive FiltersNikita ShakyaNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- COM120 Summer2020Lab4Document1 pageCOM120 Summer2020Lab4Aliemre TeltikNo ratings yet
- COM120 Summer2020Lab1Document1 pageCOM120 Summer2020Lab1Aliemre TeltikNo ratings yet
- COM120 Summer2020Lab4Document1 pageCOM120 Summer2020Lab4Aliemre TeltikNo ratings yet
- COM120 Summer2020Lab4Document1 pageCOM120 Summer2020Lab4Aliemre TeltikNo ratings yet
- Lecture9 - Digital CMOS LogicDocument27 pagesLecture9 - Digital CMOS LogicAliemre TeltikNo ratings yet
- Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi 5.uygulamaDocument6 pagesEge Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi 5.uygulamaAliemre TeltikNo ratings yet
- Multivibrators For Mikro Electronic CircuitsDocument18 pagesMultivibrators For Mikro Electronic CircuitsTeam PowerNo ratings yet
- Frequency Response (Part 2) : Mikroelektronik Devreler - 2Document14 pagesFrequency Response (Part 2) : Mikroelektronik Devreler - 2Team PowerNo ratings yet
- Lecture1 FilterDocument23 pagesLecture1 FilterAliemre TeltikNo ratings yet
- LEB 40903 Question 2014Document3 pagesLEB 40903 Question 2014Hakim SabRiNo ratings yet
- Zagi 60wDocument24 pagesZagi 60wAlexandre P. CruzNo ratings yet
- Bhavin Desai ResumeDocument5 pagesBhavin Desai Resumegabbu_No ratings yet
- Wide Body Shackle - CrosbyDocument1 pageWide Body Shackle - CrosbyPernando SagaNo ratings yet
- Feedback Control SystemDocument40 pagesFeedback Control SystemMuhammad SaeedNo ratings yet
- Settings For Enblocal IniDocument2 pagesSettings For Enblocal InisedessNo ratings yet
- ME 428 Nuclear Reactor Engineering Term Project Mechanical Engineering Department MetuDocument11 pagesME 428 Nuclear Reactor Engineering Term Project Mechanical Engineering Department Metuqyilmazoglu100% (1)
- CADA QP-Ktunotes - in PDFDocument3 pagesCADA QP-Ktunotes - in PDFsachinNo ratings yet
- Euroclad Guide To Design and Installation of Trapezoidal SystemsDocument44 pagesEuroclad Guide To Design and Installation of Trapezoidal SystemsLandon MitchellNo ratings yet
- Hydraulic ExcavatorDocument20 pagesHydraulic ExcavatorArvind HarryNo ratings yet
- Civl4333 STM-02Document6 pagesCivl4333 STM-02SamuelNo ratings yet
- 7 1988Document62 pages7 1988Broomie Ajem100% (1)
- Abb Contactor A45!40!00 24 Vac 60 HZDocument4 pagesAbb Contactor A45!40!00 24 Vac 60 HZRodriguez JohannNo ratings yet
- Abus Jib CranesDocument13 pagesAbus Jib CranesWibowo ArieNo ratings yet
- AutoCAD Structural Reinforcement Detailing Manual Eng 2010Document222 pagesAutoCAD Structural Reinforcement Detailing Manual Eng 2010Payincash100% (1)
- 5 - Statement of WorkDocument9 pages5 - Statement of WorkMoussa Karim AlioNo ratings yet
- Restore Guide Meridian1Document9 pagesRestore Guide Meridian1Manuel MayeNo ratings yet
- Laminated Composite Stiffened Panels Application and BehaviourDocument46 pagesLaminated Composite Stiffened Panels Application and BehaviourHemendra Jain100% (1)
- Visual Foxpro DOCUMENTDocument98 pagesVisual Foxpro DOCUMENTAndronache Andreea100% (2)
- David Brown Engineering LTDDocument2 pagesDavid Brown Engineering LTD'-MubashirBaigNo ratings yet
- Packet Tracer Skills Integration ChallengeDocument7 pagesPacket Tracer Skills Integration Challengekaloi0303No ratings yet
- Basf Masterflow 9300 Tds PDFDocument4 pagesBasf Masterflow 9300 Tds PDFbeck.26No ratings yet
- C++ Cheat SheetDocument9 pagesC++ Cheat SheetAddele CruzNo ratings yet
- Architectural Visual CommunicationDocument17 pagesArchitectural Visual CommunicationSanderNo ratings yet
- Summative Test: Computer Hardware ServicingDocument30 pagesSummative Test: Computer Hardware ServicingROMARIE QUIJANONo ratings yet
- Power HackSawDocument6 pagesPower HackSawMike Nichlos100% (2)
- Cape Computer Science 2011 Unit 2 P2Document5 pagesCape Computer Science 2011 Unit 2 P2dnitehawk qNo ratings yet
- Senior DesignI Fall 2014 IntroductionDocument31 pagesSenior DesignI Fall 2014 IntroductionSarah WilliamsNo ratings yet
- Design Professional Monthly Progress Report: Project Square FootageDocument2 pagesDesign Professional Monthly Progress Report: Project Square FootageCUNo ratings yet
- Resume BDK Poli PTSBDocument4 pagesResume BDK Poli PTSBamni_zakirah1689No ratings yet